【论文】基于MPC的路径跟踪
mpc论文归纳
《Linear vs Nonlinear MPC for Trajectory Tracking Applied to Rptary Wing Micro Aerial Vehicles》
Abstract
this paper discusses about the applications of precise trajectory tracking in cluttered environment or under disturbances when MAVs work. So this paper presents a comparison between classical linear model predictive controller(LMPC) against advanced nonlinear model predictive controller(NMPC).
Introduction
The goal of this comparison is to emphasis the benefits and drawbacks of considering the full system dynamics in terms of performance improvement,disturbance rejection and computation effort.
To achieve high performance with the cascade approach(级联法),it is necessary to account for the inner-loop dynamics(内循环动力) in the trajectory tracking controller.
Related Work
Some researchers have found that PID controller was performing better than an LQ controller(回授控制、线性二次).
hierachical(分层的)
aerodynamic drag model(气动阻力模型)
Gaussian Process(高斯过程)
MAV Model
| name | meaning |
|---|---|
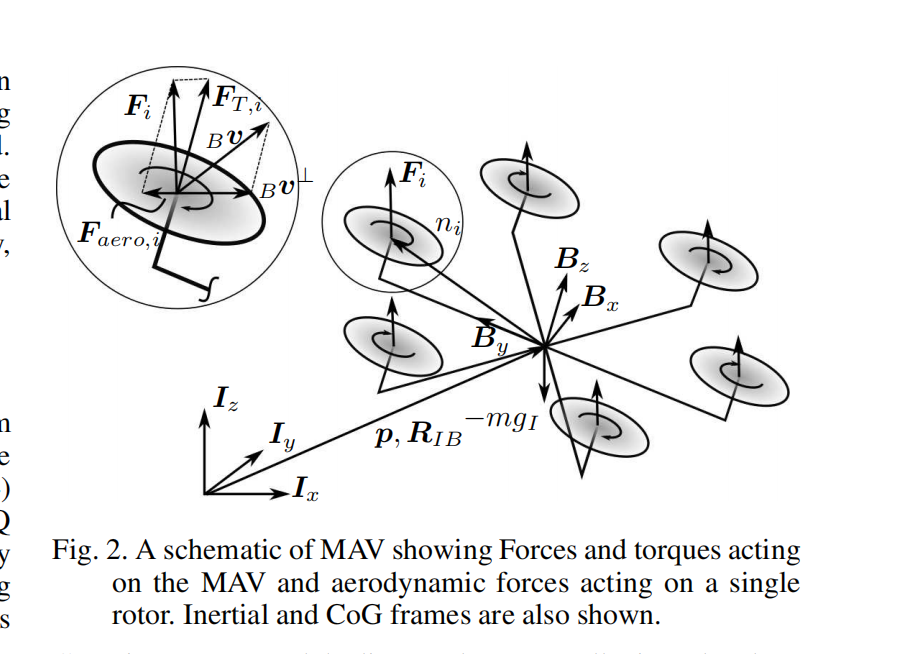
| I | the world fixed inertial frame |
| B | the body fixed frame |
| v | the vehicle velocity in inertial frame |
| $$\omega$$ | the body angular rate |
| CoG | the Center of Gravity |
| $$R_{IB}$$ | the vehicle orientation |
| $$F_{T,i}$$ | generated thrust |
| $$M_i$$ | moment |
| kd | lumped drag coefficient |
Each propeller generates thrust proportional to the square of the propeller rotation speed and angular moment due to the drag force :由于阻力,每个螺旋桨产生的推力与螺旋桨转速和角力矩的平方成正比
closed-loop attitude model(闭环姿态模型)
dynamic maneuvers(动态动作)
blade flapping(叶片拍打)
induced drag(诱导阻力)
damping(阻尼)
lumped drag coefficient (总阻力系数)
in
OCP optimal control problem
RMSE 均方根误差
Extended Kalman Filter (EKF)
LINEAR MPC
To achieve a better tracking performance of dynamic trajectories, this paper includes a feed-forward term by setting the reference control input.
there are so many formulations,so I don't want to repeatedly present those.
NONLEAR MPC
this approach can gains a particular attention recently to address optimal control problems.
摘要
本文讨论了精确轨迹跟踪在 MAV 工作时在杂乱环境或干扰下的应用。 因此,本文将经典的线性模型预测控制器 (LMPC) 与先进的非线性模型预测控制器 (NMPC) 进行比较。
介绍
对比了LMPC和NMPC,这种比较的目的是强调考虑整个系统动力学在性能改进、抗干扰和计算工作方面的优点和缺点。 为了使用级联法实现高性能,有必要在轨迹跟踪控制器中考虑内循环动力(inner-loop dynamics)。
比较
| 条件 | LMPC | NMPC |
|---|---|---|
| Hovering under no external disturbance | RMSE is 1.84cm | RMSE is 2.05cm |
| Hovering under external wind of 11m/s | RMSE is 2.7cm | RMSE is 2.5cm |
| Step Response | rise time is 1.6s and overshoot percentage is 1.98% | rise time is 1.0s and overshoot percentage is 1.98% |
| Aggressive Trajectory tracking | RMS is 10.8cm | RMS is 7.1cm |
| Computation effort | an average solve time of 2.35 ms | an average solve time of 0.45 ms |
从以上三个方面可以表现出,NMPC比LMPC在复杂环境干扰、阶跃反应、路径跟踪和计算时间中有着更好的表现。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号