SMACH专题(三)----几种State类型
状态机提供了若干种状态,包括了Generic State,CBState,SimpleActionState (ROS),ServiceState (ROS),MonitorState (ROS)。下面分别介绍它们的用法和例子。
一、CBState回调状态
将一个函数封装成状态,这种状态成为回调状态。这种函数非类中的函数,而是一般的函数。下面是一个例子:
1 #!/usr/bin/env python 2 # license removed for brevity 3 4 import rospy 5 from std_msgs.msg import String 6 import math 7 import random 8 from smach import CBState, StateMachine 9 from smach_ros import IntrospectionServer 10 import smach 11 12 @smach.cb_interface( 13 output_keys=['xyz'], 14 outcomes=['outcome1','outcome2']) 15 def fun_cb(ud,x0, x, y, z): 16 ''' 17 callback function, which is called in CBState way, it seems to be used by 18 function, but the class'funtion 19 ''' 20 #x0 is the value of cb_args=[10], equal to 10 21 dist = math.sqrt(x0*x0+x*x+y*y+z*z+100*random.random()) 22 ud.xyz = dist 23 if dist > 10: 24 return 'outcome1' 25 else: 26 return 'outcome2' 27 28 class Test_CbState(): 29 def __init__(self): 30 rospy.init_node('smach_example_callback_state') 31 self.sample_name = "cbstate" 32 33 def test(self): 34 ''' 35 test Callback State Machine 36 ''' 37 self.sm = StateMachine(outcomes = ['outcome3']) 38 with self.sm: 39 StateMachine.add('Test_CB',CBState(fun_cb, 40 cb_args=[10], 41 cb_kwargs={'x':1,'y':2,'z':3}), 42 {'outcome1':'outcome3','outcome2':'Test_CB'}) 43 sis = IntrospectionServer('test_cb_state', self.sm, '/SM_ROOT') 44 sis.start() 45 46 self.sm.execute('Test_CB') 47 48 rospy.spin() 49 sis.stop() 50 51 if __name__ == '__main__': 52 ''' 53 main funtion 54 ''' 55 test_sm_cbstate = Test_CbState() 56 test_sm_cbstate.test() 57
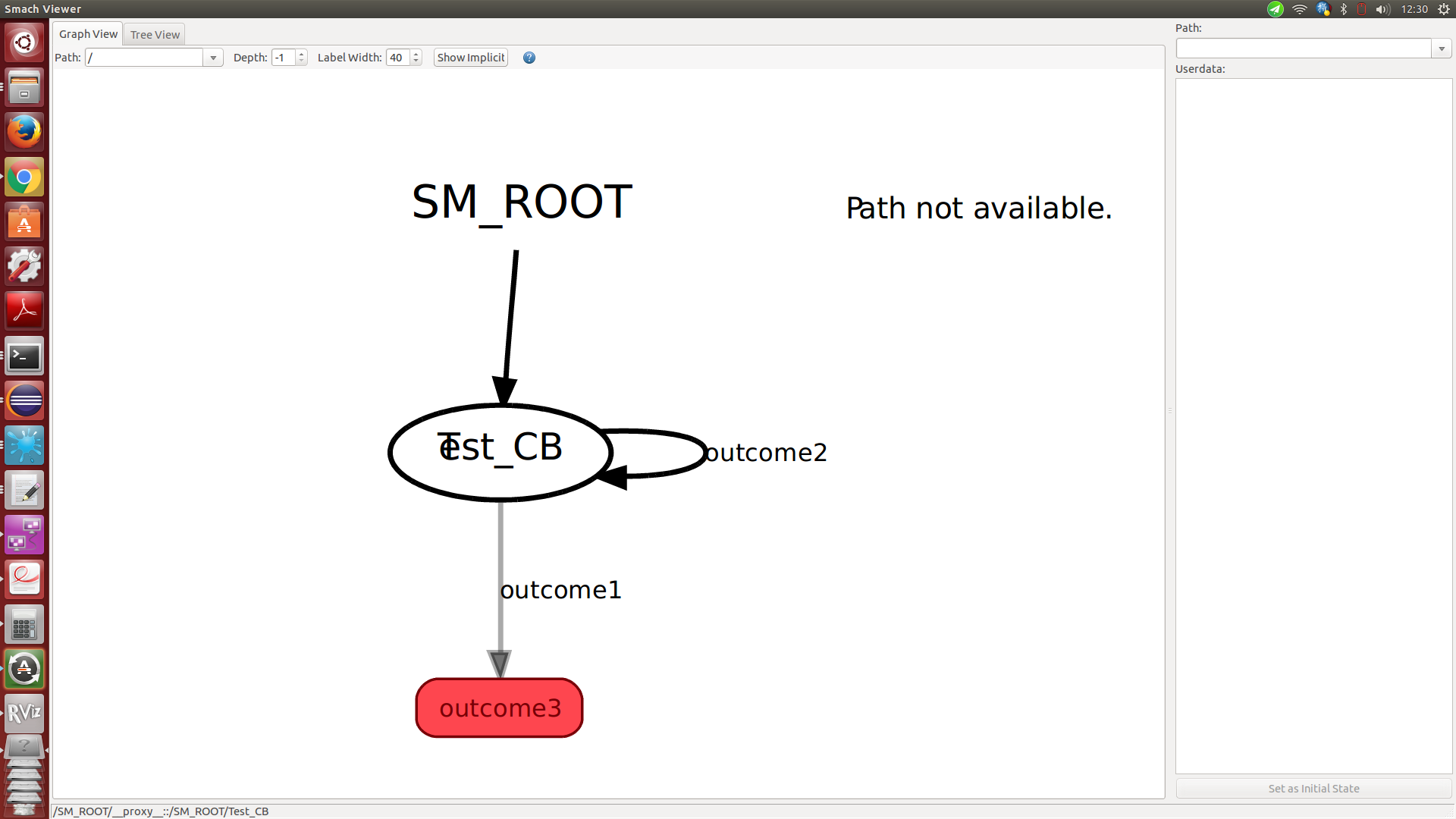
状态图,如下图所示:
参考资料:
[1]. CBState
Make Change - Focus on Computer Vision and Pattern Recognition
版权声明:本文为博主原创文章,未经博主允许不得转载
版权声明:本文为博主原创文章,未经博主允许不得转载

 浙公网安备 33010602011771号
浙公网安备 33010602011771号