ABB机器人做EIP从站配置
1机器人需要有选项841-1EthernetIP scanner/adapter选项,此时可以连接LAN3或者WAN口,或者使用840-1 Ethernet/ip Anybus adapter ,使用anybus网口
以下举例为841-1选项
2控制面板-配置 ,主题选择communication
3进入IP SETTING,编辑已有Ethernet/ip 网络ip地址,并选择网口,此处举例LAN3口
4 进入IO 主题,Industry Network,找到EthernetIP,connection选择刚设置过的网口
4控制面板-配置下-进入EtherNet/IP Internal Device
5 进入后点击编辑,修改输入输出字节数
6配置signal
7 机器人从站的EDS可以通过如下路径获得
打开Robotstudio,Add-in下右击如下
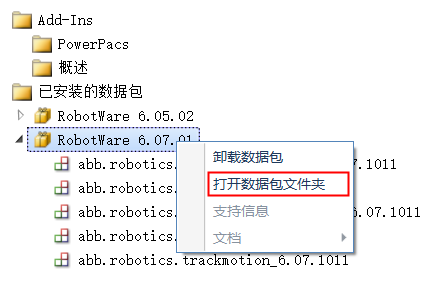
8路径如下
…\ABB.RobotWare-6.05.0129\RobotPackages\RobotWare_RPK_6.05.0129\utility\service\EDS
找到enip.EDS
若使用840-1选项,anybus 的eds文件为ENIP_FA.eds

 浙公网安备 33010602011771号
浙公网安备 33010602011771号