
强化学习七 - Policy Gradient Methods
一.前言
之前我们讨论的所有问题都是先学习action value,再根据action value 来选择action(无论是根据greedy policy选择使得action value 最大的action,还是根据ε-greedy policy以1-ε的概率选择使得action value 最大的action,action 的选择都离不开action value 的计算)。即没有action value的估计值就无法进行action选择,也就没有Policy,这类方法被称为 value-based methods.其实我们可以直接产生不依赖于action value 的polcy ,这类直接生成action的方法就叫policy-based methods.他们关系如下:
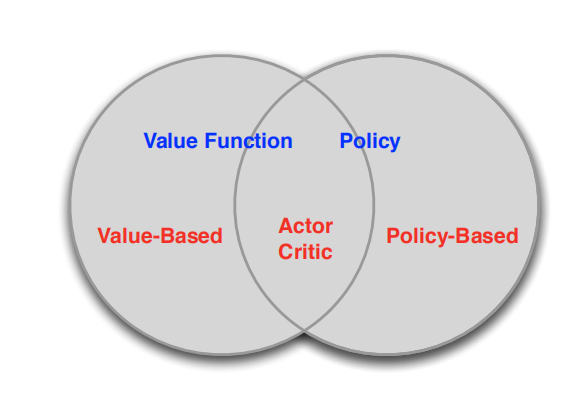
value-based方法,需要计算价值函数(value function),根据自己认为的高价值选择行(action)的方法,如Q Learning。
policy-based方法,不需要根据value function选择action,可以直接得出policy的方法。
图中第三类方法(Actor critic)结合了上述两者,即计算value function,但不直接根据value function选择action,action 由policy-based方法得到。
二. Advantages of Policy-Based RL
Policy-Based RL 的优势:
1)有着更好的收敛性质。Value_Based 方法需要对值函数进行更新,然后才能反映到策略中,而值函数中的一些小小改变可能会使得策略发生较大改变,从而收敛性较差。当然,我们在模型无关的控制(model free)当中说过,如果将探索因子epsilon设定位1/k,则得到的Monte-carlo Contorl是符合GLIE条件的,此时该方法对应的致函数将收敛于最优值函数。Value-Based方法收敛性较差指得是较容易震荡而难以收敛,而后面说的将收敛于最优值函数是指“最终”将收敛于最优值函数。我们并不知道“最终”是多久,所以,Policy-Based在这个问题上更具有优势。
2)在高纬度和连续动作空间上有着逢高的效率。毕竟Value-Based 方法需要计算![]()
如果动作集很大,那么这个max操作的计算量就很大,而Policy-Based RL方法就不存在这种问题。
3)可以学习随机性策略。Value-Based 方法是隐式地对策略进行表示,需要用greedy 方法得到策略,所以学习单的是确定性策略。
Policy-Based 的缺点:
1)通常是收敛到极限;
2)评估策略是低效,高差异的;
举个例子1,在我们所熟知的“石头剪刀布”游戏中,需要寻求纳什均衡,所以并不能弄一个确定性策略,这种情况下,一个均匀的随机策略就是最优的。
举例2:
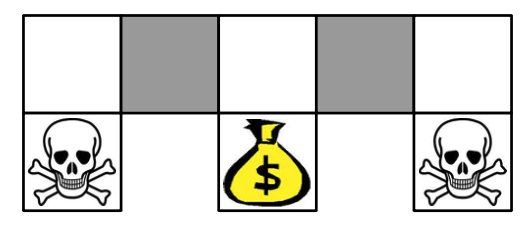
在上面的这个格子世界中,两个灰色方格对于智能体而言并没有什么区别。如果使用一个确定性策略,那么在灰色方格处的决策要么都向左,要么都向右,不管是向左还是向右,都有可能卡住,如下图:
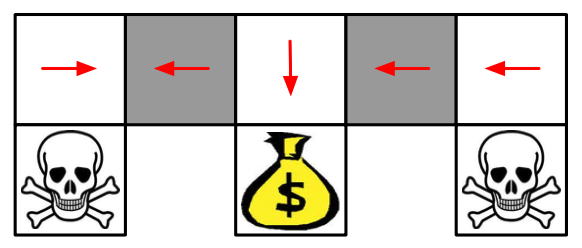
当然,Value-Based方法也可以学习一个near-deterministic(近似确定性)策略,比如说epsilon-greedy,这样的方法虽然不会一直卡住,但是一般需要较长时间才能结束这一episode。课程中有这么一句话:Whenever stochastic policy occurs, a stochastic policy can do better than a deterministic policy。也就是说,一般而言,只要出现随机性策略的时候,一般都会比确定性策略要好。
下面来看一下常用的几个目标函数:
1)episodic环境中,我们使用start value:
![]()
2)continuing环境中,我们使用average value:
![]()
3)continuing环境中,也可以使用average reward per time-step:
![]()
其中d为利用对应策略生成的马尔可夫链的稳态分布。1)中为从某个状态开始,看一下后面将得到的奖励;2)中为continuing环境,所以并没有一个所谓的初始状态
,也没有一个结束状态;3)中表示平稳状态分布下单步的奖励。这三种策略殊途同归,最后都运用到了策略下降方面;
三. Score Function
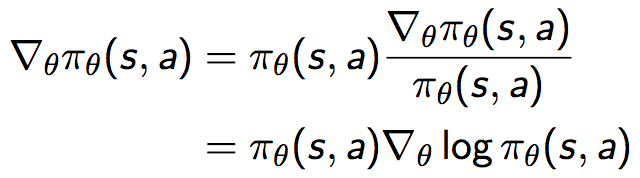
也即策略梯度可以等价地表示为策略乘以一个似然函数的倒数,这个与极大似然操作形式一致的式子叫做Score Function ,表示为:
![]()
下面通过两个例子说明score function:
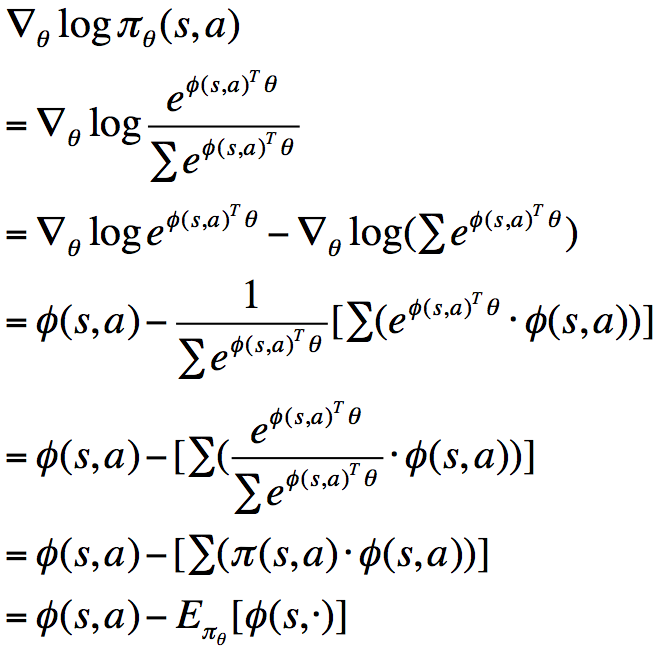
1)softmax policy
首先假设使用线性特征组合![]() 对动作进行加权:
对动作进行加权:
![]()
此时,score function为:
2)同理,我们可以得到服从
![]()
四.one-step MDP
考虑完策略的导数之后,接着我们讨论奖励函数的导数。首先考虑一个简单的one-step MDP:

推导奖励函数的梯度:
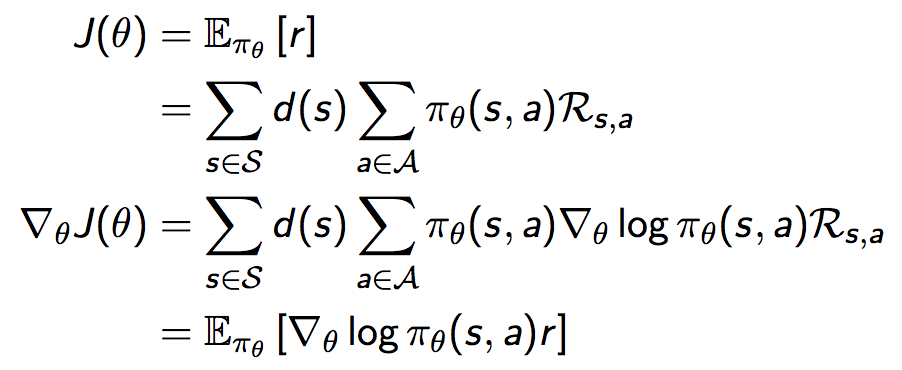
通过选取一个动作来使奖励最大化,选取的正确方法可能取决于状态和动作;
我们通过这个简单的one-step MDP可知,奖励函数的导数等于socre function乘以reward在策略下的期望,也即:

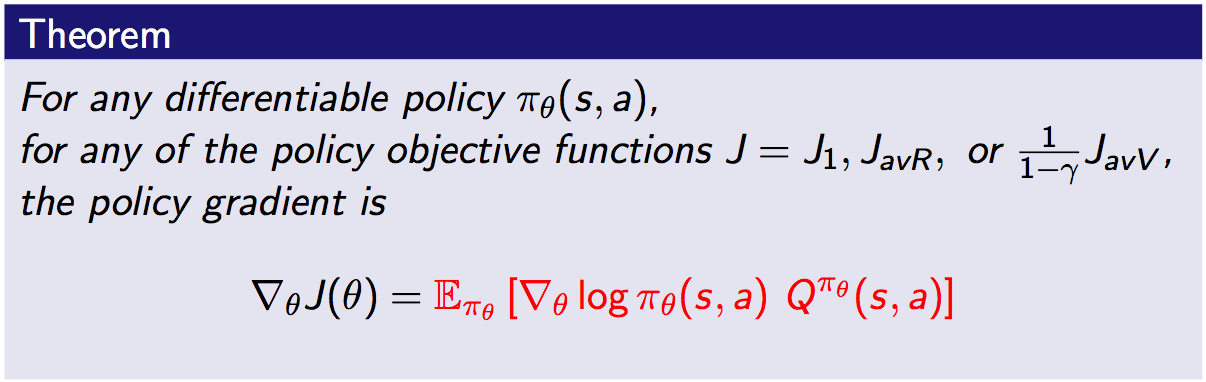
与上面的one-step MDP的情形相比,这里将其拓展到了multi-step MDP,并且将即时奖励r替换为了long-term值函数,这一定理非常重要。我们知道,我们对于策略参数的更新都是沿着极大化奖励函数的方向进行的,所以由上式我们可以对参数进行更新。
接下来将将该定理结合model-free情形进行使用,得到REINFORCE算法:
五.Monte-Carlo Policy Gradient (REINFORCE)

其想法非常简单,就是将奖励函数的梯度中的期望换为采样,在一个episode结束之后,利用该episode中的每一个step对参数进行更新。不过这个算法中对于的估计使用的是回报(return),这是一个无偏估计,但是却有着较大的方差,所以,我们考虑换成其他方法对值函数进行逼近,比如说利用神经网络或其他参数化方法,记参数为w(此处可回想DDPG算法形式):
![]()
我们称之为Critic,并将上面的参数化策略称为Actor,将这二者结合起来,叫做Actor-Critic算法:

对于参数w的更新,我们可以将回报(return)或者TD target作为目标,最小化当前值函数与目标的平方。此外,在Actor-Critic算法中,我们可以在每个step对策略进行更新,而不用像REINFORCE一样,只能在每个episode运行完成之后进行更新。因为这里每个step我们可以使用对奖励进行估计,然后代入上面的式子,对策略进行更新,而REINFORCE使用回报(return)决定了它不能实时更新。
Actor-Critic算法虽然降低了方差,但是一般来说是有偏的,因为在approximating(逼近)的时候引入了bias(误差)。那是否能够通过恰当地选择值函数估计器来避免引入bias呢?这是可以的。由此我们引出兼容函数估计(Compatible Function Approximation)
考虑条件1中提到的式子,用语言表述为:“score function = the gradient of Critic”,将其代入到中,可得:
![]()
比方说,在某个状态s和动作a下,假设
沿着
越大,如果
朝着
前面我们说过,为了降低REINFORCE算法的方差,我们引入了Critic,现在,我们进一步使用Baseline来降低RL中的方差。首先我们可以推导出如下式子:
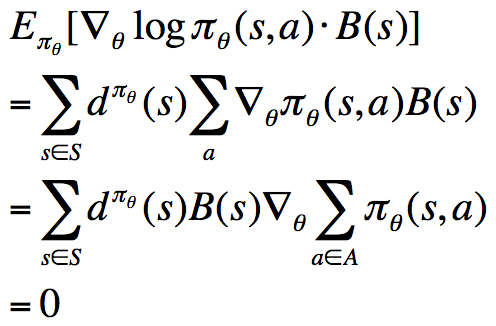
该式表明,对于某一个与动作a无关的基准函数B(s),它乘以score function之后,计算在策略下的期望,结果为0。换句话说,我们可以在奖励函数的梯度的基础上任意的增减一个这样的式子,而保持梯度不变。一个不错的Baseline函数就是值函数,在原奖励函数梯度的计算式上减去该值,得到:![]()
我们称

优势函数的意义是,在动作值函数的基础上减去了对应状态拥有的基准值,使之变为动作带来的增益,因而降低了方差(降低了由于状态基准值的抖动引起的方差)。
现在我们给出的计算优势函数的公式是理论上的,或者说是策略对应的真实优势函数,但实际上,我们并不知道该函数,因而只能对其进行估计,就像我们前面估计状态值函数和动作值函数一样:
我们可以不断地更新以及
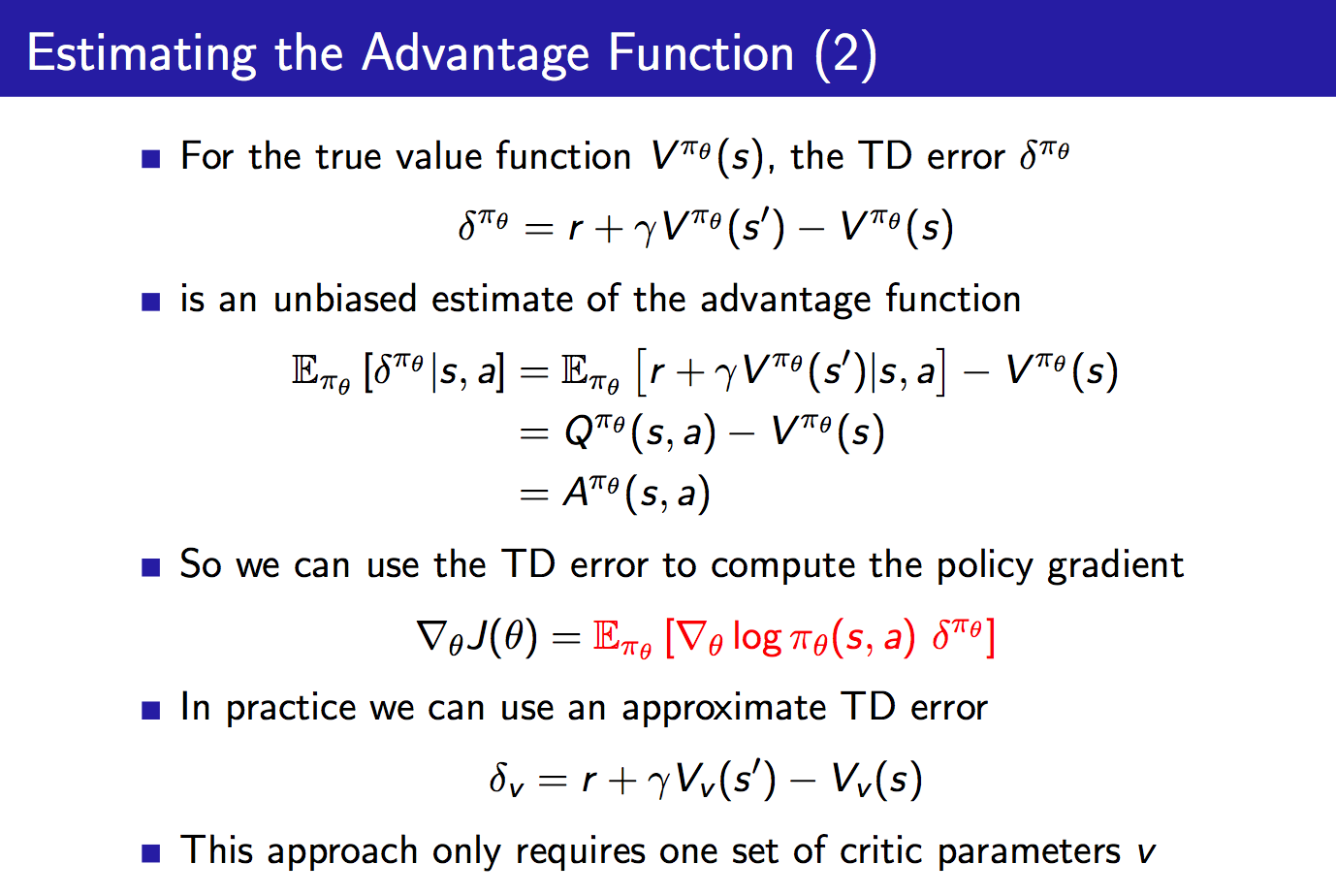
δπθ=reward+下一个状态真实价值折扣-现在所处的状态;
其中最为重要的结论是:“如果我们使用真实的状态值函数来计算TD error,则TD error为优势函数的一个无偏估计”。并且,在这种方法中,我们仅需一组参数就能够对优势函数进行估计。
最后我们介绍一下自然策略梯度:
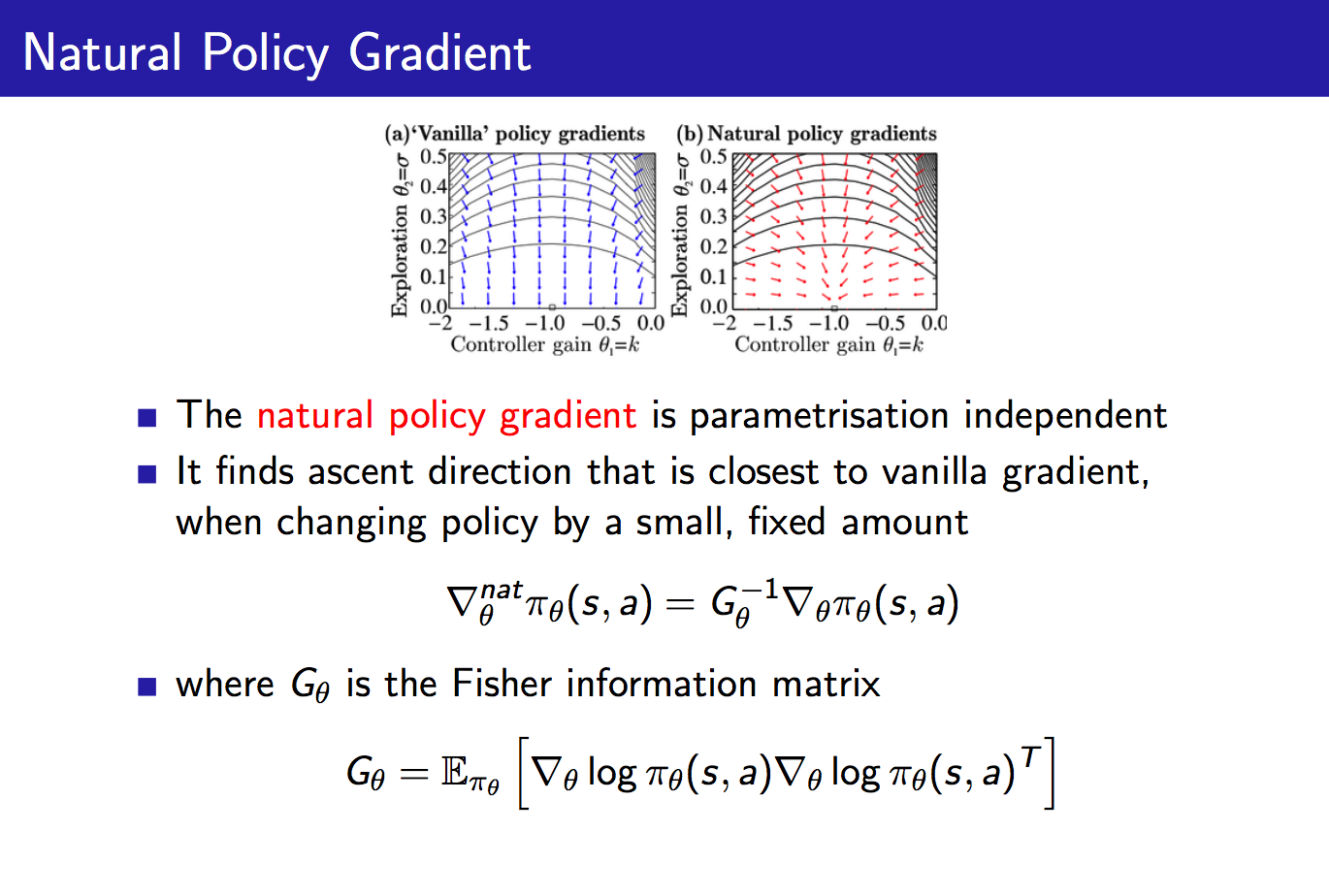
自然策略梯度也即直接对原始策略梯度进行修正,乘以一个Fisher信息阵。这样做有什么用处呢?它使得策略梯度变成参数化无关的了。举个例子,对于一个softmax策略,我们增大其中所有动作的score,此时各个动作的概率并不会发生改变,这可以通过其score function来考虑。
![]()
比方说,我们反过来想,成比例的增大策略中各个动作对应的分子,因为softmax策略中的分母也会成比例的增大,所以最终各个动作的概率并没有发生改变。如果这里我们是通过增加![]() 来增加分子的值的,所以上面的score function也可能会随之增大,这样的话,虽然该策略各个动作对应的概率没有变,但是下一步对于策略的改进却发生了改变(想想对于策略参数的更新公式),这并不是我们想看到的。而自然策略梯度可以很好地解决这一问题,对于刚刚提及的这种情形,Fisher信息阵也将增大,从而使得下一步对于策略的改进与重新参数化无关,就很开心了。
来增加分子的值的,所以上面的score function也可能会随之增大,这样的话,虽然该策略各个动作对应的概率没有变,但是下一步对于策略的改进却发生了改变(想想对于策略参数的更新公式),这并不是我们想看到的。而自然策略梯度可以很好地解决这一问题,对于刚刚提及的这种情形,Fisher信息阵也将增大,从而使得下一步对于策略的改进与重新参数化无关,就很开心了。
将自然策略梯度与Actor-Critic结合,得到Natural Actor-Critic如下:
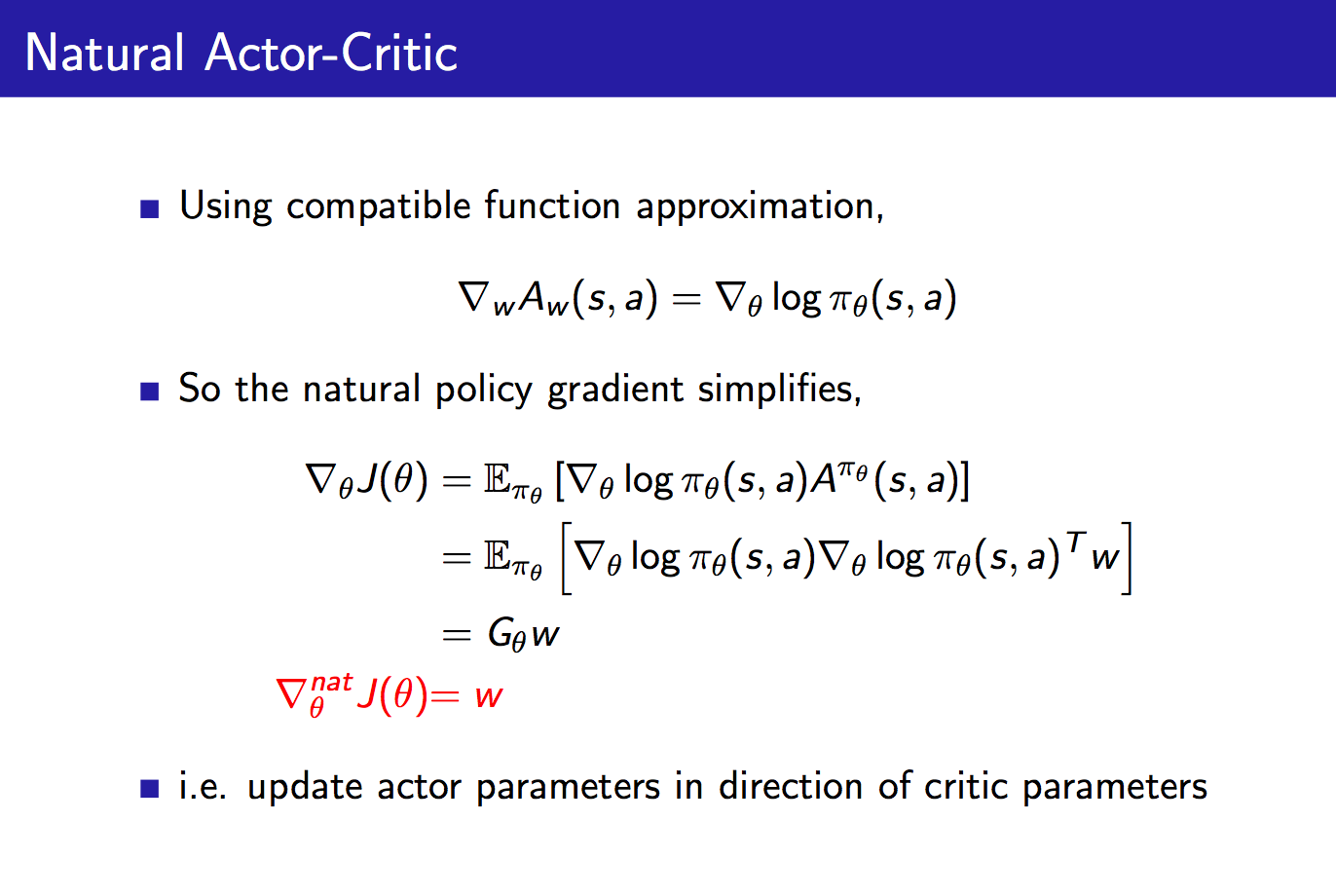
在上面的推导中,我们可以将compatible function approximation积分代入对于奖励函数的求导中,得到最终的奖励函数的自然梯度,发现它就等于Critic的参数w,这并不是巧合,当我们结合natural policy gradient + compatible function approximation(自然策略梯度+相容函数逼近)之后,就可以得到这一结论:对Actor参数的更新就等于Critic的参数。
总结:
本章阐述了value-based methods和policy-based methods的优缺点,引入了性能函数J(θ) ,介绍了PG定理,并详细介绍了episode case下的PG方法:REINFORCE 、REINFORCE-with-baseline(减小偏差,但方差较大)。介绍了结合PG 和value-based methods的Actor-Critic Methods,以及 continuing case下的PG。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号