三维重建基础
关于三维重建
前言
-
含义
用相机拍摄真实世界的物体、场景,并通过计算机视觉技术进行处理,从而得到物体的三维模型。英文术语: 3D Reconstruction。
-
应用
自动驾驶,扫地机器人,AI试衣.....
-
研究方法
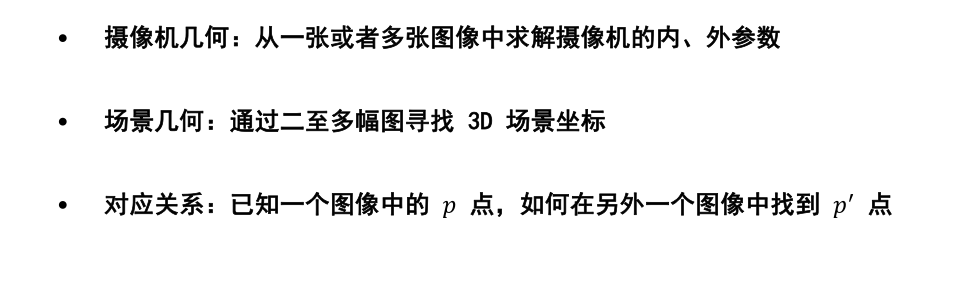
摄像机几何
-
世界坐标系
-
相机坐标系
-
相平面标系
-
像素坐标系
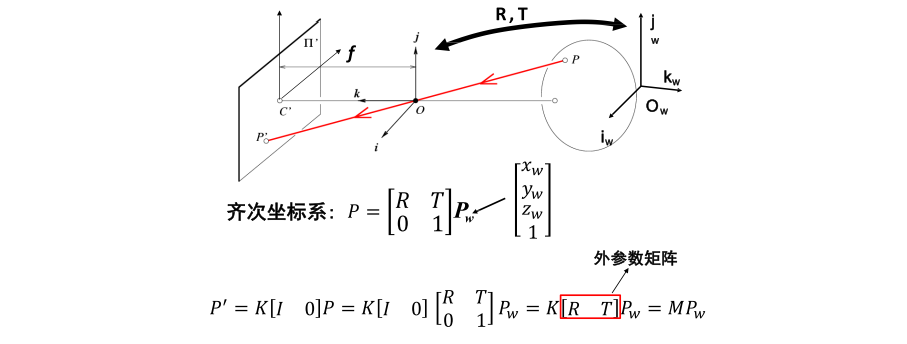
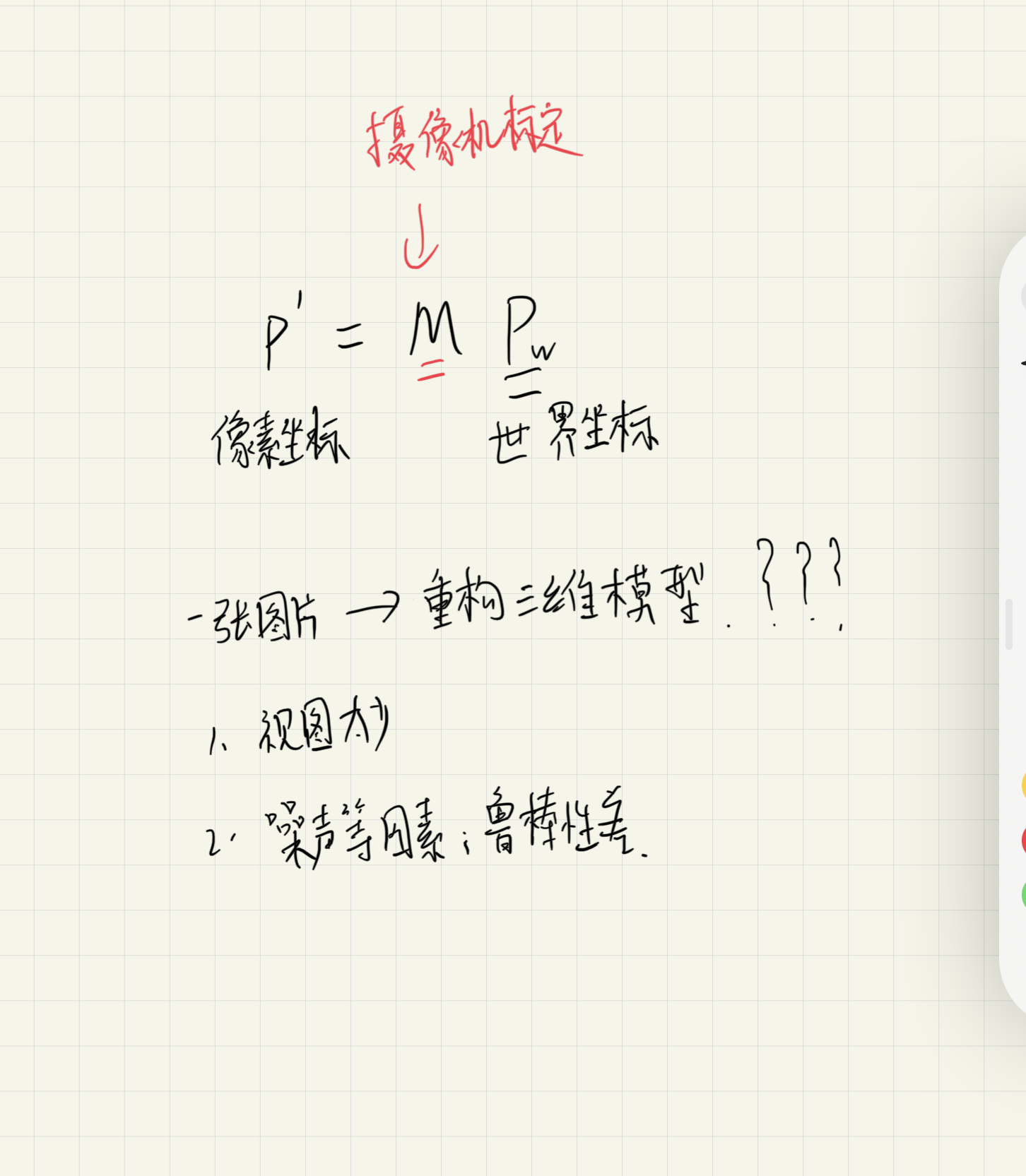
摄像机模型:
\[P^{'} = K[R{\quad}T]P_w = MP_w
\]
摄像机内参数:
\[K=\left[\begin{array}{ccc}
\alpha & -\alpha \cot \theta & c_{x} \\
0 & \frac{\beta}{\sin \theta} & c_{y} \\
0 & 0 & 1
\end{array}\right]
\]
摄像机外参数:
\[[R{\quad} T]
\]
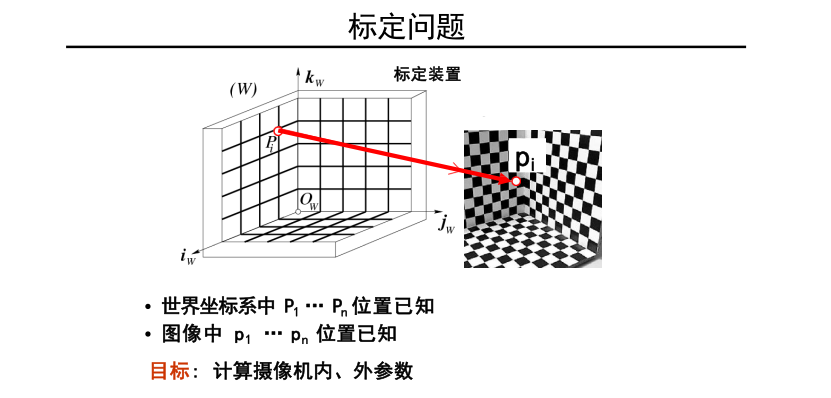
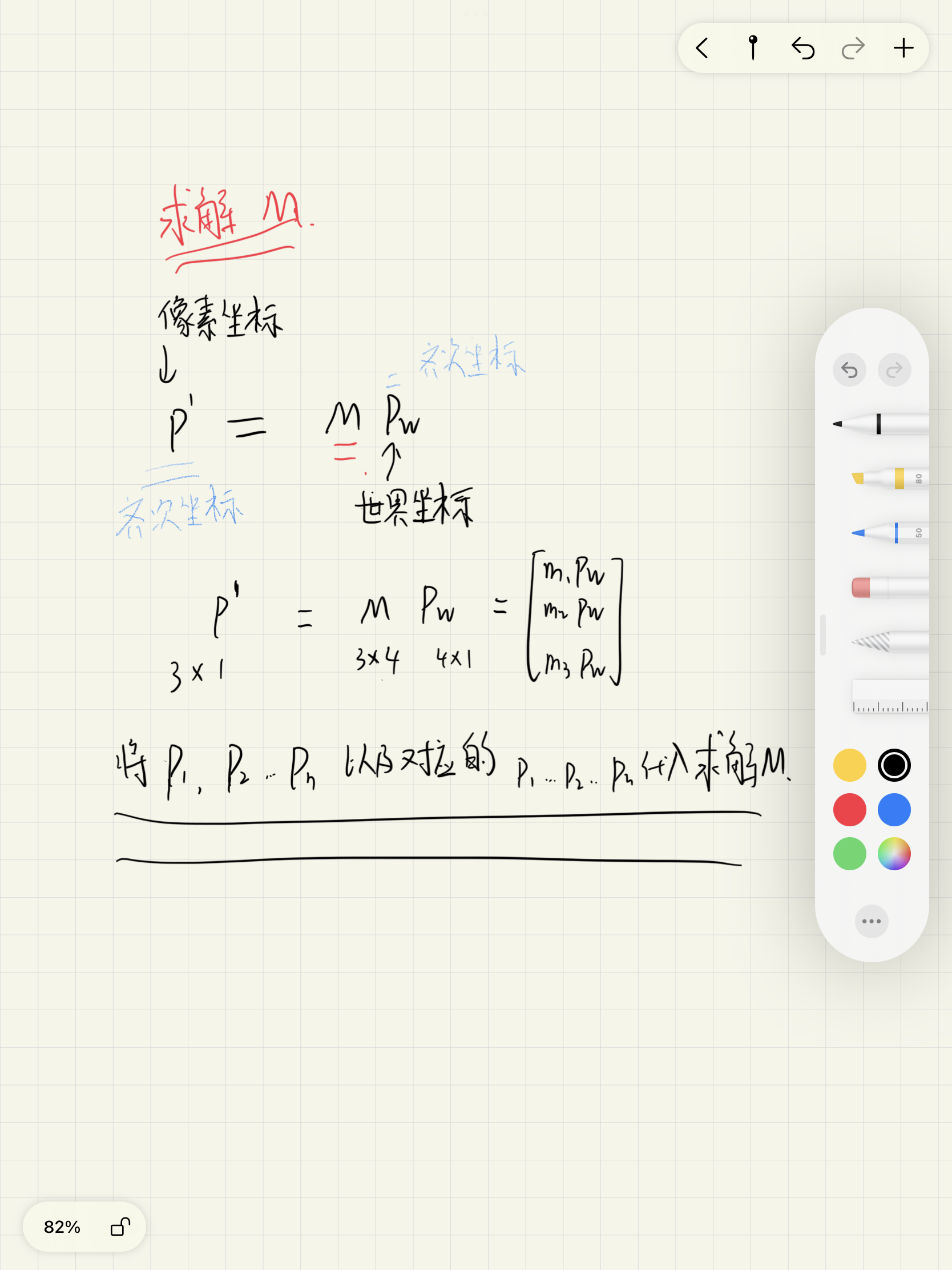
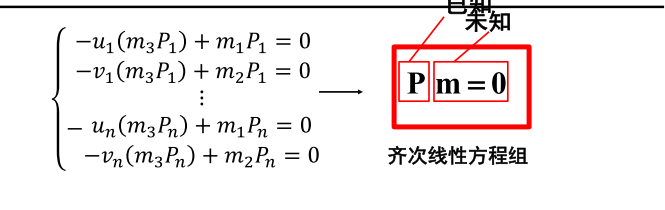
摄像机标定
求解摄像机的内外参数
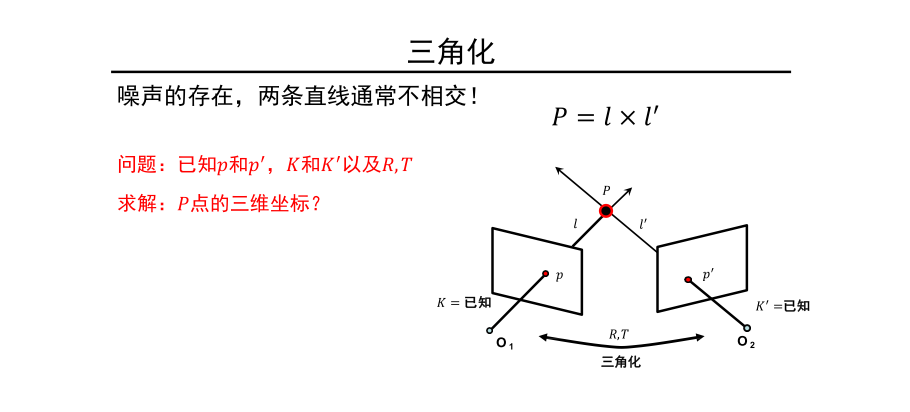
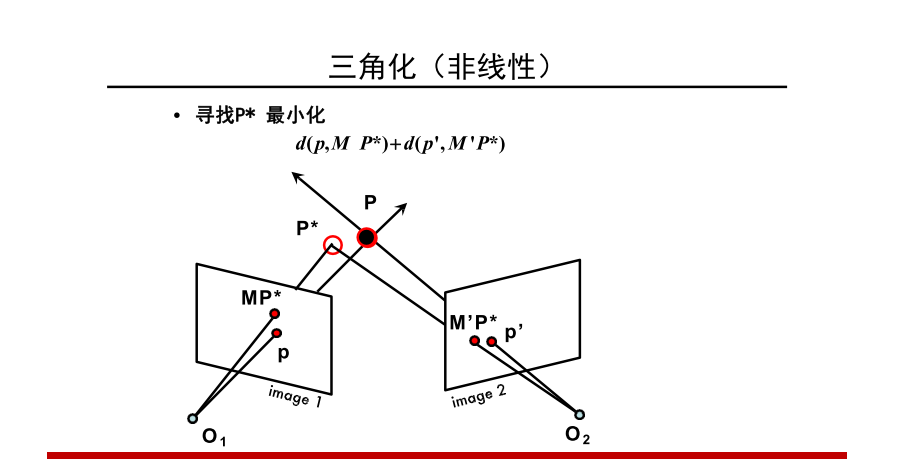
三维重建
讨论:
多视图几何的关键问题
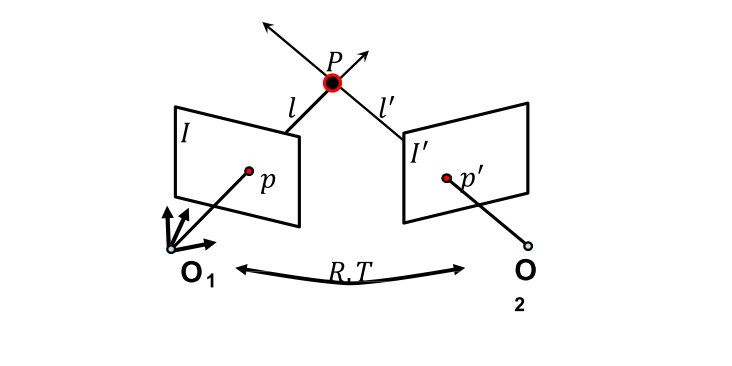
极几何
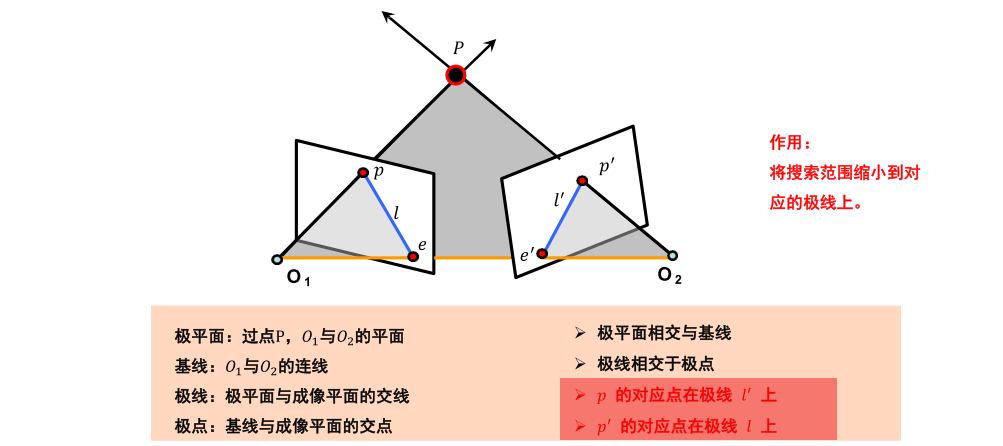
极几何描述了同一场景或者物体的两个视点图像间的几何关系;
本质矩阵
本质矩阵对规范化摄像机拍摄的两个视点图像间的极几何关系进行代数描述;
\[p^{\prime T}[T \times R] p=0
\\
[T \times R] = E
\]
E即本质矩阵,描述了规范化摄像机拍摄的两个视点图像间的极几何关系。
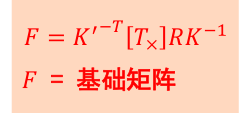
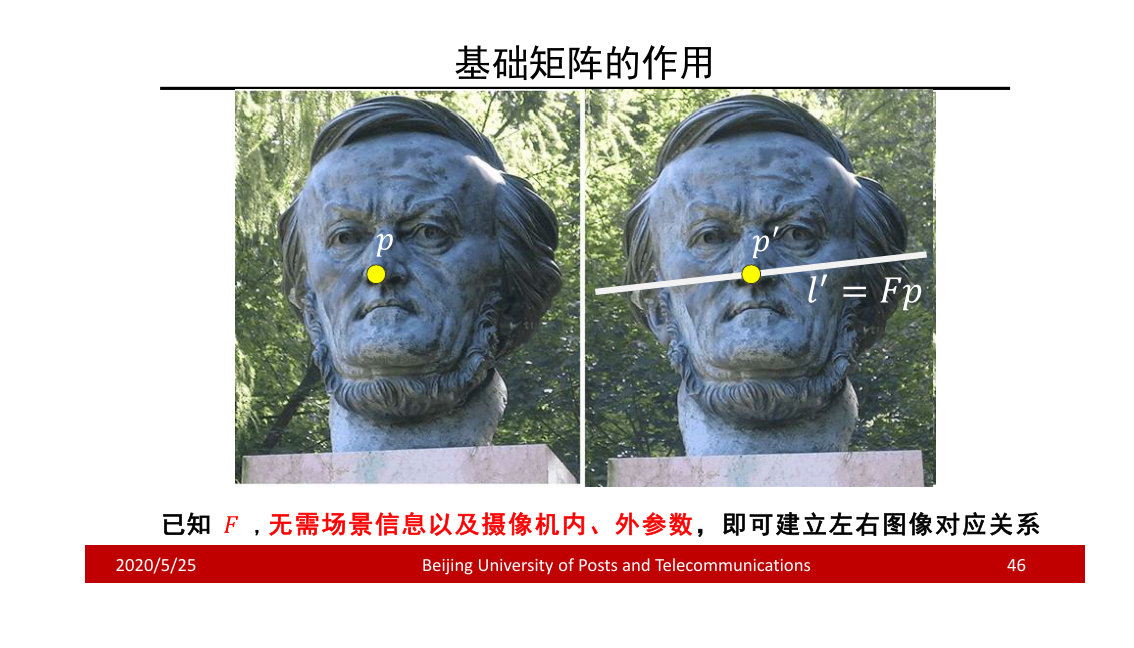
基础矩阵
基础矩阵对一般的透视摄像机拍摄的两个视点的图像间的极几何关系进行代数描述。
\[p^{\prime T} F p=0
\]
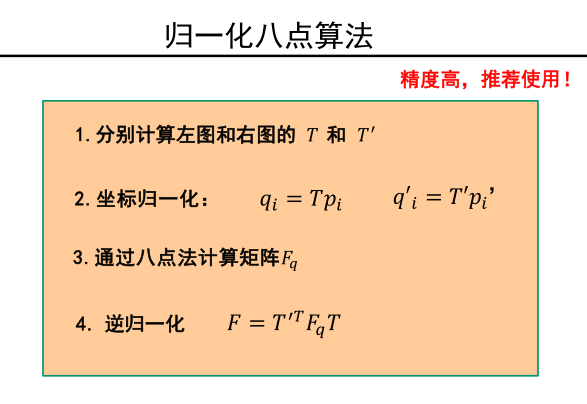
八点法估计基础矩阵
SIFT,SuperPoint等等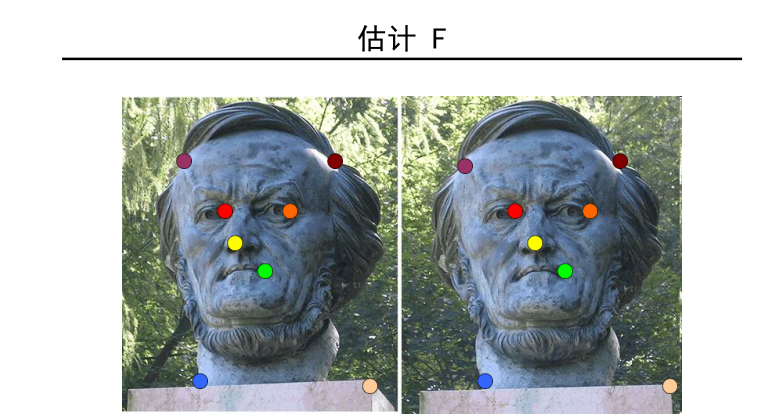
SFM
本文来自博客园,作者:CuriosityWang,转载请注明原文链接:https://www.cnblogs.com/curiositywang/p/15985999.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号