
OPENGL shader 知识点
----
void gluLookAt(GLdouble eyex,GLdouble eyey,GLdouble eyez,GLdouble centerx,GLdouble centery,GLdouble centerz,GLdouble upx,GLdouble upy,GLdouble upz);
该 函数定义一个视图 矩阵,并与当前矩阵相乘。
第一组eyex, eyey,eyez 相机在世界坐标的位置
第二组centerx,centery,centerz 相机镜头对准的物体在世界坐标的位置
第三组upx,upy,upz 相机向上的方向在世界坐标中的方向
你把相机想象成为你自己的脑袋:
第一组数据就是脑袋的位置
第二组数据就是眼睛看的物体的位置
第三组就是头顶朝向的方向(因为你可以歪着头看同一个物体)。
这个说明太形象了
-----
OpenGL仅当3D坐标在3个轴(x、y和z)上都为-1.0到1.0的范围内时才处理它
所以每次赋值都是1/n
顶点着色器 #version 330 core layout (location = 0) in vec3 aPos; // 位置变量的属性位置值为0 out vec4 vertexColor; // 为片段着色器指定一个颜色输出 void main() { gl_Position = vec4(aPos, 1.0); // 注意我们如何把一个vec3作为vec4的构造器的参数 vertexColor = vec4(0.5, 0.0, 0.0, 1.0); // 把输出变量设置为暗红色 } 片段着色器 #version 330 core out vec4 FragColor; in vec4 vertexColor; // 从顶点着色器传来的输入变量(名称相同、类型相同) void main() { FragColor = vertexColor; } 你可以看到我们在顶点着色器中声明了一个vertexColor变量作为vec4输出,并在片段着色器中声明了一个类似的vertexColor。由于它们名字相同且类型相同,片段着色器中的vertexColor就和顶点着色器中的vertexColor链接了。由于我们在顶点着色器中将颜色设置为深红色,最终的片段也是深红色的。
------------------------------------------
经典GLSL入门(建议反复阅读):
https://learnopengl-cn.readthedocs.io/zh/latest/01%20Getting%20started/04%20Hello%20Triangle/
-------------------------------------------
// 0. 复制顶点数组到缓冲中供OpenGL使用 glBindBuffer(GL_ARRAY_BUFFER, VBO); glBufferData(GL_ARRAY_BUFFER, sizeof(vertices), vertices, GL_STATIC_DRAW); // 1. 设置顶点属性指针 glVertexAttribPointer(0, 3, GL_FLOAT, GL_FALSE, 3 * sizeof(GLfloat), (GLvoid*)0); glEnableVertexAttribArray(0); // 2. 当我们渲染一个物体时要使用着色器程序 glUseProgram(shaderProgram); // 3. 绘制物体 someOpenGLFunctionThatDrawsOurTriangle();
---------------------------------------------
片段着色器,它需要一个vec4颜色输出变量,因为片段着色器需要生成一个最终输出的颜色。如果你在片段着色器没有定义输出颜色,OpenGL会把你的物体渲染为黑色(或白色)。
----------------------------------------------
vector shader 送出的是glpostion(4维向量)
---------------------------------------------
我们通过顶点缓冲对象(Vertex Buffer Objects, VBO)管理这个内存,它会在GPU内存(通常被称为显存)中储存大量顶点。使用这些缓冲对象的好处是我们可以一次性的发送一大批数据到显卡上,而不是每个顶点发送一次。从CPU把数据发送到显卡相对较慢,所以只要可能我们都要尝试尽量一次性发送尽可能多的数据。当数据发送至显卡的内存中后,顶点着色器几乎能立即访问顶点,这是个非常快的过程。
--------------------------------------------
每个顶点属性从一个VBO管理的内存中获得它的数据,而具体是从哪个VBO(程序中可以有多个VBO)获取则是通过在调用glVertexAttribPointer时绑定到GL_ARRAY_BUFFER的VBO决定的。(重要!)
这也解释了我们只要在每次绑定VAO即可,不需要重新绑定VBO,因为VBO和VAO一一对应
--------------------------------------------
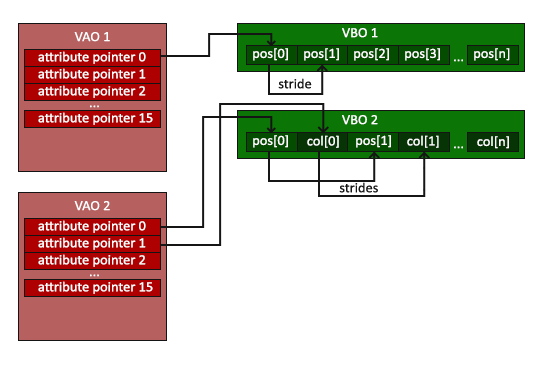
从图中我们可以看出VAO中有16个指针,VBO中存的是几种类型的数据(靠步长区分),那么VAO中就有几个指针(均指向不同类型的首节点)(通过layout postion来设置)
当目标是GL_ELEMENT_ARRAY_BUFFER的时候,VAO会储存glBindBuffer的函数调用。这也意味着它也会储存解绑调用,所以确保你没有在解绑VAO之前解绑索引数组缓冲,否则它就没有这个EBO配置了。
-------------------------------------------
写代码顺序RST(rotate,scale,transform)
实际操作是TSR
-------------------------------------------
不要忘记正z轴是从屏幕指向你的,如果我们希望摄像机向后移动,我们就沿着z轴的正方向移动。
------------------------------------------
有几个地方的深度冲突还是非常明显的。箱子被放置在地板的同一高度上,这也就意味着箱子的底面和地板是共面的(Coplanar)。这两个面的深度值都是一样的,所以深度测试没有办法决定应该显示哪一个。
这就是之前画阴影时候出现混乱的原因,当地平面和阴影深度一样时,不知道生成哪个了,所以要将阴影向上移动一点点。
------------------------------------------
gl_PointSize
可以使用它来设置点的宽高(像素)
需要启用OpenGL的GL_PROGRAM_POINT_SIZE:glEnable(GL_PROGRAM_POINT_SIZE);
每个顶点使用不同的点大小,会在粒子生成之类的技术中很有意思。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号