【论文】基于DMPC的路径规划
DMPC
论文:《Trajectory Generation for Multiagent Point-To-Point
Transitions via Distributed Model Predictive Control》
摘要
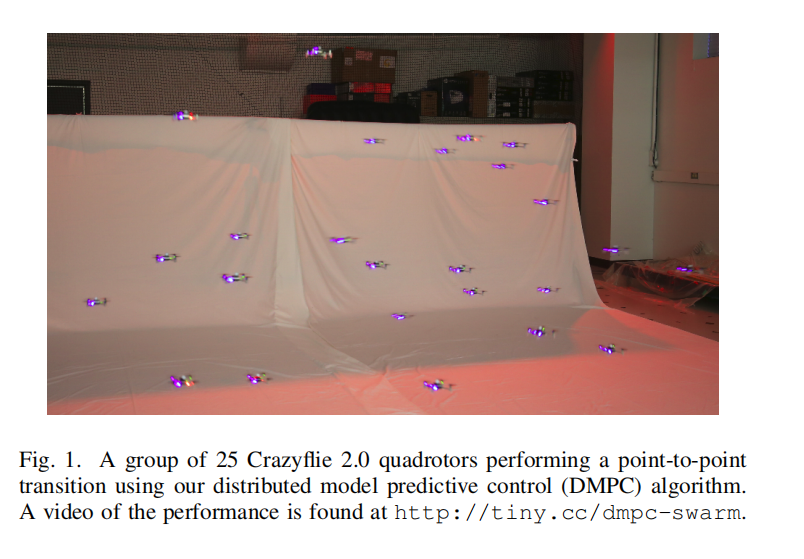
- 介绍了 一种基于分布式模型预测控制(DMPC)的多智能体offline轨迹生成算法。
- 通过预测未来状态并与附近的agents共享此消息,agent 能够在朝着目标前进的同时检测并进行避障。
- 提出的算法以分布式(distributed)方式实现,与基于顺序凸规划(sequential convex programming)SCP的优化方法相比计算时间减少了85%,同时对最优性的影响最小。
介绍
-
Multiagent point-to-point transition:多智能体点对点的转换有两个变量
- the labelled agent problem:每一个agent都有一个固定的不能与另外一个agent交换的固定的最终位置。(本文着重讨论的)
- the unlabelled agent problem:算法可以自由的将goals分配给agents,以减轻转换问题的复杂度。
-
the labelled agent problem的解决方法:
- 将他看做一个优化问题,比如混合整数线性规划MILP(Mixed Integer Linear Programming),使用二进制变量(0和1)构建碰撞约束。有一个致命的缺点就是计算复杂度太大,导致不适用于多agents。
- 顺序凸规划SCP比MILP的计算时间少,而且SCP是用于计算四旋翼集群的最佳能量轨迹;但是缺点也很明显,就是算法不能随着agent的数量增加而扩展,但是好像最近提出了一种decoupled版本的SCP,但是随着agent的增加,成功率也下降了。
- 分布式优化方法与集中式方法相比减少了计算时间。ORCA利用速度障碍(velocity obstacles)来雀儿包完整性agent和非完整性agent的无碰撞轨迹。因为他假设在一段时间内具有恒定的速度,所以该方法比较保守(conservative)。
- 关于本文介绍的DMPC。
问题陈述
the agents
第i个agent在k时刻的position、velocity、acceleration。其中\(a_i[k]\)是输入,h是离散化步骤h(discretization step h)。
Constraints
首先约束驱动约束:
- 加速度有一个最大和最小的约束
- 因为是在室内(indoor)进行试验,位置会有一个范围约束
Collision Avoidance
agent i和agent j之间的碰撞约束为:
n一般取2,rmin就是agent之间的最小距离,\(\Theta\)是缩放矩阵(scaling matrix),定义为\(\Theta=diag(a,b,c)\),a=b=1,c>1,这样的话就会要求竖直轴(z轴)方向上的最小距离为rz,min=crmin。
DMPC
在问题陈述部分提出的问题,可以看做一个优化问题,在每个时间步进解决一个问题,该问题基于描述agent动力学模型在给定的预测范围内找到最佳输入序列。该序列的第一个输入应用于真实系统并且测量结果状态(resulting state),这是下一个优化问题的起点(starting point)。但是这篇文章在输入之后不测量agents的状态,因为还没有布置实际的agent,而是将输入直接应用于模型用来计算生成下一步的轨迹。重复上一步直到生成全部的轨迹。
所以我们以分布式方式应用,就是让每个agent执行上述的迭代的优化问题去生成轨迹,并且和临近的agent分享信息。
Synchronous Algorithm
计算新的输入序列步骤:
-
使用在k~i~-1步计算的临近的agent的最新预测状态检查未来是否会发生碰撞。
-
构建包括状态(state)、动力(actuation)以及碰撞(collision)在内的约束优化问题。
-
在获得下一个最优序列之后,将序列的第一个元素应用于模型,agent向前移动一步。
The Agent Prediction Model
数学公式太难打了,大致的思想就是自己定义了一个算数运算符\([k\vert k_t]\),然后代到上面(1)(2)式子中去,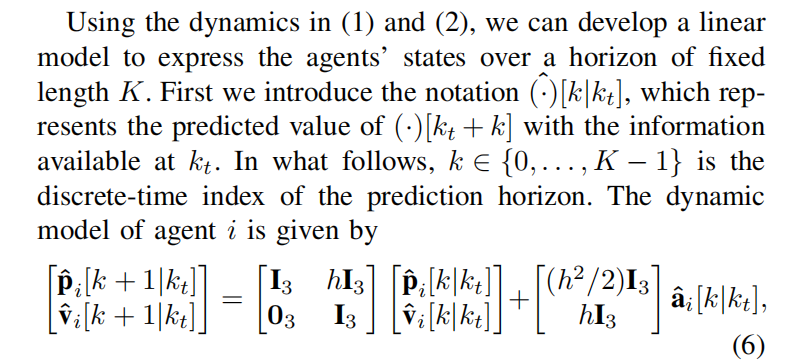
后面的东西就看不懂了。
Objective Function
目标函数主要有三个组成部分:
-
轨迹误差(trajectory error)
这一部分主要是驱使agent到达goal,定义误差和为$$e_i=\sum^K_{k=K-j}\Vert p_i[k\vert k_t]-p_{d,i}\Vert_2$$
其中j为最后的time step,\(p_{d,i}\)是desired final position。
j越大,会导致agent的行为比较激进,agent会更快的朝着目标移动,但是也可能会导致目标位置超调(overshoot)
我在这里盲猜一手激进的j选取会导致collision constraint很难满足。
-
控制作用(control effort)
-
输入变化(input variation)
用于最小化加速度的变化,从而生成平滑的输入轨迹
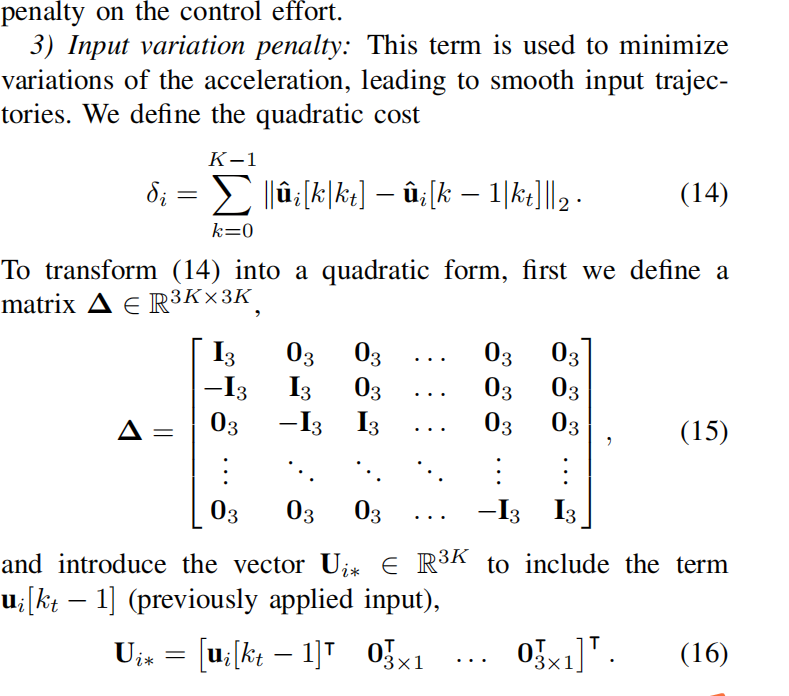
其中u是输入,只能写到这了,后面是能力有限。
-
物理限制(Physical Limits)
就是前面驱动约束:提到的constraint
-
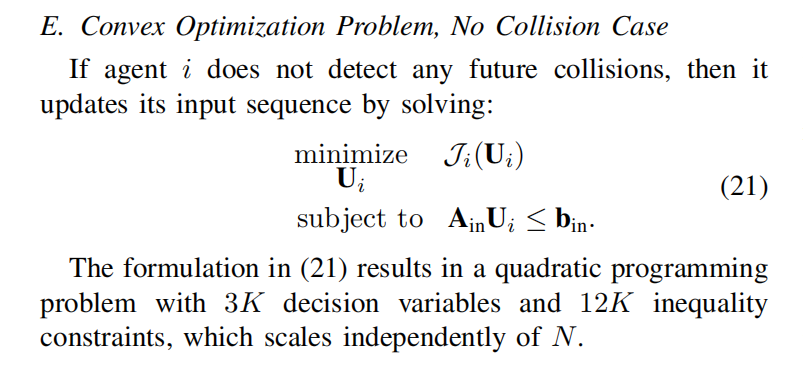
凸优化问题,无碰撞(Convex Optimization Problem)
把上面所有目标函数和约束结合起来可以看成一个3K决策变量和12K个不等式约束的二次规划问题。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号