
2.2 优化算法
1. mini-batch梯度下降法
size=m:退化为batch,当训练样本过多时,单次迭代需要处理过多的训练样本
size=1:随机梯度下降法,产生大量噪声(但通过减小学习率,噪声可以减少),缺点是失去了向量化带来的加速。
使用mini-size,每次遍历所有样本时,可以进行m/size次梯度下降
选取原则:
训练集较小时(<2000),直接使用batch梯度下降
一般的mini-batch大小为64-512
(另:选取大小要与CPU/GPU内存相符
2.momentum
2.1 指数加权平均
$v_{t}=\beta v_{t-1}+(1-\beta)\theta_{t}$
修正偏差:为了解决最开始迭代时,$v_{t}$低于真实值,额外引入一个偏差修正
$v_{t}=\frac{\beta v_{t-1}+(1-\beta)\theta_{t}}{1-\beta^{t}}$
2.2 momentun 梯度下降

如图,为了使得每次梯度下降时的走向不像蓝线那样有很多的纵向分量,而希望走向像红线一样更多的是横向分量,我们引入了momentun梯度下降
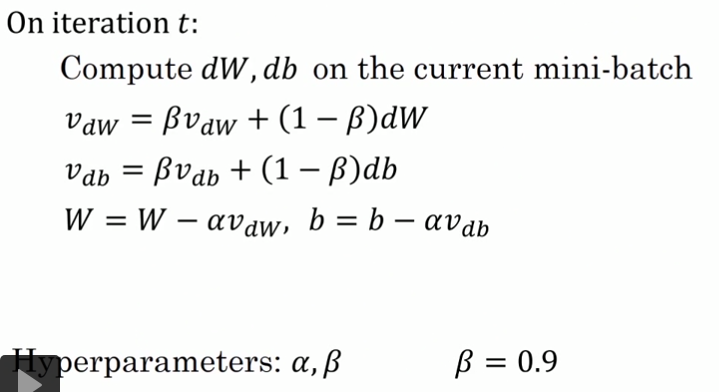
作者建议一般将参数$\beta$设为0.9
3. RMSprop
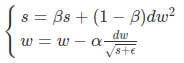
β的典型值是0.999。公式中还有一个ϵ,这是一个很小的数,典型值是10^-8
4.Adam

β1=0.9,β2=0.999,ϵ=10^−8。Adam算法相当于先把原始梯度做一个指数加权平均,再做一次归一化处理,然后再更新梯度值。
只需调整不用的$\alpha$
5.作业
1.mini-batch
Shuffling and Partitioning.建立mini-batch通常需要洗牌和划分两个步骤
2. momentum
初始化:$v_{dW}^{[l]},v_{db}^{[l]}$
迭代: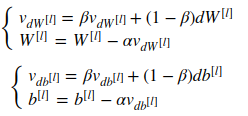
3.Adam
初始化:$v_{dW}^{[l]},v_{db}^{[l]},s_{dW}^{[l]},s_{db}^{[l]}$
迭代: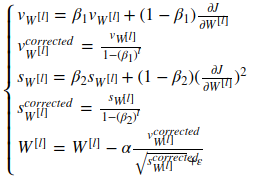

 浙公网安备 33010602011771号
浙公网安备 33010602011771号