
STM32通过rosserial接入ROS通讯开发
作者:良知犹存
转载授权以及围观:欢迎添加微信公众号:羽林君
前言
主题:串口是一种设备间常用的通讯接口,rosserial将串口字符数据转发到标准ROS网络,并输出到rosout和其日志文件。本文将记录如何在ROS上使用其提供的serial包进行串口通信。
我的环境介绍:
PC:使用的是Ubuntu 16-04 ROS-Kinetic
嵌入式端:STM32F071
ROS机器人操作系统是用于创建机器人系统的功能强大的平台,其中包括开发项目所需的一切,从最简单的软件组件(称为“节点”)和数据交换协议到真正的凉亭机器人平台的仿真环境。至于ROS这个操作系统的介绍大家可以看我之前的那篇文章《嵌入式为什么要学ROS》
总之ROS是一个在机器人设备端比较常用的分布式处理框架,但是因为ROS的包很多功能也比较复杂,所以一般都是跑在linux系统的板卡上,像stm32一类的单片机就使用的比较少,但是如果我们想用ROS的通讯接口到我们STM32中,那我们应该怎么做呢?
使用介绍
这个时候就要提起rosserial,这个ROS提供一种嵌入式节点和运行在主控PC上的ros master通信的方式,使得在嵌入式节点上编写、运行ros节点成为可能,主要用于转接IO和各类传感器,运行底层控制算法。
要使用rosserial,显然需要分别在嵌入式板卡和主控PC上部署,当前支持的板卡有:
arduino stm32等这些比较热门的嵌入式端。

但是目前关于结合STM32微控制器使用ROS机器人操作系统的信息,其实网上使用的还是很少,不过网上还是有几个比较好的的stm32结合ROS使用的代码,其中有一个stm32rc和rtt的配置,不过RTT的配置我使用之后发现有些问题,已经给RTT在github的仓库提交了问题
不过RT_Thread官网的文档中心还是做的很好的,对于使用ROSSERIAL的包在STM32还是介绍的很详细,大家有兴趣可以去看一下
https://www.rt-thread.org/document/site/tutorial/smart-car/ros-connect/ros-connect/

ROSLib实战的使用
首先stm32 ROS serial的使用分为两部分,分别为PC端ROS环境接收数据, 嵌入式端STM32进行发送ROS数据。
首先我是使用的其他人分享一个包进行开发的,使用的是makefile文件进行编译,编译器选择的是
gcc-arm-none-eabi-4_9-2015q3
程序文件如下所示:

其中Bsp包里面主要是stm32串口串口配置的文件和时间定时的程序文件:

这里的配置方法其实就和我们平时的用库函数配置STM32串口的方法没什么区别,只不过是配置程序放到了HardwareSerial这个类成员函数中。

Dirver包中是我进行自定义的各种电机控制和IMU等的程序包
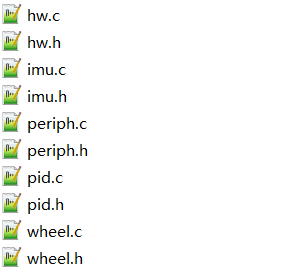
从程序文件的名称大家应该就可以看出来,这个部分的文件也是做外设等的基本配置,数据的基本发送和接收部分。例如:这里面wheel的配置

lib目录下有两个lib库:

其中rsolib其实就是使用ROS的时候程序中需要的头文件,ros msg的各种类。
这些类是我们定义ROS的topic或者service节点时候发送的数据类型,以及ROS serial的串口配置等头文件都在这个包里面

stm32lib是stm32配置时候的各种库文件,包括stm32f0xx.h、CMSIS、库文件和启动汇编文件

再下面src目录里面就放着我们的main.cpp
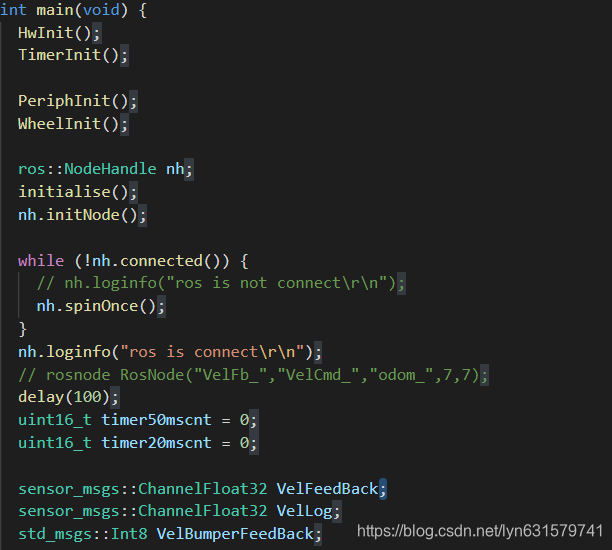
这个部分是比较重要的,main函数的部分除了初始化,我们也可以定义我们需要的topic节点。
initialise();
ros::NodeHandle nh;
nh.initNode()
while (!nh.connected()) {
// nh.loginfo("ros is not connect\r\n");
nh.spinOnce();
}
sensor_msgs::ChannelFloat32 VelFeedBack;
ros::Publisher velfeedbackpub("VelFb_", &VelFeedBack);
nh.advertise(velfeedbackpub);
nh.spinOnce();
float fbVel[7];
while (1)
{
if ((millis() - previous_debug_time) >= (1000 / DEBUG_RATE)) //定时发送
{
VelFeedBack.name = "r";
VelFeedBack.values = fbVel;
VelFeedBack.values_length = 7;
velfeedbackpub.publish(&VelFeedBack);
}
nh.spinOnce();
}
最后面是部分是makfile文件,其中makefile文件分了两部分,一个include头文件,一个makefile文件。
makefile.include文件中,和正常的IDE选项一样,里面包含了芯片选择、编译选择、链接选择、以及相应的程序文件目录设置。
其中芯片我选择了STM32F072

编译选项我按照默认,也没有修改,其中交叉编译器是用的 arm-none-eabi-gxx

makefile 文件中我设置了我自行定义的程序文件

此外我还下载了 arm-none-eabi-gxx 的包
编译前先用export 配置一个编译器的选项:
其中我下载好的编译器目录在 /home/lyn/M0/gcc-arm-none-eabi-4_9-2015q3
export PATH=/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/home/lyn/M0/gcc-arm-none-eabi-4_9-2015q3/bin
使用 make 命令 编译,最后会在当前目录生成一个main.bin文件,这个时候我们就可以把main.bin文件通过j-link或者st-link下载软件把程序下载到板子中去。

PC端连接
PC端安装ROS大家可以参考我之前的ROS安装的文章,一般安装ROS都是安装的全功能版本(全功能含有ROSSERIAL),如果你只是安装了部分的话,那你还需要多进行安装ROS serial
sudo apt-get install ros-kinetic-rosserial-python
我是使用我们最常见的USB转串口工具连接到我的电脑端口。

我们首先检查串口号 用命令 “ls /dev/ttyUSB*” 一定要在程序中USB的参数完全一致。
首先在一个终端开启 roscore

然后使用我们安装好的 rosserial_python 进行启动节点
rosrun rosserial_python serial_node.py /dev/ttyUSB0 _baud=115200
当然第一次启动会进行报错,权限不够,拒绝访问,,此时我们就需要对USB的权限进行设置,使得 /dev/ttyUSB0 可以被读写
sudo chmod 777 /dev/ttyUSB0
在启动过程中,我们就可以看到我们设置的publis的 VelFb_就初始化了。

此时我们使用 rostopic list 就可以看到相应注册好的通信点,然后再使用
rostopic echo /VelFb_

结语
这就是我使用STM32接入ROS节点的方法,大家有什么更好的建议可以一起和我交流,如果大家对代码感兴趣,可以在公众号后台回复我 STM32使用ROSLIB 或者 微信私我。我把我使用的代码和编译器一个分享给感兴趣的朋友们。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号