ABB机器人碰撞检测设置
关于 ABB工业机器人碰撞检测功能的介绍

ABB工业机器人碰撞检测功能介绍
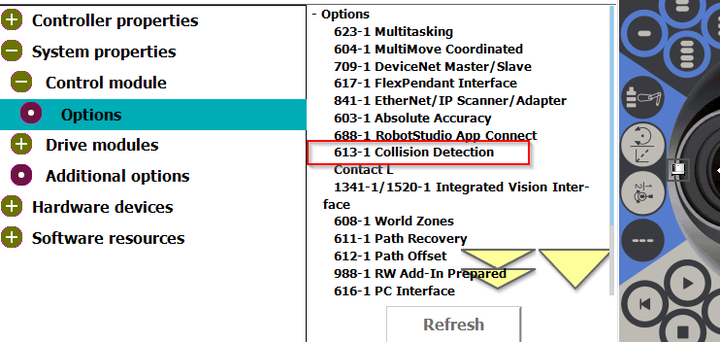
软件选项号:
[613-1] Collision Detection
简介:
主要功能:
Collision Detection 碰撞检测的主要作用是减少碰撞力对机器人本体的影响,避免机器人本体或者外围设损坏。
它比一般地运动侦测功能更为灵敏,当碰撞发生时,机器人会立即停止,并沿之前的行走路径往反方向移动一小段距离以释放残余应力。当碰撞报警被确认之后,不需要重新上电,机器人就可以继续沿着之前的路径继续工作。
选项所包含的内容:
- 用来定义开关功能及调整敏感度的系统参数(全局)
- 可在线调整敏感度的指令: MotionSup (局部)
敏感度 (Motion Supervision Level)默认值100%,最大值300%。数值越大敏感度越低。
Collision Detection 功能可调可开可关,取决于客户实际需要。
举例:
有些客户出于严格的安全要求会提高敏感度 (调到75%);
有些则会因为载荷的质量或者惯量较大,嫌碰撞检测因太敏感而频繁报错,所以将敏感值调低(比如调到200%);
还有一些为了能违规使用,比如安装超限的载荷,而将其关闭。(5Kg的型号装了8Kg的,或者有外力持续作用)
局限性:
- Collision Detection 的侦测基于模型,所以为了能正常的工作,机器人的负载Payload必须定义成与实际一样。通常我们推荐使用ABB预置的 Load Identification 指令来更新载荷参数。
- 不适用于导轨及外轴;
- 当机器人至少有一个轴是以独立轴的模式运转的时候,Collision Detection 是无效的;
- 当软伺服模式开启的时候,Collision Detection可能会误报,所以通常如果开起了软伺服模式,需要将 Collision Detection关闭。
- 如果指令 MotionSup 被用来关闭 Collision Detection 功能,则它只会生效一次,其在系统输出的信号值会在机器人启动前被临时改为随机值;
- 如果低速下的碰撞反复发生,机器人可能会因为没有充分的移动距离而无法彻底地释放残余应力。在这种情况下,推荐临时关闭 Collision Detection 并将机器人手动Jog到远离碰撞点的位置,再继续工作;
- 如果在程序运行中发生了强烈的碰撞,有时候反向运动会等几秒后再进行;
关于碰撞
安装 Collision Detection后, 碰撞时会发生什么?
当碰撞发生时,机器人会立即停止,并沿之前的行走路径往反方向移动一小段距离以释放残余应力。程序停止运行并显示错误报警。机器人依然保持上电,从而使机器人在确认报错信息后可以继续工作。
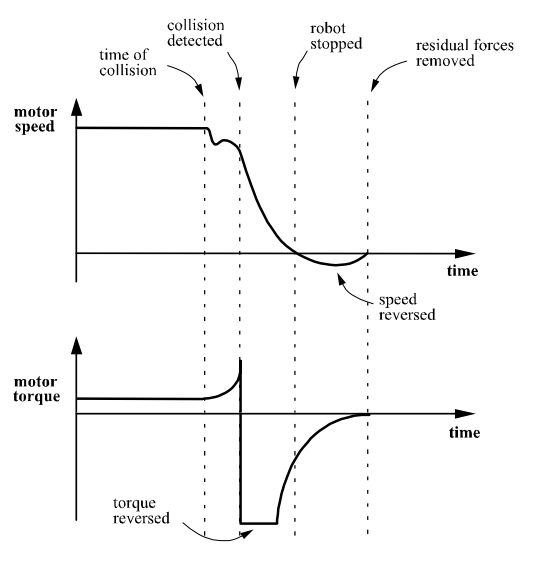
 碰撞示意图
碰撞示意图
碰撞前后的速度及力矩图:
系统参数配置
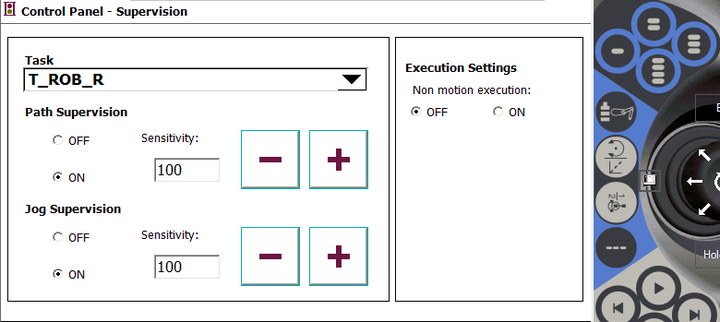 控制面板- 监控界面
控制面板- 监控界面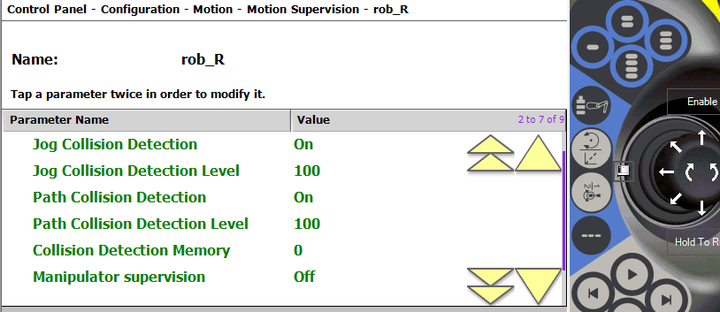 参数配置界面
参数配置界面
Path Collision Detection
按执行程序时的需要来打开或关闭碰撞检测。
Jog Collision Detection
按点动时的需要来打开或关闭碰撞检测。
Path Collision Detection Level
按百分数修改监控等级。数值越大,敏感度越低。默认值100%。
Jog Collision Detection Level
按百分数修改点动时所需的监控等级。数值越大,敏感度越低。默认值100%。
Collision Detection Memory
定义碰撞后的机器人要沿相关路径反向移动多远(以秒为单位)。与低速机器人相比,碰撞前移动较快的机器人会移动得更远。
Manipulator Supervision:
仅适用于IRB 340和IRB 360, 用来打开或关闭松臂检测监控。
Manipulator Supervision Level
仅适用于IRB 340和IRB 360, 用来修改松臂检测的监控等级。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号