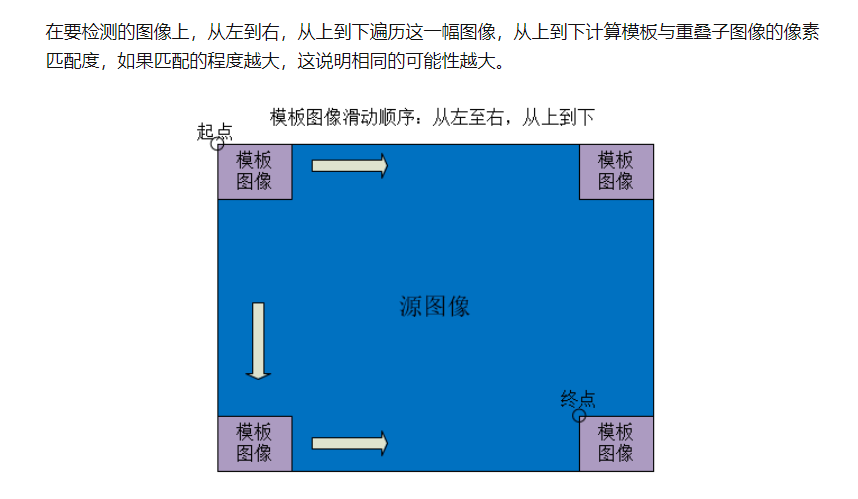
二维视角下的模板匹配
涉猎了二维视角下的模板匹配,用这篇博客记录一下,顺便再理一理思路,方便向三维的模板匹配扩展。
模板匹配定义:
模板匹配是一种最原始、最基本的模式识别方法,研究某一特定对象物的图案位于图像的什么地方,进而识别对象物,这就是一个匹配问题。
可以这样理解,手中有两张图片,一张是模板图片,另一张是场景图片,要找到模板在场景中的位置,同时确定模板图片到场景图片的变换矩阵\(H\),这样的一个任务。
相关算法
基于灰度值的模板匹配
解释一下相关的原理:
在OpenCV中支持以下6种对比方式:
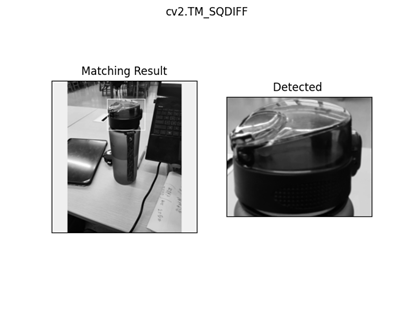
- CV_TM_SQDIFF 平方差匹配法:该方法采用平方差来进行匹配;最好的匹配值为0;匹配越差,匹配值越大。
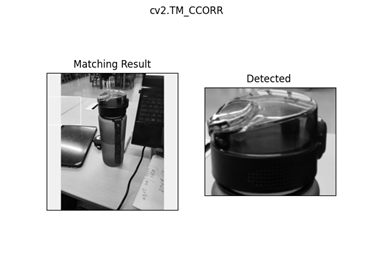
- CV_TM_CCORR 相关匹配法:该方法采用乘法操作;数值越大表明匹配程度越好。
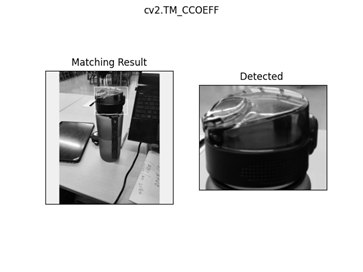
- CV_TM_CCOEFF 相关系数匹配法:1表示完美的匹配;-1表示最差的匹配。
- CV_TM_SQDIFF_NORMED 归一化平方差匹配法
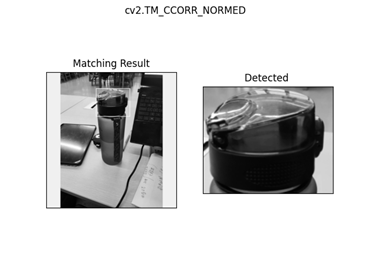
- CV_TM_CCORR_NORMED 归一化相关匹配法
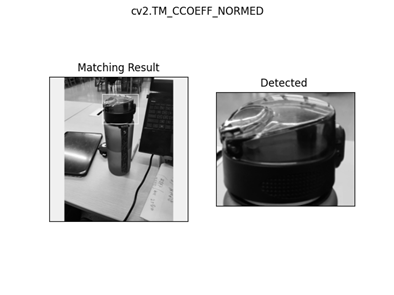
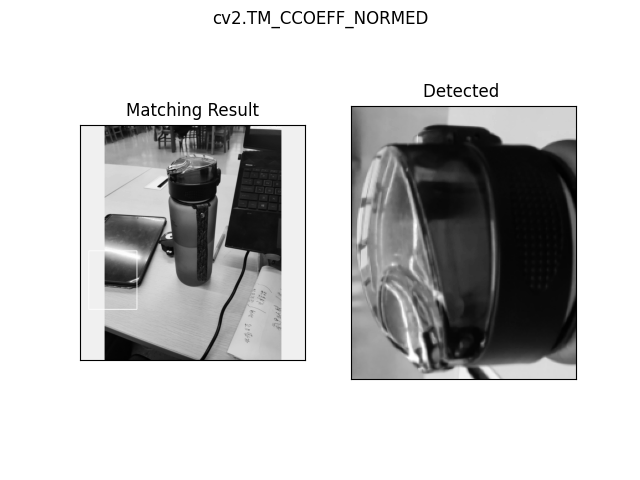
- CV_TM_CCOEFF_NORMED 归一化相关系数匹配法
我们看一下匹配的实际情况:
 |
 |
 |
 |
 |
 |
|---|
这个方法其实是很不"智能",结合原理可知。一旦模板发生大幅度的旋转,放缩,错切,则匹配就会很难成功。而且也很难应对相机拍摄角度发生变化的情况。如果有小伙伴有针对这个的优化想法,欢迎留言讨论。
基于描述符的模板匹配
这个是很值得探讨的一种模板匹配的方法,我们可以先看一下流程图:

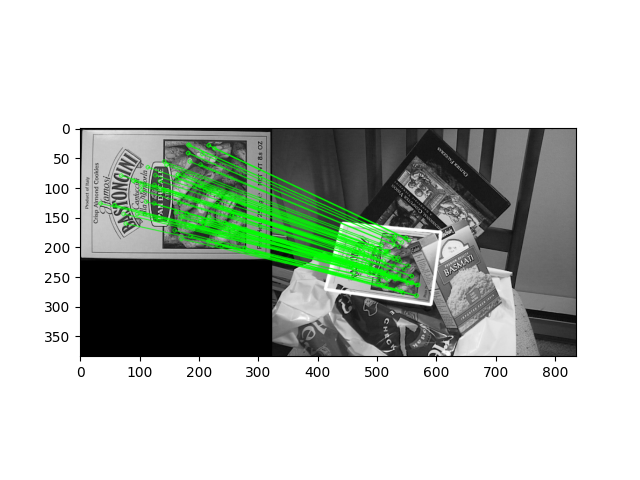
模板图和场景图分别通过特征提取算法得到它们各自的特征点, 描述子,然后将描述子送入KNN进行匹配,建立起点到点的对应关系。之后再用OpenCV里的findHomography()函数求出点到点的映射矩阵。之后再用模板图片边框四个点的坐标乘以这个映射矩阵,就得到了模板图片在场景图片中的位置。
这个算法最重要的地方是特征提取算法。算法提取到的特征点,描述子是否能够对图片的旋转,放缩,错切等变换具有鲁棒性,将直接决定KNN中能有多少点匹配上,进而影响后面的操作。举个例子,一个模板图片,相对于场景图片发生了一些透视变换,如果导致提取到的描述子的“距离变远了”,那这个算法就不能很好的应对这些变换。
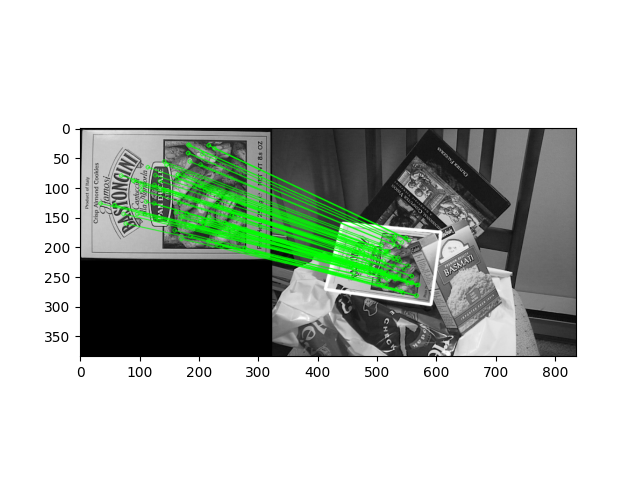
我们以sift举例,表现还不错:
 |
 |
 |
|---|
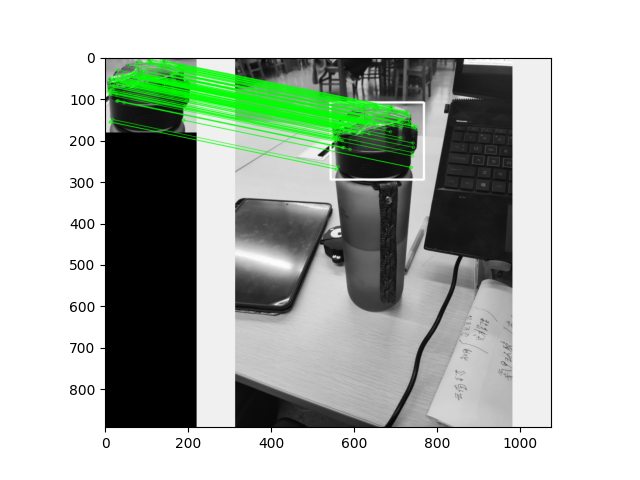
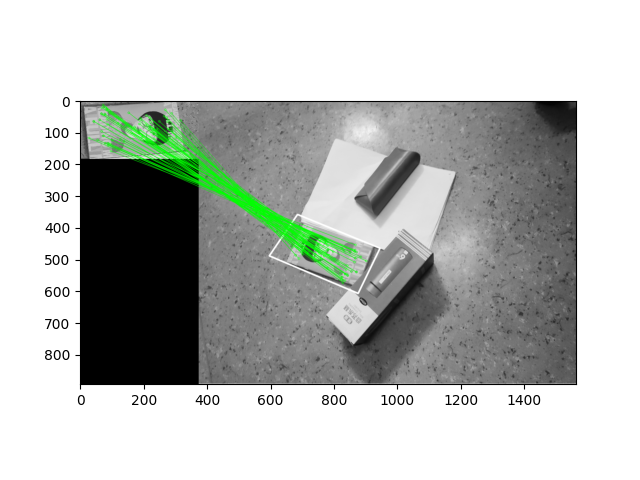
基于学习的特征提取算法与SIFT进行对比
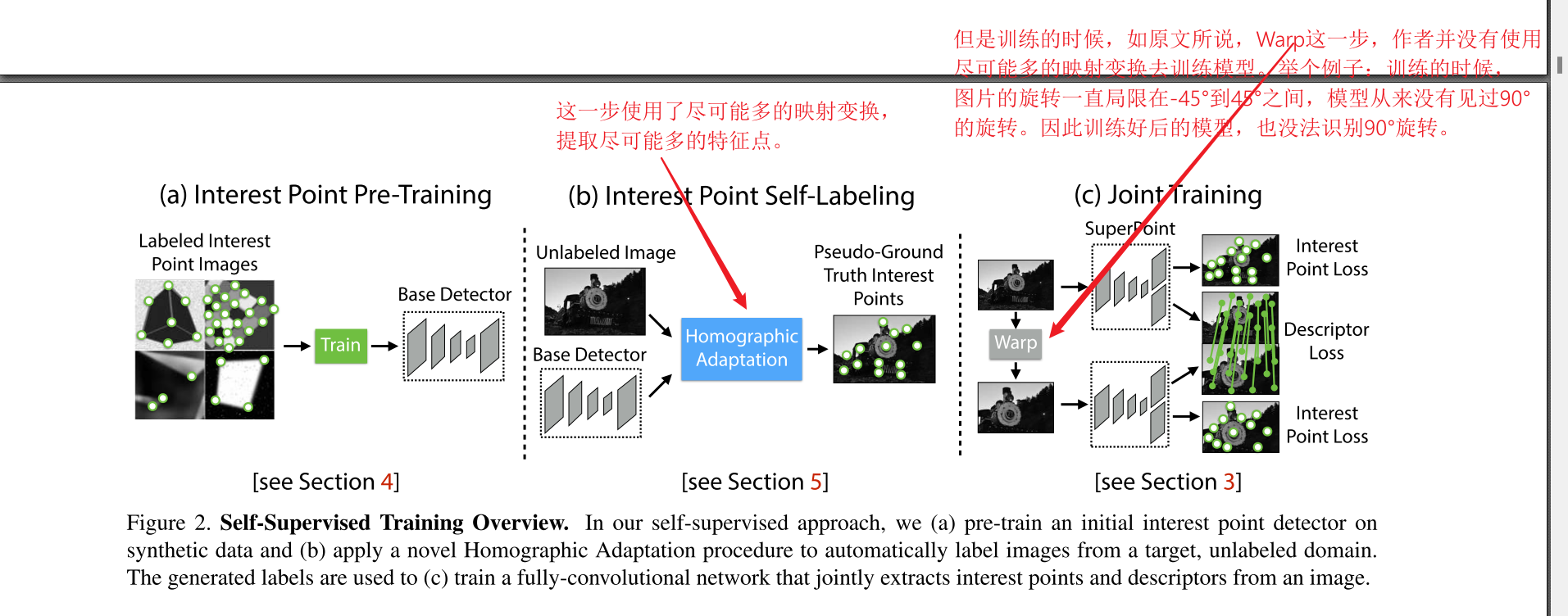
- SuperPoint结构
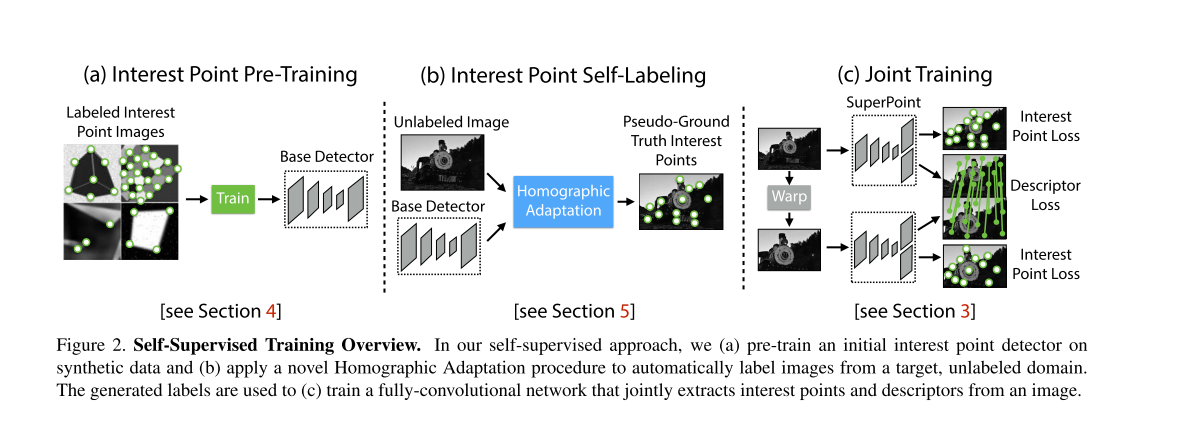
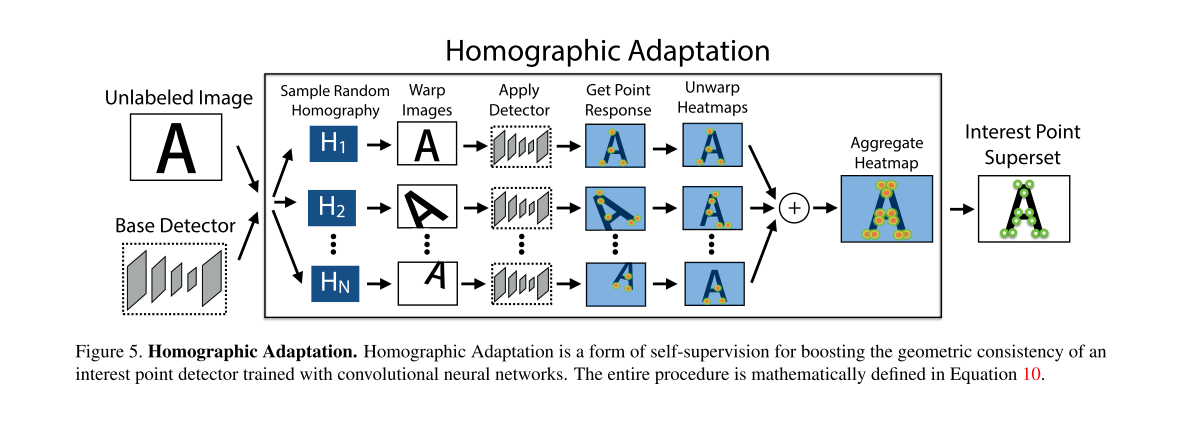
基于学习的特征提取算法,以SuperPoint为例。
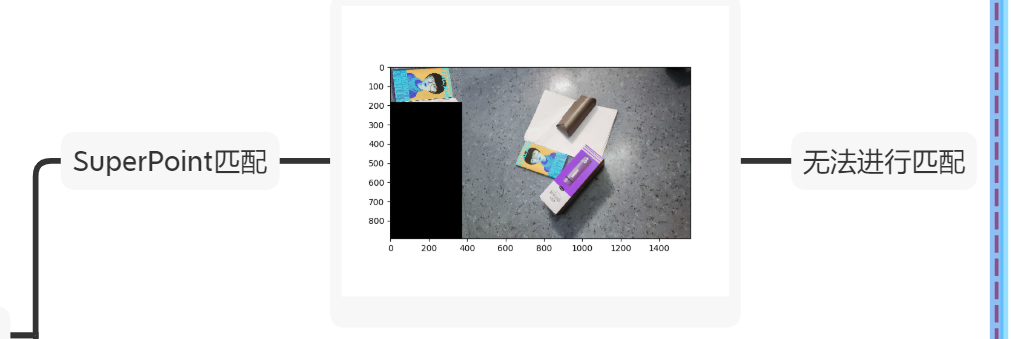
总结如下:

SuperPoint无法匹配较大透视变换的原因推测:
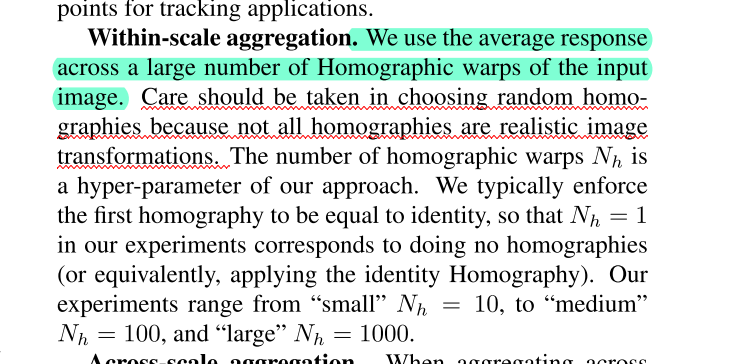
原文:
代码
SIFT.py
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
MIN_MATCH_COUNT = 10
#
img1 = cv.imread('data/box.png',0) # queryImage
img2 = cv.imread('data/box_in_scene.png',0) # trainImage
# Initiate SIFT detector
sift = cv.SIFT_create()
# find the keypoints and descriptors with SIFT
kp1, des1 = sift.detectAndCompute(img1,None)
kp2, des2 = sift.detectAndCompute(img2,None)
FLANN_INDEX_KDTREE = 1
index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
search_params = dict(checks = 50)
flann = cv.FlannBasedMatcher(index_params, search_params)
matches = flann.knnMatch(des1,des2,k=2)
# store all the good matches as per Lowe's ratio test.
good = []
for m,n in matches:
if m.distance < 0.7*n.distance:
good.append(m)
print("The number of keypoints in image1 is", len(kp1))
print("The number of keypoints in image2 is", len(kp2))
if len(good)>MIN_MATCH_COUNT:
src_pts = np.float32([ kp1[m.queryIdx].pt for m in good ]).reshape(-1,1,2)
dst_pts = np.float32([ kp2[m.trainIdx].pt for m in good ]).reshape(-1,1,2)
M, mask = cv.findHomography(src_pts, dst_pts, cv.RANSAC,5.0)
matchesMask = mask.ravel().tolist()
h,w = img1.shape
pts = np.float32([ [0,0],[0,h-1],[w-1,h-1],[w-1,0] ]).reshape(-1,1,2)
dst = cv.perspectiveTransform(pts,M)
img2 = cv.polylines(img2,[np.int32(dst)],True,255,3, cv.LINE_AA)
else:
print( "Not enough matches are found - {}/{}".format(len(good), MIN_MATCH_COUNT) )
matchesMask = None
print("the number of matches is ", len(matchesMask))
draw_params = dict(matchColor = (0,255,0), # draw matches in green color
singlePointColor = None,
matchesMask = matchesMask, # draw only inliers
flags = 2)
img3 = cv.drawMatches(img1,kp1,img2,kp2,good,None,**draw_params)
plt.imshow(img3),plt.show()
SuperPoint.py
import numpy as np
import os
import cv2
import torch
from matplotlib import pyplot as plt
MIN_MATCH_COUNT = 10
# Jet colormap for visualization.
myjet = np.array([[0., 0., 0.5],
[0., 0., 0.99910873],
[0., 0.37843137, 1.],
[0., 0.83333333, 1.],
[0.30044276, 1., 0.66729918],
[0.66729918, 1., 0.30044276],
[1., 0.90123457, 0.],
[1., 0.48002905, 0.],
[0.99910873, 0.07334786, 0.],
[0.5, 0., 0.]])
class SuperPointNet(torch.nn.Module):
""" Pytorch definition of SuperPoint Network. """
def __init__(self):
super(SuperPointNet, self).__init__()
self.relu = torch.nn.ReLU(inplace=True)
self.pool = torch.nn.MaxPool2d(kernel_size=2, stride=2)
c1, c2, c3, c4, c5, d1 = 64, 64, 128, 128, 256, 256
# Shared Encoder.
self.conv1a = torch.nn.Conv2d(1, c1, kernel_size=3, stride=1, padding=1)
self.conv1b = torch.nn.Conv2d(c1, c1, kernel_size=3, stride=1, padding=1)
self.conv2a = torch.nn.Conv2d(c1, c2, kernel_size=3, stride=1, padding=1)
self.conv2b = torch.nn.Conv2d(c2, c2, kernel_size=3, stride=1, padding=1)
self.conv3a = torch.nn.Conv2d(c2, c3, kernel_size=3, stride=1, padding=1)
self.conv3b = torch.nn.Conv2d(c3, c3, kernel_size=3, stride=1, padding=1)
self.conv4a = torch.nn.Conv2d(c3, c4, kernel_size=3, stride=1, padding=1)
self.conv4b = torch.nn.Conv2d(c4, c4, kernel_size=3, stride=1, padding=1)
# Detector Head.
self.convPa = torch.nn.Conv2d(c4, c5, kernel_size=3, stride=1, padding=1)
self.convPb = torch.nn.Conv2d(c5, 65, kernel_size=1, stride=1, padding=0)
# Descriptor Head.
self.convDa = torch.nn.Conv2d(c4, c5, kernel_size=3, stride=1, padding=1)
self.convDb = torch.nn.Conv2d(c5, d1, kernel_size=1, stride=1, padding=0)
def forward(self, x):
""" Forward pass that jointly computes unprocessed point and descriptor
tensors.
Input
x: Image pytorch tensor shaped N x 1 x H x W.
Output
semi: Output point pytorch tensor shaped N x 65 x H/8 x W/8.
desc: Output descriptor pytorch tensor shaped N x 256 x H/8 x W/8.
"""
# Shared Encoder.
x = self.relu(self.conv1a(x))
x = self.relu(self.conv1b(x))
x = self.pool(x)
x = self.relu(self.conv2a(x))
x = self.relu(self.conv2b(x))
x = self.pool(x)
x = self.relu(self.conv3a(x))
x = self.relu(self.conv3b(x))
x = self.pool(x)
x = self.relu(self.conv4a(x))
x = self.relu(self.conv4b(x))
# Detector Head.
cPa = self.relu(self.convPa(x))
semi = self.convPb(cPa)
# Descriptor Head.
cDa = self.relu(self.convDa(x))
desc = self.convDb(cDa)
dn = torch.norm(desc, p=2, dim=1) # Compute the norm.
desc = desc.div(torch.unsqueeze(dn, 1)) # Divide by norm to normalize.
return semi, desc
class SuperPointFrontend(object):
""" Wrapper around pytorch net to help with pre and post image processing. """
def __init__(self, weights_path, nms_dist, conf_thresh, nn_thresh,
cuda=False):
self.name = 'SuperPoint'
self.cuda = cuda
self.nms_dist = nms_dist
self.conf_thresh = conf_thresh
self.nn_thresh = nn_thresh # L2 descriptor distance for good match.
self.cell = 8 # Size of each output cell. Keep this fixed.
self.border_remove = 4 # Remove points this close to the border.
# Load the network in inference mode.
self.net = SuperPointNet()
if cuda:
# Train on GPU, deploy on GPU.
self.net.load_state_dict(torch.load(weights_path))
self.net = self.net.cuda()
else:
# Train on GPU, deploy on CPU.
self.net.load_state_dict(torch.load(weights_path,
map_location=lambda storage, loc: storage))
self.net.eval()
def nms_fast(self, in_corners, H, W, dist_thresh):
"""
Run a faster approximate Non-Max-Suppression on numpy corners shaped:
3xN [x_i,y_i,conf_i]^T
Algo summary: Create a grid sized HxW. Assign each corner location a 1, rest
are zeros. Iterate through all the 1's and convert them either to -1 or 0.
Suppress points by setting nearby values to 0.
Grid Value Legend:
-1 : Kept.
0 : Empty or suppressed.
1 : To be processed (converted to either kept or supressed).
NOTE: The NMS first rounds points to integers, so NMS distance might not
be exactly dist_thresh. It also assumes points are within image boundaries.
Inputs
in_corners - 3xN numpy array with corners [x_i, y_i, confidence_i]^T.
H - Image height.
W - Image width.
dist_thresh - Distance to suppress, measured as an infinty norm distance.
Returns
nmsed_corners - 3xN numpy matrix with surviving corners.
nmsed_inds - N length numpy vector with surviving corner indices.
"""
grid = np.zeros((H, W)).astype(int) # Track NMS data.
inds = np.zeros((H, W)).astype(int) # Store indices of points.
# Sort by confidence and round to nearest int.
inds1 = np.argsort(-in_corners[2, :])
corners = in_corners[:, inds1]
rcorners = corners[:2, :].round().astype(int) # Rounded corners.
# Check for edge case of 0 or 1 corners.
if rcorners.shape[1] == 0:
return np.zeros((3, 0)).astype(int), np.zeros(0).astype(int)
if rcorners.shape[1] == 1:
out = np.vstack((rcorners, in_corners[2])).reshape(3, 1)
return out, np.zeros((1)).astype(int)
# Initialize the grid.
for i, rc in enumerate(rcorners.T):
grid[rcorners[1, i], rcorners[0, i]] = 1
inds[rcorners[1, i], rcorners[0, i]] = i
# Pad the border of the grid, so that we can NMS points near the border.
pad = dist_thresh
grid = np.pad(grid, ((pad, pad), (pad, pad)), mode='constant')
# Iterate through points, highest to lowest conf, suppress neighborhood.
count = 0
for i, rc in enumerate(rcorners.T):
# Account for top and left padding.
pt = (rc[0] + pad, rc[1] + pad)
if grid[pt[1], pt[0]] == 1: # If not yet suppressed.
grid[pt[1] - pad:pt[1] + pad + 1, pt[0] - pad:pt[0] + pad + 1] = 0
grid[pt[1], pt[0]] = -1
count += 1
# Get all surviving -1's and return sorted array of remaining corners.
keepy, keepx = np.where(grid == -1)
keepy, keepx = keepy - pad, keepx - pad
inds_keep = inds[keepy, keepx]
out = corners[:, inds_keep]
values = out[-1, :]
inds2 = np.argsort(-values)
out = out[:, inds2]
out_inds = inds1[inds_keep[inds2]]
return out, out_inds
def run(self, img):
""" Process a numpy image to extract points and descriptors.
Input
img - HxW numpy float32 input image in range [0,1].
Output
corners - 3xN numpy array with corners [x_i, y_i, confidence_i]^T.
desc - 256xN numpy array of corresponding unit normalized descriptors.
heatmap - HxW numpy heatmap in range [0,1] of point confidences.
"""
assert img.ndim == 2, 'Image must be grayscale.'
assert img.dtype == np.float32, 'Image must be float32.'
H, W = img.shape[0], img.shape[1]
inp = img.copy()
inp = (inp.reshape(1, H, W))
inp = torch.from_numpy(inp)
inp = torch.autograd.Variable(inp).view(1, 1, H, W)
if self.cuda:
inp = inp.cuda()
# Forward pass of network.
outs = self.net.forward(inp)
semi, coarse_desc = outs[0], outs[1]
# Convert pytorch -> numpy.
semi = semi.data.cpu().numpy().squeeze()
# --- Process points.
# C = np.max(semi)
# dense = np.exp(semi - C) # Softmax.
# dense = dense / (np.sum(dense)) # Should sum to 1.
dense = np.exp(semi) # Softmax.
dense = dense / (np.sum(dense, axis=0) + .00001) # Should sum to 1.
# Remove dustbin.
nodust = dense[:-1, :, :]
# Reshape to get full resolution heatmap.
Hc = int(H / self.cell)
Wc = int(W / self.cell)
nodust = nodust.transpose(1, 2, 0)
heatmap = np.reshape(nodust, [Hc, Wc, self.cell, self.cell])
heatmap = np.transpose(heatmap, [0, 2, 1, 3])
heatmap = np.reshape(heatmap, [Hc * self.cell, Wc * self.cell])
xs, ys = np.where(heatmap >= self.conf_thresh) # Confidence threshold.
if len(xs) == 0:
return np.zeros((3, 0)), None, None
pts = np.zeros((3, len(xs))) # Populate point data sized 3xN.
pts[0, :] = ys
pts[1, :] = xs
pts[2, :] = heatmap[xs, ys]
pts, _ = self.nms_fast(pts, H, W, dist_thresh=self.nms_dist) # Apply NMS.
inds = np.argsort(pts[2, :])
pts = pts[:, inds[::-1]] # Sort by confidence.
# Remove points along border.
bord = self.border_remove
toremoveW = np.logical_or(pts[0, :] < bord, pts[0, :] >= (W - bord))
toremoveH = np.logical_or(pts[1, :] < bord, pts[1, :] >= (H - bord))
toremove = np.logical_or(toremoveW, toremoveH)
pts = pts[:, ~toremove]
# --- Process descriptor.
D = coarse_desc.shape[1]
if pts.shape[1] == 0:
desc = np.zeros((D, 0))
else:
# Interpolate into descriptor map using 2D point locations.
samp_pts = torch.from_numpy(pts[:2, :].copy())
samp_pts[0, :] = (samp_pts[0, :] / (float(W) / 2.)) - 1.
samp_pts[1, :] = (samp_pts[1, :] / (float(H) / 2.)) - 1.
samp_pts = samp_pts.transpose(0, 1).contiguous()
samp_pts = samp_pts.view(1, 1, -1, 2)
samp_pts = samp_pts.float()
if self.cuda:
samp_pts = samp_pts.cuda()
desc = torch.nn.functional.grid_sample(coarse_desc, samp_pts)
desc = desc.data.cpu().numpy().reshape(D, -1)
desc /= np.linalg.norm(desc, axis=0)[np.newaxis, :]
return pts, desc, heatmap
if __name__ == '__main__':
print('==> Loading pre-trained network.')
# This class runs the SuperPoint network and processes its outputs.
fe = SuperPointFrontend(weights_path="./model/superpoint_v1.pth",
nms_dist=4,
conf_thresh=0.015,
nn_thresh=0.7,
cuda=True)
print('==> Successfully loaded pre-trained network.')
pic1 = "data/wulala.png"
pic2 = "data/viewPoint2.png"
image1_origin = cv2.imread(pic1)
image2_origin = cv2.imread(pic2)
img1 = cv2.imread(pic1, cv2.IMREAD_GRAYSCALE).astype(np.float32)
img2 = cv2.imread(pic2, cv2.IMREAD_GRAYSCALE).astype(np.float32)
img1 = img1 / 255.
img2 = img2 / 255.
if img1 is None or img2 is None:
print('Could not open or find the images!')
exit(0)
# -- Step 1: Detect the keypoints using SURF Detector, compute the descriptors
kp1, des1, h1 = fe.run(img1)
kp2, des2, h2 = fe.run(img2)
## to transfer array ==> KeyPoints
kp1 = [cv2.KeyPoint(kp1[0][i], kp1[1][i], 1)
for i in range(kp1.shape[1])]
kp2 = [cv2.KeyPoint(kp2[0][i], kp2[1][i], 1)
for i in range(kp2.shape[1])]
print("The number of keypoints in image1 is", len(kp1))
print("The number of keypoints in image2 is", len(kp2))
# -- Step 2: Matching descriptor vectors with a FLANN based matcher
# Since SURF is a floating-point descriptor NORM_L2 is used
matcher = cv2.DescriptorMatcher_create(cv2.DescriptorMatcher_FLANNBASED)
knn_matches = matcher.knnMatch(des1.T, des2.T, 2)
# -- Filter matches using the Lowe's ratio test
ratio_thresh = 0.7
good = []
for m, n in knn_matches:
if m.distance < ratio_thresh * n.distance:
good.append(m)
if len(good)>MIN_MATCH_COUNT:
src_pts = np.float32([ kp1[m.queryIdx].pt for m in good ]).reshape(-1,1,2)
dst_pts = np.float32([ kp2[m.trainIdx].pt for m in good ]).reshape(-1,1,2)
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC,5.0)
matchesMask = mask.ravel().tolist()
h,w = img1.shape
pts = np.float32([ [0,0],[0,h-1],[w-1,h-1],[w-1,0] ]).reshape(-1,1,2)
dst = cv2.perspectiveTransform(pts,M)
img2 = cv2.polylines(image2_origin,[np.int32(dst)],True,255,3, cv2.LINE_AA)
else:
print( "Not enough matches are found - {}/{}".format(len(good), MIN_MATCH_COUNT) )
matchesMask = None
print("the number of matches is ", len(matchesMask))
draw_params = dict(matchColor = (0,255,0), # draw matches in green color
singlePointColor = None,
matchesMask = matchesMask, # draw only inliers
flags = 2)
img3 = cv2.drawMatches(image1_origin,kp1,image2_origin,kp2,good,None,**draw_params)
plt.imshow(img3),plt.show()
本文来自博客园,作者:CuriosityWang,转载请注明原文链接:https://www.cnblogs.com/curiositywang/p/15995132.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号