深度学习——深度学习的实用层面[5]
目录
- 数据集划分
- 偏差和方差
- 判断方差和偏差并调整的基本思想
- 解决高方差问题
- 归一化输入的特征值(X)
- 梯度爆炸/消失
- 用双边导数来进行梯度检验
一、数据集可以划分成三个部分:训练(train)/检验(dev)/测试(test)
在train set上进行训练,在dev上进行验证找出了最好的模型,最后在test进行评估最终模型的性能如何
数据集的划分:一般地,数据量小的时候可以用3:1:1划分,数据量较大时,dev和test的数据占比可以小一些
如果train和dev/test来自不同的源,那么至少要保证dev和test来自相同的分布
二、偏差和方差
| training set error | dev set error | ||
| 1% | 11% |
high variance 方差较高:过拟合 (在训练集上表现良好, 但是在测试集上表现较差) 出现的原因: 数据有噪声(采集)、训练集不足、 模型训练过度 |
 |
| 15% | 16% |
high bias 偏差过高:欠拟合 |
 |
| 15% | 30% |
high bias & high variance |
 |
| 0.5% | 1% | just right |  |
三、判断方差和偏差并调整的基本思想
最优误差:贝叶斯误差 图片分类中,如果train的图像模糊,则可能导致最优误差值较大
偏差和方差的tradeoff
|
if high bias(training data problem): use bigger network train longer NN architecture search else(high variance, dev set problem): more data regulation NN architecture search |
四、解决高方差问题
- L1/L2正则化:
正则化方法:通过对loss函数添加一个正则项(loss=经验风险+结构风险,系数用来平衡两者),来对模型复杂度进行约束
给loss函数增加一项L2范数(每一层的$w$范数求和):$J(w, b)=\frac{1}{m}\sum_i^m{L(\widehat{y}^{(i)},y^{(i)})}+\frac{\lambda}{2m}\sum_{l=1}^L||w^{[l]}||^2_F$
L2范数:向量中各个元素的平方和然后再求平方根$||w||^2_2=\sum_{j=1}^{n_x}w_j^2=w^Tw$
L2正则化也称为权重衰减,因为w值一直乘以一个小于1的数
$||w^{[l]}||_F^2=\sum_{i=1}^{n^{[l-1]}}\sum_{j=1}^{n^{[l]}}(w_{ij}^{[l]})^2$
$dw^{[l]}=(from backprop) + \frac{\lambda}{m}w^{[l]}$
$w^{[l]}:=w^{[l]}-\alpha dw^{[l]}=(1-\frac{\alpha \lambda}{m})w^{[l]}-\alpha (from backprop)$
L0范数:非0的个数。为了让loss小一些,则参数中非0个数也要少一些,也就是0多一些,即让向量w稀疏
L1范数:向量w中各个元素的绝对值之和$||w||_1=\sum_{j=1}^{n_x}|w_j|$。L0范数不易优化
$\lambda$正则化参数
为什么L2正则化可以消除高方差的问题
直观上如果入值很大,为了最小化$J$,那么$W$的值就会趋近于0,则很多隐藏单元的效果就会被消除,网络会变得很简单
$\lambda$变大,$W$变小,z的取值在如下红色区域内,则g(z)就会变成线性(每一层变成线性),也就不可能作出复杂的决策

常见正则化方法:
L0范数:约束参数中非0的个数,非凸
L1范数(Lasso):约束绝对值求和,不能直接求导
L2正则(ridge regresson):参数值2次方求和,凸函数
P范数:P次方
- dropout正则化(随机失活)
工作方式:遍历每一层并设置消除节点的概率,从而把网络精简,再进行训练
为什么:开始是希望不要过分依赖于某个参数,dropout作用与L2正则化类似,一般可以用于输入范围比较不同的情况
keep-prob的设置:每一层的keep-prob可以设置不同。如果节点数比较少(过拟合的可能性比较小),则该值可以大一点
缺点:代价函数不能被明确定义,因为每次会随机丢弃一些节点,不便于调试(可以先把dropout关闭,保证J是下降的)
dropout方法在CV中的应用比较多,一般在test阶段不会使用
常用的实施方法:反向随机失活(invented dropout)
|
第$l$层:$l=3$, keep-prob=0.8 //随机生成一个true/false矩阵,其中每个值为true的概率为0.8(keep-prob保留节点的概率) d3=np.random.rand(a3.shape[0], a3.shape[1]) a3=np.multiply(a3,d3) //这一步是inverted dropout:通过除来保持a3的期望值不变 //因为上一步中a3的结果可能会消除一些节点 // 原来a3中所有值的平均为sum/n;随机dropout后sum'=0.8sum,相应的n'=0.8n,才能保证期望不变 a3/=keep-prob |
- 增大数据集
由于直接收集数据的代价会大一点,那么可以通过对原有数据进行变形来增加数据量
- early stopping
随着迭代次数增加,train上的错误率会下降,而dev的错误会可能会先降后升,可以在dev的最低点停止
五、归一化输入的特征值(X)
train和test都应该用同样的$u$和$\sigma$作同样操作
零均值化:$u=\frac{1}{m}\sum_{i=1}^{m}x^{(i)}$,$x:=x-u$
归一化方差:$\sigma^2=\frac{1}{m}\sum^m_{i=1}x^2_{(i)}$,$x:=x/\sigma$

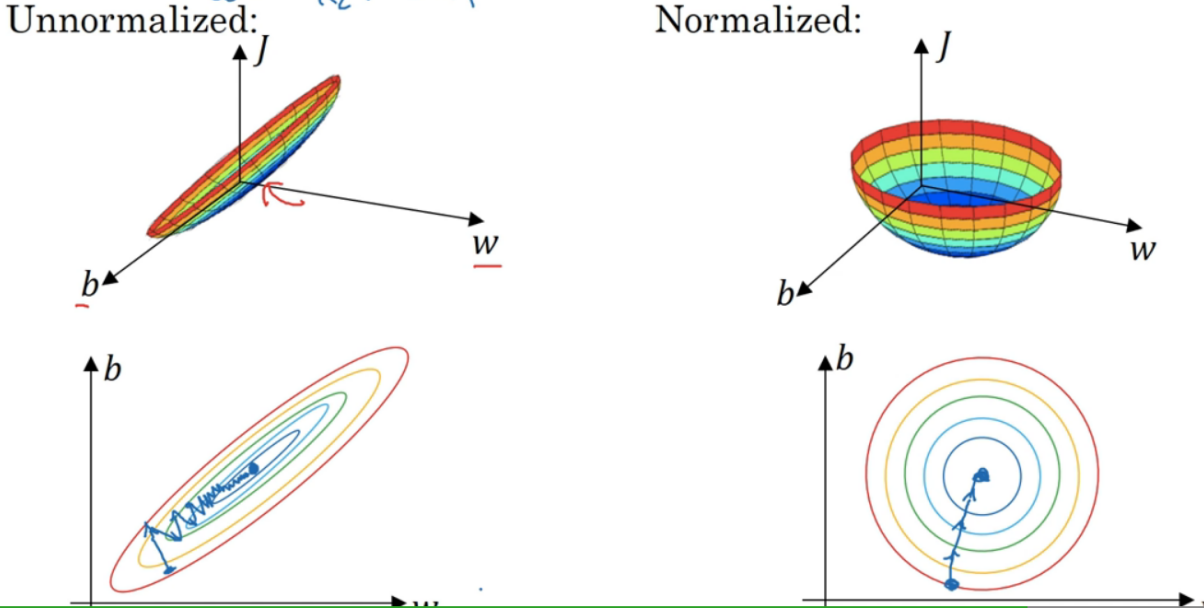
为什么归一化
通过归一化处理,使得X的各个特征值取值在相似的范围内,有利于梯度下降的执行加快速度,每次梯度下降时可以用大一点的步长,不像未归一化时,后期的步长就要很小了
为什么未归一化时,$J$的图会是这种狭长的?因为如果一个$x$大,一个$x$小。对于当$J$取到同一个值(等势面),则大$x$对应的$w$就要小一点,而小$x$对应的$w$就要大一点
当特征值的取值范围差很多时,归一化是有必要的
六、梯度爆炸/消失
- 导数指数增加/减小
- 当w大于单位矩阵或小于单位矩阵 vanish/explode
令$g(z)=z$且$b=0$,则$\widehat{y}=w^{[l]}a^{[l-1]}+b^{[l]}=w^{[l]}w^{[l-1]}...w^{[1]}x$
若$w^{[l]}$是1.5倍的单位矩阵,则$\widehat{y}=w^{[1]}\begin{bmatrix}1.5 & 0\\ 0 & 1.5\end{bmatrix}^{[l-1]}x$
会成梯度增长。反之,$\frac{d\widehat{y}}{dw^{[1]}}$梯度下降
- 避免爆炸/消失的方法:初始化w时,让它是与n层数有关,让w随n增加而变小
如$w^{[l]}=random*\sqrt{\frac{2}{n^{[l-1]}}}$
七、用双边导数来进行梯度检验grad check
在反向求导中可以进行梯度检验的测试来保证求导是正确的
- 双边求导
$g(\theta)=\frac{f(\theta + \epsilon)-f(\theta - \epsilon)}{2\epsilon}$
- 梯度检验
对每个参数$\theta_i$,$d\theta_{approx}^{[i]}=\frac{J(\theta_1,\theta_2...,\theta_i+\epsilon,...)-J(\theta_1,\theta_2...,\theta_i-\epsilon,...)}{2\epsilon}\\ \approx d\theta[i]=\frac{dJ}{d\theta_i}$
检查$||d\theta_{approx}-d\theta||_2$和$||d\theta_{approx}+d\theta||_2$的差值($\epsilon=10^{-7}$)
- 梯度检验实现的注意点
- 不要在训练时使用,只应该用于debug
- 如果发现算法grad check失败,考虑在算法模块中识别bug
- 记住正则化
- 不要和dropout一起使用,因为可能有些节点会被消除
- 在随机初始化参数并训练一段时间后进行梯度检验。因为有可能在$w$和$b$接近0时,梯度结果正确,而当和0差较大时,梯度结果不正确(这种情况不太多)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号