
开环观测器
局限性:如果矩阵A渐进稳定, ,然而矩阵A由系统内部决定,当系统矩阵A不稳定时,状态观测量将无法有效跟踪实际状态量。
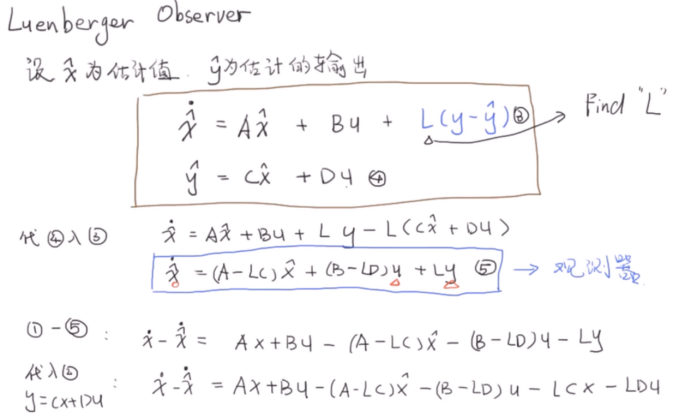
龙伯格观测器
Luenberger observer为闭环观测器的一种,其基本原理为:通过在原系统基础上添加基于输出误差的校正项来构造状态方程及输出方程,方程如下所示:
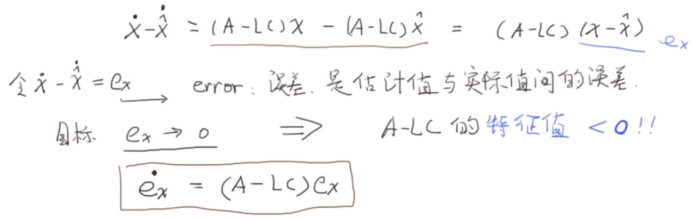
如果需要使估计误差趋于0 ,则矩阵 的所有特征根(即极点)需要在负半轴。这时我们可以根据特征根来求得矩阵
,进而获得该Observer的设计。
通过上式可以看出估计误差是指数收敛的。尽管当时间趋于无穷时,估计误差会无限接近0,但始终不会等于0。所以说龙伯格观测器是渐近地估计系统的状态,观测器系统的收敛时间不受控制。
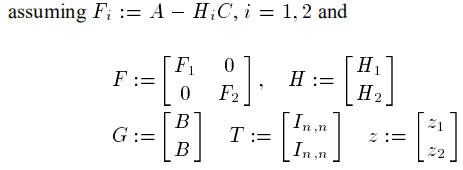
有限时间观测器
一个有限时间观测器可以用两个龙伯格观测器来构造:
![]()
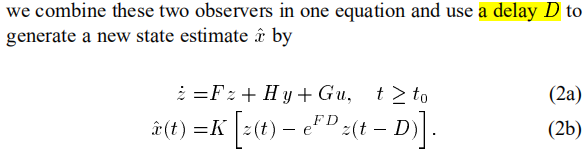
(2a)和(2b)可以用下面的框图来表示:
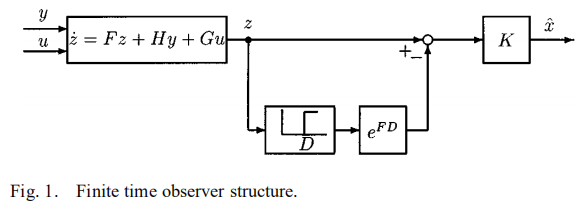
通过按照下面的方法选择特定的待设计参数(H、D、K),我们可以保证在估计时间超过D后,误差严格为0。
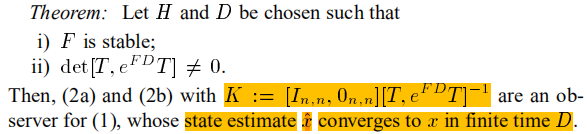

所以说有限时间观测器系统可以设置任意的时间参数,保证在有限时间内收敛。尽快达到稳定状态。
降维观测器
降维观测器与全维观测器的不同之处在于,全维观测器的输入u一定是输入系统的实际控制变量,而降维观测器则为了减少系统状态个数,而将某部分可测量的状态作为系统输入u来处理,这样的好处在于减小嵌入式系统的计算复杂度,提高计算速度。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号