
摘要:本文描述了两种状态重构算法,使用了被稀疏且任意的“噪声”破坏的测量数据来估计状态。我们的出发动机是保护信息物理系统,以免受到来自恶意对手的传感器攻击。第一个算法从一批传感器测量中重构状态,而第二个算法被构造为龙伯格观测器的形式,能够及时使用最新的测量数据。这些算法的一个显著亮点是使用事件触发技术来提高计算性能。
关键词:事件触发观测器、安全信息物理系统、安全状态重构、传感器攻击。
系统模型:
考虑以下线性离散时间控制系统:

将一段采样后的输出方程写成增广形式:
构造下面的最优化问题:
显然,上式的最小值为0,且当Y=Qz时才会取到。另外,我们注意到Q矩阵的形状是水平长条(变量数少于约束数),根据线性代数的知识,我们可以判断Y=Qz的解有多个。所以若不加以约束,上式无法求解。下面的定理3.2解决了这一问题:
定理3.2说明,“问题2.3有唯一解”和“系统2s稀疏能观”这两个命题之间是等价的。下面是证明思路:
1、首先,最优问题有唯一解 等价于 “f(x,E)=Ox+E”是单射 。
2、证明原 if 命题的逆否命题:若Ox+E不是单射(即最优问题有多解),则系统也不是2s稀疏能观。此时可以得到O(x1-x2)=E2-E1,显然E2-E1含有最多2s个非零元素。将这2s行去掉后,O_gamma(x1-x2)=0,即Y_gamma=O_gamma*x1=O_gamma*x2。这个式子意味着子系统(A,C_gamma)不是能观的(能观性的定义),即原系统不是2s稀疏能观的,证明完毕。
3、证明原 only if 命题的逆否命题:若系统不是2s稀疏能观,则Ox+E不是单射(即最优问题有多解)。由已知可得,存在某个子系统(A,C_gamma)不是能观的,故该子系统的输出方程满足:Y_gamma=O_gamma*x1=O_gamma*x2,将去掉的<=2s行分成两个基数小于s的集合gamma1和gamma2,然后以此构造合适的攻击向量E1和E2,可以得到O(x1-x2)=E2-E1,这个式子意味着Ox+E不是单射。
事实上,我们还可以找到更多的等价命题,比如在另一篇论文中有:
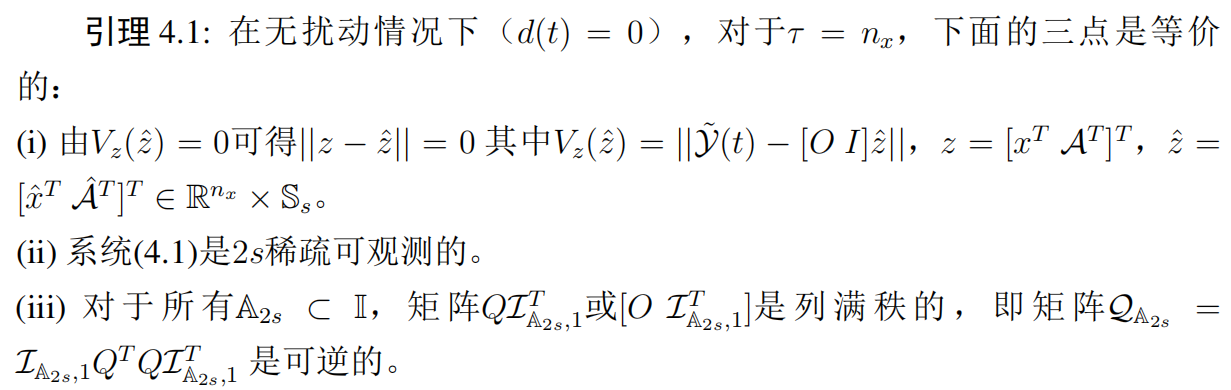
其中(i)和(ii)和上面的定理3.2中一样,这里只需要证明(ii)和(iii)等价:
注:引理4.1中的Q和之前的Q不一样,它在这里为I - O*inv(O'O)*O'。
矩阵A列满秩等价于A'A可逆;
判断一个矩阵是不是对称矩阵,计算A';
对于n阶实对称矩阵A,下面两个条件等价:1、存在秩为n的m×n实矩阵B,使A=B′B;2、A是正定矩阵;
两次使用舒尔补引理
Q矩阵的特殊性
一些与初等矩阵相关的运算技巧
这些命题共同描述了在无扰动情况下,状态和攻击估计值zˆ的唯一性。
2s受限特征值:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号