树
前置知识
树是计算机中的一个抽象概念,形式上是递归的N个节点和N-1条边的集合,且每一条边都连接着一个相同的节点。这个特殊节点称为其他相连节点的父,其他相连节点是这个节点的子。特殊地,最开始的节点称为当前树的根节点,最终的没有子的节点称为叶。
从一个节点n1到另一个节点nk的路径定义为节点n1,n2,... ,nk的一个序列,使得ni总是ni+1的父。这条路径的长度就是边的数量,即k-1。
任意节点的深度是从根节点到该节点的唯一路径的长度。根节点的深度是0。
节点的高是从该节点到一个叶子节点的最长的路径长度。整棵树的高度就等于根节点的高度。所有叶子节点的高是0。
可以理解为,深度就是从根节点开始数到某节点的路径长度;高就是叶子节点到某节点的路径长度。
二叉树
结构
顾名思义,二叉树就是每个节点都有且仅有两个子的树。
template<typename T>
struct BinaryNode {
T data;
BinaryNode<T>* left{ nullptr };
BinaryNode<T>* right{ nullptr };
};
class BinaryTree {
public:
BinaryTree() = default;
virtual ~BinaryTree();
public:
BinaryNode<T>* m_root{ nullptr };
};
例如上述代码,BinaryNode是节点,保存了当前节点的数据,然后还有两个指针分别指向了自己的左右儿子。BinaryTree只需要保存根节点的指针,这样就是一个简单的二叉树。
遍历方式
对于二叉树而言,遍历可分为三种:前序遍历、中序遍历和后序遍历。前序遍历就是首先查看当前节点的数据,然后再分别查看两个子节点的数据(如果有的话);中序遍历就是先查看一个子节点的数据,然后再查看当前节点的数据,最后再查看另外一个子节点的数据;后序遍历就是先查看两个子节点的数据,最后再查看当前节点的数据。对于每个节点都递归地使用同样的逻辑进行查看数据。
二叉树的递归遍历实现起来不是很困难,基本上就是换个代码的执行顺序。用迭代的方式来实现一下,也算是一种加深理解的训练吧。(理论上,所有的递归逻辑代码都可以转换成迭代的方式,反之亦然。借用哪里看到过的一句话,“迭代是人,递归是神!”)。
// 前序遍历
template<typename T>
inline void BinaryTree<T>::preOrder(BinaryNode<T>* root, std::ostream& out) {
std::stack<BinaryNode<T>*> nodes;
nodes.push(root == nullptr ? m_root : root);
BinaryNode<T>* cur;
while(!nodes.empty()) {
cur = nodes.top();
nodes.pop();
out << cur->data << " ";
if(cur->right != nullptr) {
nodes.push(cur->right);
}
if(cur->left != nullptr) {
nodes.push(cur->left);
}
}
}
// 中序遍历
template<typename T>
inline void BinaryTree<T>::postOrder(BinaryNode<T>* root, std::ostream& out) {
std::stack<BinaryNode<T>*> nodes;
nodes.push(root == nullptr ? m_root : root);
std::stack<BinaryNode<T>*> print_nodes;
BinaryNode<T>* cur;
while(!nodes.empty()) {
cur = nodes.top();
nodes.pop();
print_nodes.push(cur);
if(cur->left != nullptr) {
nodes.push(cur->left);
}
if(cur->right != nullptr) {
nodes.push(cur->right);
}
}
while(!print_nodes.empty()) {
out << print_nodes.top()->data << " ";
print_nodes.pop();
}
}
// 后序遍历
template<typename T>
inline void BinaryTree<T>::middleOrder(BinaryNode<T>* root, std::ostream& out) {
std::stack<BinaryNode<T>*> nodes;
BinaryNode<T>* cur = root == nullptr ? m_root : root;
while(!nodes.empty() || cur != nullptr) {
while(cur != nullptr) {
nodes.push(cur);
cur = cur->left;
}
out << nodes.top()->data << " ";
cur = nodes.top()->right;
nodes.pop();
}
}
可以看到,迭代的实现方式确实看起来比较啰嗦,没有递归来的简洁和优雅(效率的话,应该是差不多的),也再一次印证了上述引用的那句话。
二叉搜索树
二叉搜索树是对二叉树的进一步优化的约束,二叉树太过于原始,数据被插入了就是被插入了,如果我们要找的话,基本就得从头遍历一遍所有二叉树的节点,这在某些场景下是不可被接受的。二叉搜索树添加了一条新的规则,在原有二叉树的基础上,规定左儿子的值一定是小于当前节点的,右儿子的值一定是大于当前节点的。这样再查找的时候就可以通过比较,将时间复杂度从O(n)降到O(logn)了,当然,这也意味着在插入的时候也需要多一点的操作。
直接看实现。
template<typename T>
class BinarySearchTree : private BinaryTree<T> {
public:
enum class Order : char {
pre,
middle,
post
};
virtual ~BinarySearchTree() = default;
void insert(const T& val);
void insert(T&& val);
void remove(const T& val);
void printTree(std::ostream& out = std::cout, Order ord = Order::pre) const;
const T& findMin() const;
const T& findMax() const;
bool contains(const T& x) const;
bool isEmpty() const;
void clear();
private:
void insert(const T& val, BinaryNode<T>* node);
void insert(T&& val, BinaryNode<T>* node);
void remove(const T& val, BinaryNode<T>* node);
BinaryNode<T>* findMin(BinaryNode<T>* node) const;
BinaryNode<T>* findMax(BinaryNode<T>* node) const;
bool constains(const T& val, BinaryNode<T>* node) const;
};
template<typename T>
inline bool BinarySearchTree<T>::contains(const T& x) const {
return constains(val, m_root);
}
template<typename T>
inline bool BinarySearchTree<T>::isEmpty() const {
return m_root == nullptr;
}
template<typename T>
inline void BinarySearchTree<T>::clear() {
clear(m_root);
}
template<typename T>
inline void BinarySearchTree<T>::insert(const T& val, BinaryNode<T>* node) {
if(node == nullptr) {
node = new BinaryNode<T>;
node->data = val;
return;
}
if(val > node->data) {
insert(val, node->right);
}
else if(val < val->data) {
insert(val, node->left);
}
}
template<typename T>
inline void BinarySearchTree<T>::insert(T&& val, BinaryNode<T>* node) {
if(node == nullptr) {
node = new BinaryNode<T>;
node->data = std::move(val);
return;
}
if(val > node->data) {
insert(std::forward(val), node->right);
}
else if(val < val->data) {
insert(std::forward(val), node->left);
}
}
template<typename T>
inline void BinarySearchTree<T>::remove(const T& val, BinaryNode<T>* node) {
if(node == nullptr) {
return;
}
if(val < node->data) {
remove(val, node->left);
}
else if(val > node->data) {
remove(val, node->right);
}
else if(node->left != nullptr && node->right != nullptr) {
// 有两个儿子,先找到右儿子的最小值,然后交换
node->data = findMin(node->right)->data;
remove(node->data, node->right);
}
else {
// 只有一个儿子,把儿子提上来就行了
BinaryNode<T> old = node;
node = node->left != nullptr ? node->left : node->right;
delete old;
}
}
template<typename T>
inline BinaryNode<T>* BinarySearchTree<T>::findMin(BinaryNode<T>* node) const {
if(node->left != nullptr) {
return findMin(node->left);
}
return node;
}
template<typename T>
inline BinaryNode<T>* BinarySearchTree<T>::findMax(BinaryNode<T>* node) const {
if(node->right != nullptr) {
return node->right;
}
return node;
}
template<typename T>
inline bool BinarySearchTree<T>::constains(const T& val, BinaryNode<T>* node) const {
if(node == nullptr) {
return false;
}
if(val < node->data) {
return constains(val, node->left);
}
else if(val > node->data) {
return constains(val, node->right);
}
return true;
}
template<typename T>
inline void BinarySearchTree<T>::insert(const T& val) {
insert(val, m_root);
}
template<typename T>
inline void BinarySearchTree<T>::insert(T&& val) {
insert(val, m_root);
}
template<typename T>
inline void BinarySearchTree<T>::remove(const T& val) {
remove(val, m_root);
}
template<typename T>
inline void BinarySearchTree<T>::printTree(std::ostream& out, Order ord) const {
if(ord == Order::pre) {
preOrder(m_root, out);
}
else if(ord == Order::middle) {
middleOrder(m_root, out);
}
else {
postOrder(m_root, out);
}
}
template<typename T>
inline const T& BinarySearchTree<T>::findMin() const {
return find(m_root)->data;
}
template<typename T>
inline const T& BinarySearchTree<T>::findMax() const {
return find(m_root)->data;
}
BinarySearchTree继承了之前写的BinaryTree,公有部分是提供的外部接口,实际的操作会由私有部分的代码来实现,算是一种良好的代码规范吧。
实例代码中仅实现了二叉搜索树的部分功能,比如重要的插入和删除,也应该足够展示二叉搜索树的特性了。
就如二叉搜索树的定义一样,插入使用递归的方式,比较要插入的数据和当前节点数据的大小关系,然后决定是插入还是继续向下遍历。
比较困难的是删除操作,如果我们要删除一个节点的数据,需要分类讨论一下:如果是叶子节点,当然可以直接删掉;如果只有一个儿子,也很好办,直接将儿子节点和父节点连接起来就可以了;如果有两个儿子,就不那么好办了,思考一下,将当前的节点的删除了,那么应该是子节点及以后的节点中的哪个来接替它的位置?
假设左节点是比当前节点小,右节点是比当前节点大,那么换上来的节点也不能够破坏这种关系,所以需要用比当前节点大的节点中的最小节点来替换。想到这就好办了,直接在右节点中去搜索最小节点,然后覆盖当前节点,最后再把多余的那个删除掉就大功告成了。(很显然,删除的操作代价还是比较大的,所以往往采用更有效率的“懒删除”方式,也就是当有节点要删除时,先不直接删除,而是打上一个标识来代表删除,如果后面再有相同数据的添加时,再把标识去掉就好了)。
AVL树
AVL树是带有平衡条件的二叉搜索树,平衡条件必须要容易保持,而且它保证树的深度是O(logn)的。一种思路是要求根节点的左右子树是深度相同的,不要求树的深度要浅,这样的意义其实并不大。另一种思路是要求每个节点都必须要有相同高度的左右子树,如果空子树的高度定义为-1(约定俗称),那么只有具有2k-1个节点的理想平衡树满足这个标准,显然,虽然这个条件保证了树的深度最小,但是它太过严格了以至于难以使用。
将第二种思路放宽条件,允许每个节点的左右子树的高度最多差1的二叉搜索树称为AVL(Adelson-Velsii和Landis)树。
旋转
根据定义,AVL树总可以保证除了插入和删除以外的操作都可以在O(logn)的时间复杂度内完成。而插入和删除时,需要更新通向根节点的路径上所有节点的平衡信息,这意味着插入一个节点,可能会破坏AVL树的特性(例如向深度最大的节点再插入一个节点时,可能就会导致这个节点的高度=兄弟节点高度+2,这违反了定义)。
/**
node0
/ \
node1 node2
\
node3
*/
当向node3再插入一个节点时,就会破坏AVL树的特性。
为了恢复平衡的性质,需要对树进行简单的修正,称为旋转。
把需要重新平衡的节点记作α,不平衡的情况则可以分成以下四种情况:
- 对α的左儿子的左子树进行了一次插入。
- 对α的左儿子的右子树进行了一次插入。
- 对α的右儿子的左子树进行了一次插入。
- 对α的右儿子的右子树进行了一次插入。
情况1和情况4是一组镜像,情况2和情况3也是一组镜像。对于儿子和孙子在同一边的情况(1和4)可以通过一次单旋转搞定;而对于不在同一边的情况(2和3)需要进行两次旋转(双旋转)来解决。
单旋转
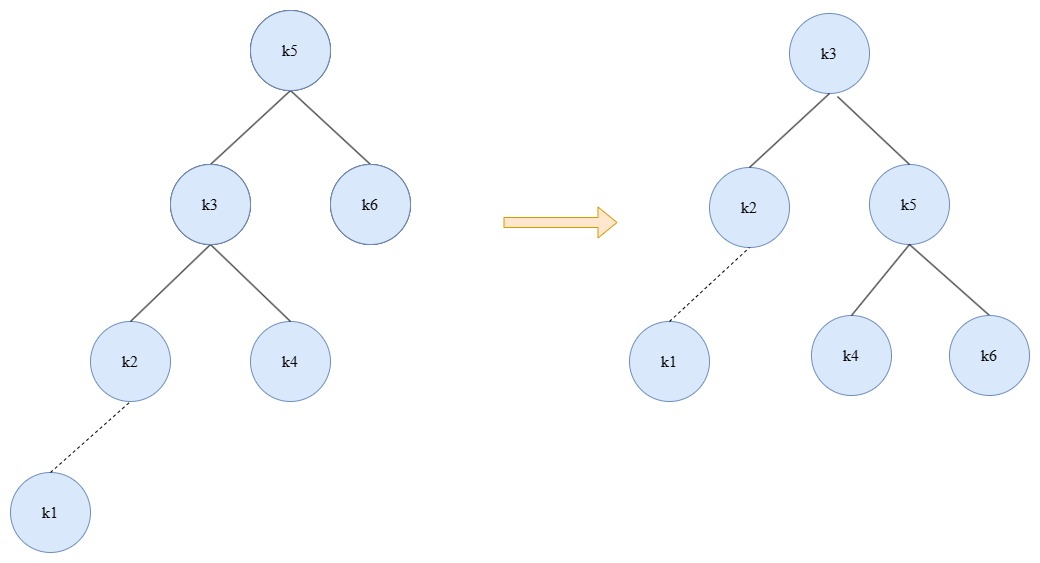
如图中展示的这样,在插入K1时,k5节点的左树高度比右树高度高2,已经不满足了AVL树的性质,需要进行一次旋转操作来保持AVL树的特性。分析当前情形,在插入后不满足条件的是k5,原因是在左子树中插入了一个更小的节点,也就是往左子树的左子树又插入了一个左节点。那么为了保持特性,就需要左子树的高度降低,把左儿子升上来,当前节点降下去,就等于左子树高度减一,右子树高度加一,变成右边的形式,这样就重新得到了一个AVL树。看起来就像是抓住左儿子不动,将树顺时针旋转了一下。
同理,之前也说了情况4和情况1是一对镜像操作,那么当向右儿子的右儿子插入一个右节点,导致AVL失衡时,就可以抓住右儿子不动,逆时针旋转一下,重新获得平衡。
实现代码
template<typename T>
inline void AvlTree<T>::rotateWithLeftChild(shared_ptr<Node<T>>& node) {
auto tmp = node->left;
node->left = tmp->right;
tmp->right = node;
node->height = std::max(high(node->left), high(node->right)) + 1;
tmp->height = std::max(high(tmp->left), high(tmp->right)) + 1;
node = tmp;
}
template<typename T>
inline void AvlTree<T>::rotateWithRightChild(shared_ptr<Node<T>>& node) {
auto tmp = node->right;
node->right = tmp->left;
tmp->left = node;
node->height = std::max(high(node->left), high(node->right)) + 1;
tmp->height = std::max(high(tmp->left), high(node->right)) + 1;
node = tmp;
}
rotateWithLeftChild表示左子树的高度过高,需要对左子树进行旋转,rotateWithRightChild表示右子树的高度过高,需要对右子树进行旋转,实际上就是交换了当前节点和过高节点的位置,然后需要将位置变换了的节点重新计算一下高度。
双旋转
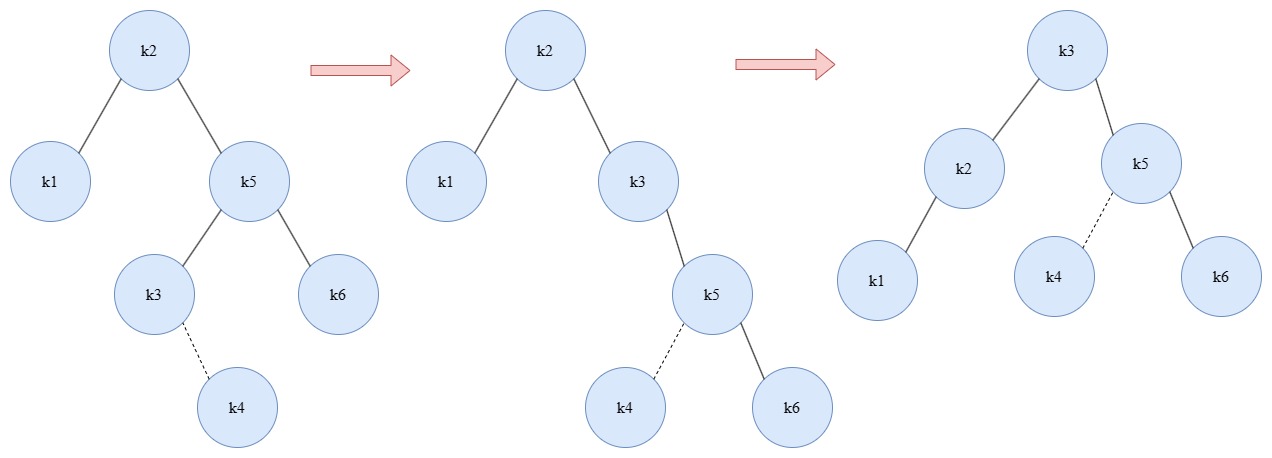
如左图所示,在插入k4节点的时候,此时k5的高度是2,k1的高度是0,导致k2节点再次不满足了AVL树的定义,那么我们想和上次一样,如果能够抓住k5进行旋转就好了,但可惜的是不太可行,因为此时的k5的子已经满了,如果以k5为基准来旋转,那么势必需要操作三个节点(k2、k5、k3),还是挺麻烦的。退而求其次,如果能将当前的情况经过一次操作,变成更简单的形式,就算是离成功更近了一步,因为是k3的深度太深了,导致不太好旋转,那就把它拿上去,于是得到了中间的形态。这时我们再观察能发现,这是我们熟悉的情形——情况4,那么顺势再进行一次旋转,整棵AVL树又重新获得了平衡。
实现代码
template<typename T>
inline void AvlTree<T>::doubleRotateWithLeftChild(shared_ptr<Node<T>>& node) {
rotateWithRightChild(node->left);
rotateWithLeftChild(node);
}
template<typename T>
inline void AvlTree<T>::doubleRotateWithRightChild(shared_ptr<Node<T>>& node) {
rotateWithLeftChild(node->right);
rotateWithRightChild(node);
}
正如分析的一样,双旋转就是旋转两次,先将导致不平衡的过深的节点转上来,再经过一步单旋转就可以获得平衡。每一步都只是父子两个节点之间的操作,这不难完成。
插入和删除
完整的插入和删除逻辑
template<typename T>
struct Node {
T value;
shared_ptr<Node<T>> left{ nullptr };
shared_ptr<Node<T>> right{ nullptr };
int height{ 0 };
explicit Node(T val) : value(val) { }
virtual ~Node() = default;
};
template<typename T>
class AvlTree {
public:
AvlTree() = default;
explicit AvlTree(T val);
virtual ~AvlTree() = default;
shared_ptr<Node<T>> root() const;
void insert(const T& val);
void remove(const T& val);
private:
void insert(const T& val, shared_ptr<Node<T>>& node);
void remove(const T& val, shared_ptr<Node<T>>& node);
void balance(shared_ptr<Node<T>>& node);
void rotateWithLeftChild(shared_ptr<Node<T>>& node);
void rotateWithRightChild(shared_ptr<Node<T>>& node);
void doubleRotateWithLeftChild(shared_ptr<Node<T>>& node);
void doubleRotateWithRightChild(shared_ptr<Node<T>>& node);
int high(const shared_ptr<Node<T>>& node) const;
shared_ptr<Node<T>> findMin(shared_ptr<Node<T>>& node);
private:
shared_ptr<Node<T>> m_root{ nullptr };
};
#endif // !avltree.hpp
template<typename T>
inline AvlTree<T>::AvlTree(T val) : m_root{std::make_shared<Node>(val)} { }
template<typename T>
inline shared_ptr<Node<T>> AvlTree<T>::root() const {
return m_root;
}
template<typename T>
inline void AvlTree<T>::insert(const T& val) {
insert(val, m_root);
}
template<typename T>
inline void AvlTree<T>::remove(const T& val) {
remove(val, m_root);
}
template<typename T>
inline int AvlTree<T>::high(const shared_ptr<Node<T>>& node) const {
return node == nullptr ? -1 : node->height;
}
template<typename T>
inline shared_ptr<Node<T>> AvlTree<T>::findMin(shared_ptr<Node<T>>& node) {
if(node->left == nullptr) {
return node;
}
return findMin(node->left);
}
template<typename T>
inline void AvlTree<T>::insert(const T& val, shared_ptr<Node<T>>& node) {
if(node == nullptr) {
node = std::make_pair<Node<T>>(val);
}
else if(val < node->value) {
insert(val, node->left);
}
else if(val > node->value) {
insert(val, node->right);
}
balance(node);
}
template<typename T>
inline void AvlTree<T>::remove(const T& val, shared_ptr<Node<T>>& node) {
if(node == nullptr) {
return;
}
if(val < node->value) {
remove(val, node->left);
}
else if(val > node->value) {
remove(val, node->right);
}
else if(node->left != nullptr && node->right != nullptr) {
// 两个子的情况
node->value = findMin(node->right)->value;
remove(node->value, node->right);
}
else {
// 只有一个子
node = node->left == nullptr ? node->right : node->left;
}
balance(node);
}
template<typename T>
inline void AvlTree<T>::balance(shared_ptr<Node<T>>& node) {
if(node == nullptr) {
return;
}
if(high(node->left) - high(node->right) > 1) {
high(node->left->left) >= high(node->left->right) ?
rotateWithLeftChild(node) : doubleRotateWithLeftChild(node);
}
else if(high(node->right) - high(node->left) > 1) {
high(node->right->left) >= high(node->right->right) ?
doubleRotateWithRightChild(node) : rotateWithRightChild(node);
}
node->height = std::max(high(node->left), high(node->right)) + 1;
}
template<typename T>
inline void AvlTree<T>::rotateWithLeftChild(shared_ptr<Node<T>>& node) {
auto tmp = node->left;
node->left = tmp->right;
tmp->right = node;
node->height = std::max(high(node->left), high(node->right)) + 1;
tmp->height = std::max(high(tmp->left), high(tmp->right)) + 1;
node = tmp;
}
template<typename T>
inline void AvlTree<T>::rotateWithRightChild(shared_ptr<Node<T>>& node) {
auto tmp = node->right;
node->right = tmp->left;
tmp->left = node;
node->height = std::max(high(node->left), high(node->right)) + 1;
tmp->height = std::max(high(tmp->left), high(node->right)) + 1;
node = tmp;
}
template<typename T>
inline void AvlTree<T>::doubleRotateWithLeftChild(shared_ptr<Node<T>>& node) {
rotateWithRightChild(node->left);
rotateWithLeftChild(node);
}
template<typename T>
inline void AvlTree<T>::doubleRotateWithRightChild(shared_ptr<Node<T>>& node) {
rotateWithLeftChild(node->right);
rotateWithRightChild(node);
}
重要的是balance这个函数,由于我们是在从根节点向下递归,所以balance会从下向上执行,也就是当出现不平衡时,会执行旋转操作,然后再依次向父节点继续平衡。再次感叹,递归是种伟大的思想,是一种从计算机的视角看待问题的思想。
伸展树
伸展树是一种相对简单的树结构,它不保证单次操作的时间,但可以使得对树的任意连续M次操作最多花费O(logn)时间。
一般来说,当M次的操作序列总的最坏运行时间是O(Mf(N))时,我们就说它的摊还运行时间是O(f(N))。
基于这样的实践经验:如果一个节点被访问到,那么它很可能在不久的将来还会被访问。也可以说是时间局部性的一种体现。
则伸展树的基本想法是,如果一个节点被访问到了,那么我们就经过一系列的AVL树的旋转操作,将它向根推进。
但是直接的旋转操作不是特别好的方法,因为在将一个节点向根推进的时候,往往会将另外的节点推到和它之前一样的深度,而对那个节点的访问,又会将另外的节点推向深处。
然后出现了一种更好的展开的思路,与旋转类似,不过在如何旋转上有一些选择的空间。
- 如果X的父节点是根节点,那么执行一次X和根节点的旋转即可。
- 否则,X节点就会有父节点P的祖父节点G,此时会有两种情况和对应的镜像情况,
- 三个节点之间构成“之”字形,那么执行一次AVL树类似的双旋转;
- 三个节点之间构成“一”字形,那么依次调换父子顺序。
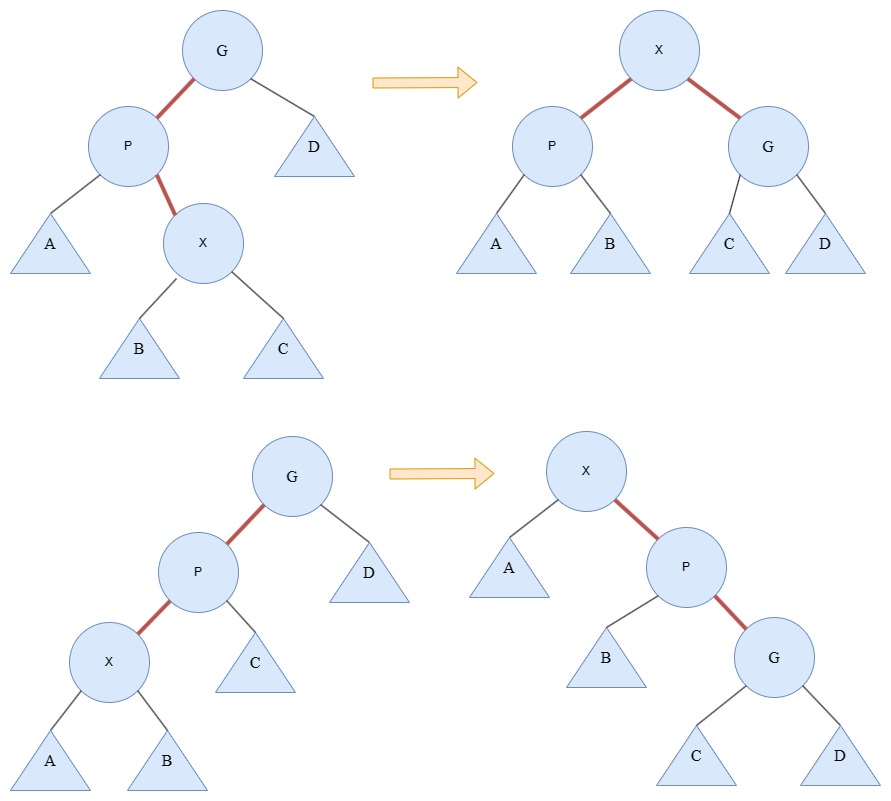
不难看出,在经过这种变换后,不仅将常访问的节点向根推进了,而且将访问路径上大部分节点的深度都降低了。
B树
做人不能没有B树(不是)
上述的各种树都是在我们假设数据都是存储在内存上的,但有些情况数据过大,不能全部存在内存中(比如数据库存储数据的场景),那么我们就需要将数据结构保存到磁盘上,这时由于磁盘和内存的操作时间相差巨大,大O模型不再适用(大O模型总是假设所有的操作都是相等的),游戏规则变了。
我们想要的是将硬盘的访问量尽量减少到一个非常小的常数范围,比如3~4次,而且也不想去写一个非常复杂的程序(只要你的代码不是太离谱,相比硬盘的访问时间,cpu和内存执行代码的时间基本上是可以忽略不计的)。
二叉树明显是不行不行的了,因为即使是完全二叉树,最好的时间复杂度也是O(logn)。那么我们自然想到的就是增加树的分支,树的分支越多,我们就可以获得更少的硬盘访问次数。这种多叉树称为M叉树,时间复杂度可以是O(logMN)。
对于M叉树,我们需要有M-1个关键字来决定选取哪个分支,并且需要可以通过某种方式得到平衡。于是B树(B+树)应运而生。
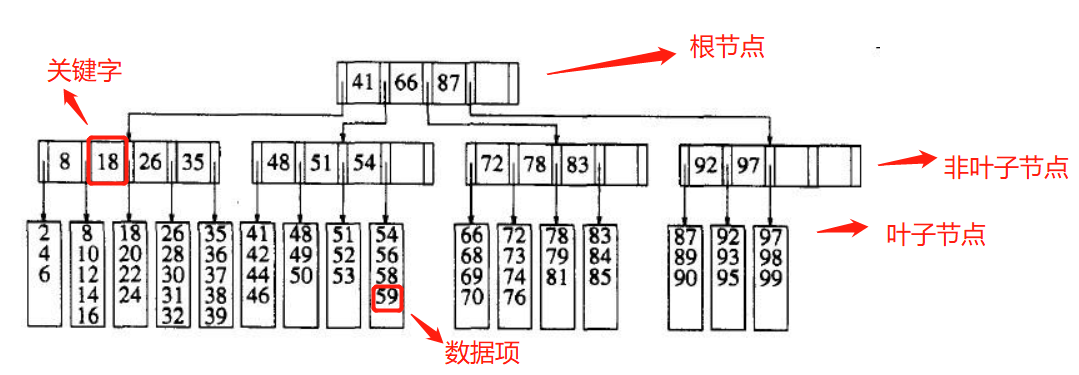
M阶的B树是一棵具有如下性质的M叉树:
- 数据项都存放在树叶上。
- 非叶节点存储直到M-1个关键词来指示搜索方向:关键字i代表子树i+1中最小的关键字。
- 树的根或者是叶节点,或者其儿子数在2到M之间。
- 除根节点外,所有非叶节点的儿子数在M/2到M之间。
- 所有的树叶具有相同的深度,并且每片树叶拥有的数据项数量在L/2和L之间,L会经过一些计算来得到。
例如,每个节点表示了磁盘的一个区块,假设一个区块的大小是8192字节(8k),现在有1000万项记录,每个记录要256字节,每一个关键字需要32字节,那么在一棵M阶的B树中,将会有M-1个关键字,总共需要32M-32字节,还有M个分支,假设一个分支占4字节,那么一个非叶子节点的总的内存需求是36M-32字节。使得不超过8192字节的M的最大值是228,所以我们确定这棵树是一颗228叉树。因为一条记录的大小是256字节,我们可以把32个记录放在同一个区块中,从而确定了L=32。结合上述性质,我们得到了这样一棵树,它可以保证每片叶子都有16~32个数据,且每个内部节点(除根节点外)都至少会以114种方式分叉。由于有1000万数据,则至多需要625000片叶子,最坏的情况下也必然可以在第四层上找到数据,还是可以接受的。
剩下的就是B树的插入和删除问题了,这里只是简单描述下,详细的内容值得专门去探索。重复B树的性质,叶节点保存了L/2到L个数据,那么对于一个没有满的叶子插入是简单的,只要放进对应位置即可,而当对一个满了的叶子再插入一个数据时,就需要进行分裂操作,也就是将这个叶子分裂成两片叶子,分别写入到了两个区块中,然后再更新一下父节点。也就是说,对于一个分裂操作需要至少额外的两次磁盘操作(父节点如果也满了需要再向上递归分裂)。好在分裂的操作其实并不频繁,因为在一次分裂后,我们重新获得了两个装有M/2个数据的叶子,那么至少还可以进行M/2次插入操作后才会再次分裂。最坏的结果是直到根节点都满了,那么按照规则,根节点将分裂成两个,显然两个根节点是不太能接受的,那么我们就要再新建一个节点作为根节点,然后将分裂出的两个节点作为其子节点,这也是为什么性质3允许根节点有两个儿子的原因,这也是B树高度增加的唯一方式。
删除操作可以看作是插入操作的逆向,不多赘述。另外,在删除时,非叶子节点的儿子可能无法满足性质4,这时候可以通过“领养”的方式,将临近节点多的儿子放到自己节点下。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号