埃斯顿机器人编程实例 (取板机械手)
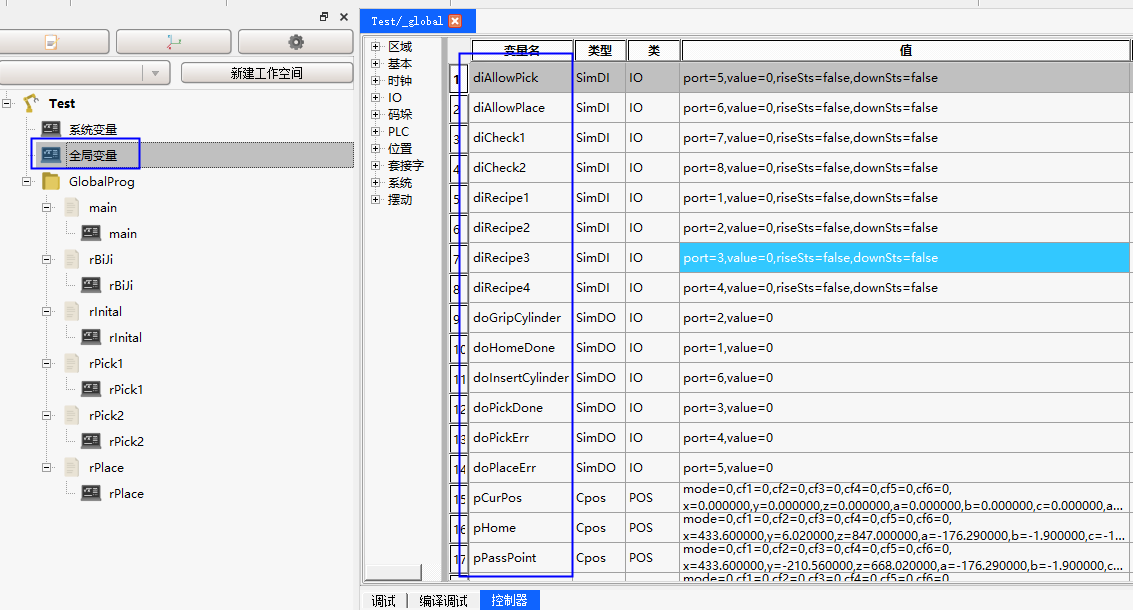
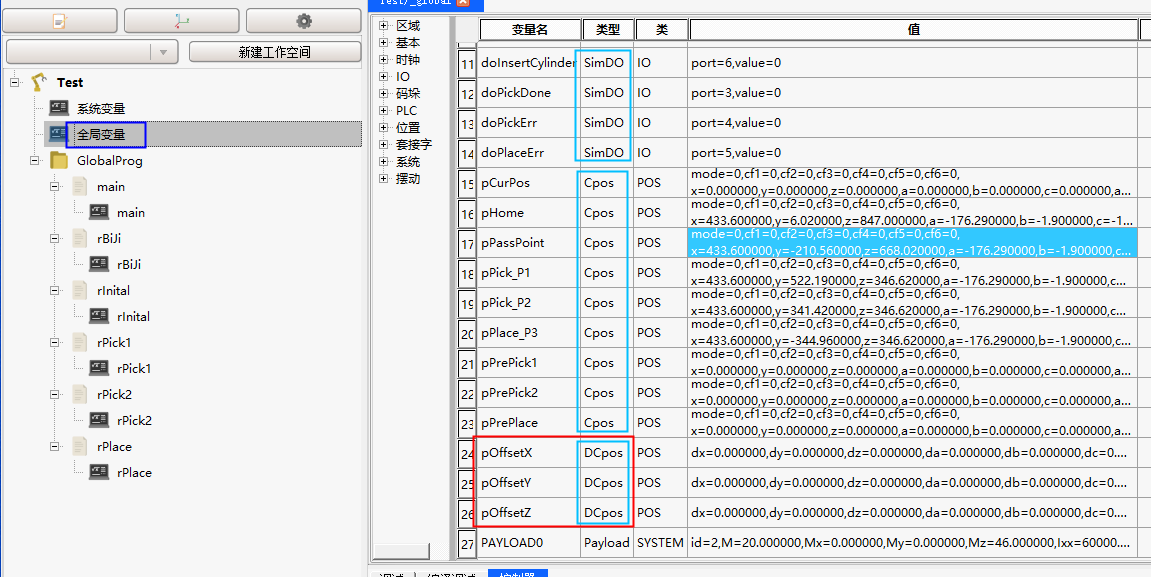
1, 变量定义 (此处都定义为全局变量)
2, 以下内容为具体程序
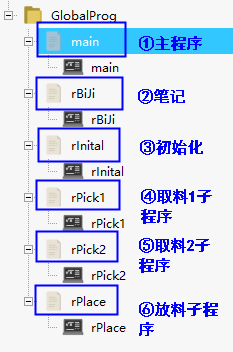
①主程序
Start: //初始化 CALL rInital WHILE (true) DO CALL rPick1 CALL rPlace CALL rPick2 CALL rPlace ENDWHILE End;
②笔记
Start: MovJ(g:pHome,s:V100,"RELATIVE",s:C10,s:nullTool,s:World,g:PAYLOAD0) MovL(g:pHome,s:V100,"RELATIVE",s:C10,s:nullTool,s:World,g:PAYLOAD0) //工件坐标基础上偏移 MovLRel(g:pOffsetX,"COORD",s:V100,"RELATIVE",s:C10,g:PAYLOAD0) MovLRel(g:pOffsetX,"COORD",s:V100,"RELATIVE",s:C10,g:PAYLOAD0) MovLOffset(g:pPick_P1,g:pOffsetZ,"COORD",s:nullTool,s:World,s:V100,"RELATIVE",s:C10,g:PAYLOAD0) //设置负载质量 SetPayload(g:PAYLOAD0) //全局速度设置功能。设置“全局速度”为一个合适的百分比数值 SetOverRide(20) //选择用户坐标系指令 SetCoord(s:World) //选择工具坐标系指令 SetTool(s:nullTool) //6轴回原 RefRobotAxis(1,0) RefRobotAxis(2,0) RefRobotAxis(3,0) RefRobotAxis(4,0) RefRobotAxis(5,0) RefRobotAxis(6,0) //点位赋值 g:pHome = g:pPick_P1 g:pHome.z = 640 //一直等待一个条件 WaitSimDI(g:diAllowPick,1,0,0,l:INT0) //获取当前位置 GetCurCPos(g:pCurPos) //and, or等逻辑语句使用 IF (g:diCheck1.value == 0 or g:diCheck2.value == 0) THEN PulseSimOut(g:doPickErr,1,1000,0) Stop() ENDIF End;
③初始化
Start: SetSimDO(g:doHomeDone,0) SetSimDO(g:doGripCylinder,0) SetSimDO(g:doInsertCylinder,0) SetSimDO(g:doPickDone,0) SetSimDO(g:doPickErr,0) SetSimDO(g:doPlaceErr,0) //X方向偏移变量????? g:pOffsetY.dx = 0 g:pOffsetY.dy = 150 g:pOffsetY.dz = 0 g:pOffsetY.da = 0 g:pOffsetY.db = 0 g:pOffsetY.dc = 0 //Z方向偏移变量????? g:pOffsetZ.dx = 0 g:pOffsetZ.dy = 0 g:pOffsetZ.dz = 50 g:pOffsetZ.da = 0 g:pOffsetZ.db = 0 g:pOffsetZ.dc = 0 g:pPrePick1 = g:pPick_P1 g:pPrePick1.z = g:pPick_P1.z + 50 g:pPrePick2 = g:pPick_P2 g:pPrePick2.z = g:pPick_P2.z + 50 g:pPrePlace = g:pPlace_P3 g:pPrePlace.z = g:pPlace_P3.z + 100 MovLRel(g:pOffsetZ,"COORD",s:V100,"RELATIVE",s:C10,g:PAYLOAD0) MovJ(g:pPassPoint,s:V100,"RELATIVE",s:C10,s:nullTool,s:World,g:PAYLOAD0) MovJ(g:pHome,s:V100,"FINE",s:nullTool,s:World,g:PAYLOAD0) PulseSimOut(g:doHomeDone,1,1000,0) Stop() //WaitSimDI(g:diAutoRun,1,0,0,l:INT0) End;
④取料1子程序
Start: //等待取料 MovJ(g:pPrePick1,s:V500,"RELATIVE",s:C10,s:nullTool,s:World,g:PAYLOAD0) WaitSimDI(g:diAllowPick,1,0,0,l:INT0) //取料进行中 MovL(g:pPick_P1,s:V100,"FINE",s:nullTool,s:World,g:PAYLOAD0) SetSimDO(g:doGripCylinder,1) SetSimDO(g:doInsertCylinder,1) Wait(500) //取料完成 MovL(g:pPrePick1,s:V200,"FINE",s:nullTool,s:World,g:PAYLOAD0) IF (g:diCheck1.value == 0 or g:diCheck2.value == 0) THEN PulseSimOut(g:doPickErr,1,1000,0) Stop() ENDIF End;
⑤取料2子程序
Start: //等待取料 MovJ(g:pPrePick2,s:V500,"RELATIVE",s:C10,s:nullTool,s:World,g:PAYLOAD0) //取料进行中 MovL(g:pPick_P2,s:V100,"FINE",s:nullTool,s:World,g:PAYLOAD0) SetSimDO(g:doGripCylinder,1) SetSimDO(g:doInsertCylinder,1) Wait(500) //取料完成 MovL(g:pPrePick2,s:V200,"FINE",s:nullTool,s:World,g:PAYLOAD0) MovLRel(g:pOffsetY,"COORD",s:V200,"RELATIVE",s:C10,g:PAYLOAD0) IF (g:diCheck1.value == 0 or g:diCheck2.value == 0) THEN PulseSimOut(g:doPickErr,1,1000,0) Stop() ENDIF //取料完成交互 SetSimDO(g:doPickDone,1) WaitSimDI(g:diAllowPick,0,0,0,l:INT0) SetSimDO(g:doPickDone,0) End;
⑥卸料子程序
Start: MovJ(g:pPassPoint,s:V500,"RELATIVE",s:C10,s:nullTool,s:World,g:PAYLOAD0) MovJ(g:pPrePlace,s:V500,"RELATIVE",s:C10,s:nullTool,s:World,g:PAYLOAD0) //等待允许放料 WaitSimDI(g:diAllowPlace,1,0,0,l:INT0) MovJ(g:pPlace_P3,s:V200,"FINE",s:nullTool,s:World,g:PAYLOAD0) SetSimDO(g:doInsertCylinder,0) SetSimDO(g:doGripCylinder,0) Wait(300) MovL(g:pPrePlace,s:V500,"RELATIVE",s:C10,s:nullTool,s:World,g:PAYLOAD0) MovJ(g:pPassPoint,s:V500,"RELATIVE",s:C10,s:nullTool,s:World,g:PAYLOAD0) End;

 浙公网安备 33010602011771号
浙公网安备 33010602011771号