

Rigid Body
Body的创建。
对重要骨骼创建Body,保证Body控制的是表现和变化比较大的骨骼。
需要对Root创建Body并绑定,设置为Kinematic且不启用物理。原因是UPrimitiveComponent::SyncComponentToRBPhysics会取RootBody的位置来同步Component的位置。
Body的设置。
主要影响Ragdoll的效果。
Mass:影响惯性大小。
LinearDamping:线性阻尼。控制Body的线性速度减缓强度。值越大,速度减小越快。
AngularDamping:角速度阻尼。控制Body的角速度减缓强度。值越大,速度减小越快。
(以上两个数值,若启用PhysicalAnimationProfile,一般不再设置这两个数值,Profile的值也影响该效果)
Enable Gravity:是否启用重力。关闭后不受重力影响,只受Body的惯性影响。
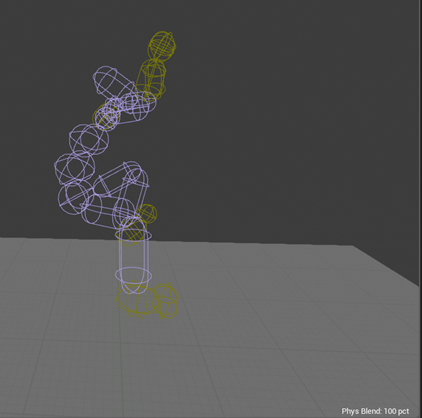
Physics Type:Default跟随OwnerComponent。Kinematic为不受物理影响。Simulated为受物理影响。一般情况下设为Default,需要保证随动画运动的Body设为Kinematic。
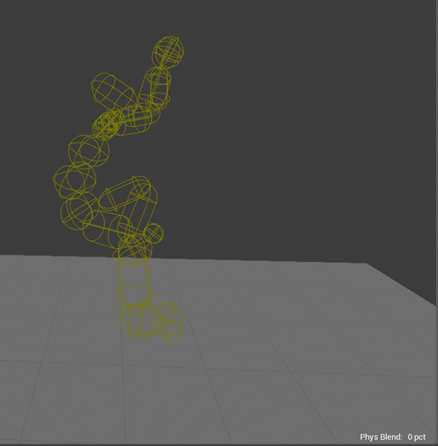
需要开启物理的Body建议设为Default而不是Simulated。原因是在编辑器调试时,关闭权重后DefaultBody可以正确显示到无物理情况。如图。
CollisionReponse:是否和外部物体碰撞。需要和外部物体碰撞时打开,如在人群中穿行和碰墙壁。
Body之间的Collision:
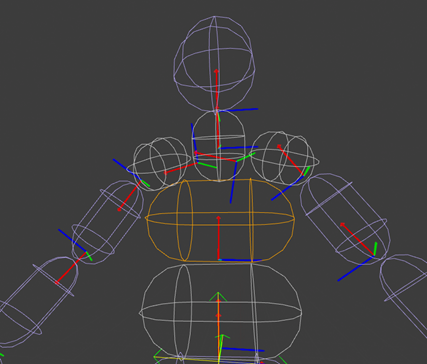
相邻的Body之间CollisionOff,避免运动时碰撞出现怪异现象。
CollisionOff的Body显示白色。CollisionOn的Body显示黄色。如图。
想使Body之间的碰撞效果生效需要设置Component的CollisionType。设为PhysicsBody,需要和自己(PhysicsBody)碰撞。注意不要和CapsuleComponent的类型Pawn碰撞。
如图。
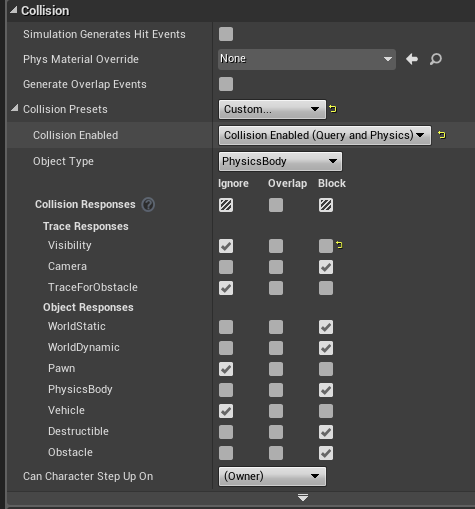
其余设置暂时使用默认,碰撞物理材质待研究。
Limit的设置。
原则上是根据人体骨骼活动范围设置limit,并且所有动作都应在limit中运动。为了方便,可把所有limit设为free,通过Physical Animation Profile来约束,Profile无法满足的,再去设置个别骨骼的limit,如Spine。
对于Root的约束。盆骨需要设为free。
Physical Animation Profile
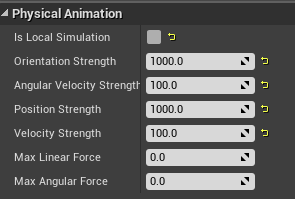
功能:全局控制。负责稳定Body的位置,向动画位置靠近。
原理:对每个Body(Dynamic),创建对应的KinematicBody进行辅助约束,两个Body之间加上关节约束,每帧设置Kinematic位置为当前动画位置,通过关节约束真实Body的运动。设置的值实际影响关节的Stiffness和Damping。
IsLocalSimulation:是否局部模拟。移动Kinematic时是全局还是相对父Body的。
全局的:取骨骼的位置。
局部的:取父Body对应的骨骼的相对Transform*父Body的物理位置。
一般使用全局的。局部的使用情况待研究。
相关代码:ComputeTargetTM
Orientation Strength:角度的变化强度。值越大,越靠近动画的角度。
Angular Velocity Strength: 角速度的变化强度。值越大,速度稳定(向动画靠近)的越快。
Position Strength:位置的变化强度。值越大,越靠近动画的位置。
Velocity Strength:线性速度的变化强度。值越大,速度稳定(向动画靠近)的越快。
一般Orientation和Position一致。1000/100的值基本和动画一致。100/10的值作用极弱。
MaxLinearForce/Angular Force:暂时不设置。
实际影响的是关节的Stiffness和Damping值。
相关代码:
ConstraintInstance.SetAngularDriveParams(PhysAnimData.OrientationStrength * StrengthMultiplyer, PhysAnimData.AngularVelocityStrength * StrengthMultiplyer, PhysAnimData.MaxAngularForce * StrengthMultiplyer);
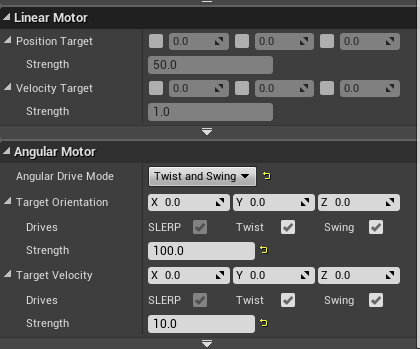
Constraint Profile
功能:局部控制。关节驱动身体靠近动画,靠近动画的姿势,而不影响Body的属性。如果靠PhysicalAnimationProfile驱动,会导致Body过于僵硬无法移动,ConstraintProfile解决了这一个问题,但运动时需要PhysicalAnimationProfile去稳定Body的位置(全局的)。
原理:设置Constraint的Motor,setDrive驱动关联的两个Body到达动画的相对Rotation。
SkeletalMeshComponent需要设置Update Joints From Animation为true.
Angular Drive Mode需要设置为Twist and Swing,Motor才会生效。
相关代码:
void USkeletalMeshComponent::UpdateRBJointMotors()
// If we found this bone, and a visible bone that is not the root, and its joint is motorised in some way..
if( (BoneIndex != INDEX_NONE) && (BoneIndex != 0) && (BoneVisibilityStates[BoneIndex] == BVS_Visible) && (CI->IsAngularOrientationDriveEnabled()) )
bool IsOrientationDriveEnabled() const
{
return TwistDrive.bEnablePositionDrive || SwingDrive.bEnablePositionDrive;
}
Target Orientation: 不必设置,Update Joints From Animation会取动画来设置该Orientation。
Strength:向动画靠近的强度。值越大越靠近,10000的值基本和动画一致。
Target Velocity: 设为0即可。可理解为停下的快慢。 待做:添加Update Velocity From Animation,从动画中取得目标速度。
Strength: 值越大,当前速度越靠近目标速度。若Target Velocity为0,值越大,则移动速度越慢(靠近0)。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号