TranUnet代码梳理
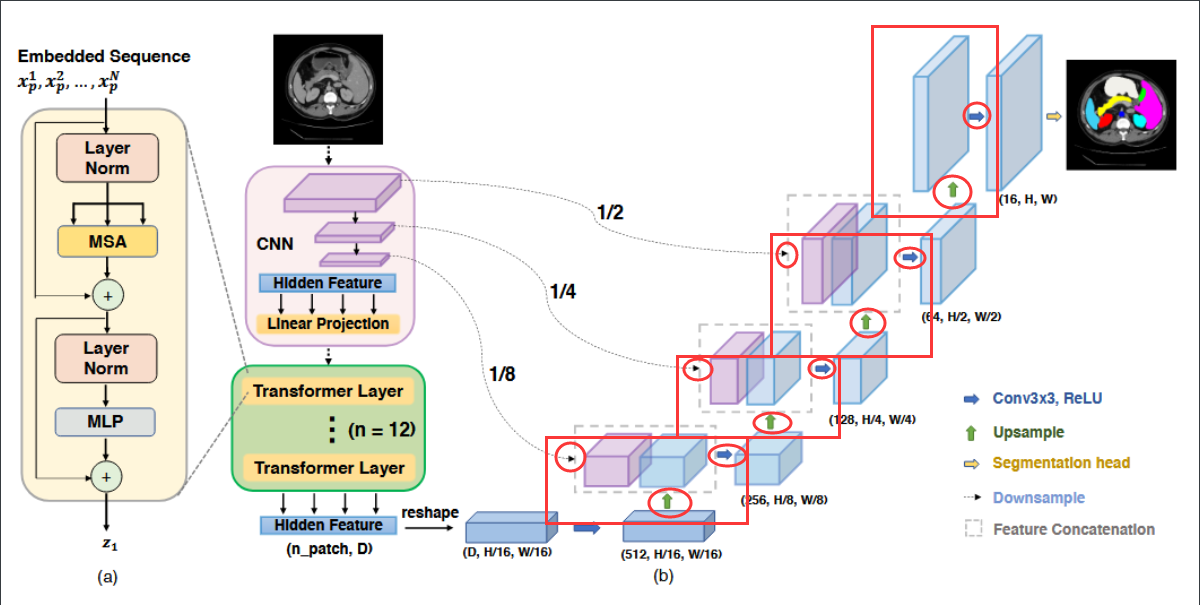
TransUNet
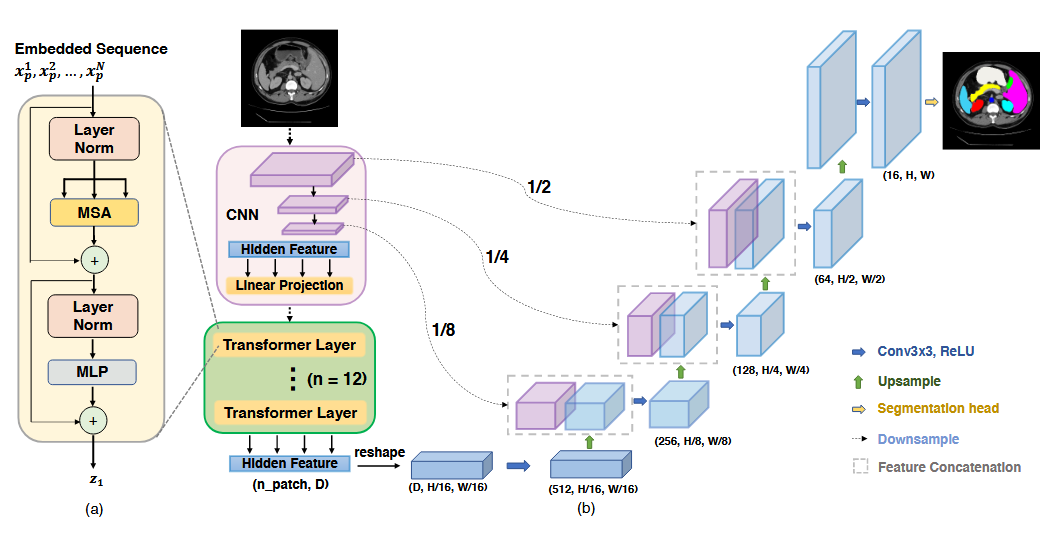
类似 Unet 结构,融入了Transformer思想,所以称作TransUNet
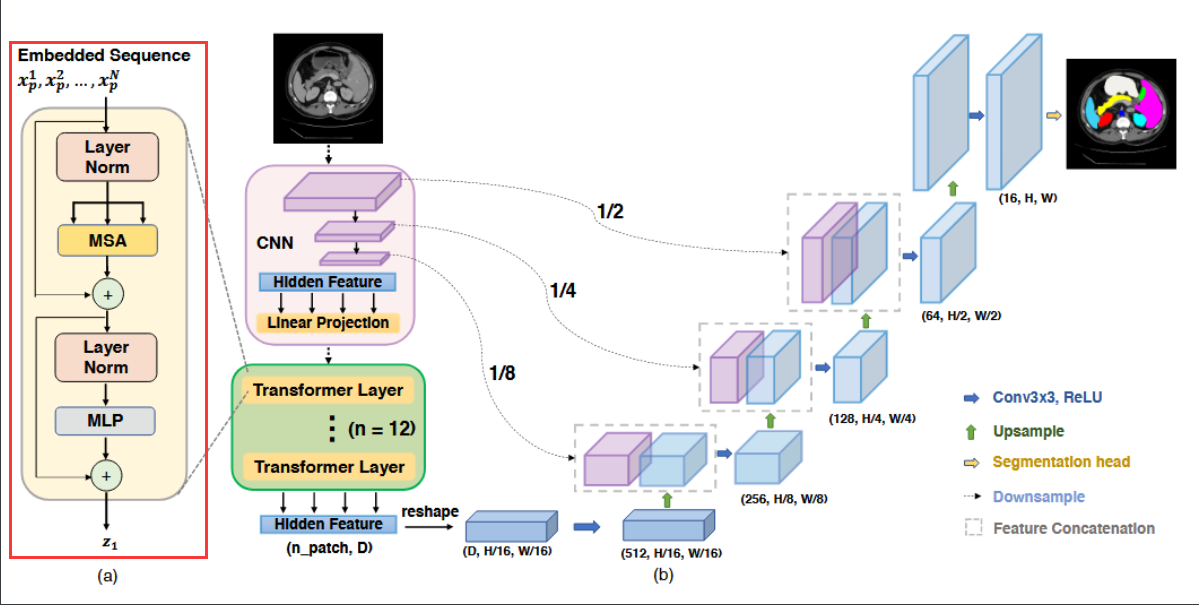
故事的开始还要从VisionTransformer类看起
class VisionTransformer(nn.Module):
def __init__(self, config, img_size=224, num_classes=21843, zero_head=False, vis=False):
super(VisionTransformer, self).__init__()
self.num_classes = num_classes
self.zero_head = zero_head
self.classifier = config.classifier # 'token'
self.transformer = Transformer(config, img_size, vis)
self.decoder = DecoderCup(config)
self.segmentation_head = SegmentationHead(
in_channels=config['decoder_channels'][-1], # (16) (256, 128, 64, 16)
out_channels=config['n_classes'], # 9
kernel_size=3,
)
self.config = config
def forward(self, x):
if x.size()[1] == 1: # 如果图片是灰度图就在其通道方向进行复制从1维转成3维(比如CT图像就是灰度图)
x = x.repeat(1,3,1,1) # (B,3,H,W)
x, attn_weights, features = self.transformer(x) # (B, n_patch, hidden), attn_weights 从头到尾都未用过
x = self.decoder(x, features) # 解码
logits = self.segmentation_head(x)
return logits
可以看到Transformer类相当于编码部分,然后从Transformer类看起
Transformer类
class Transformer(nn.Module):
def __init__(self, config, img_size, vis):
super(Transformer, self).__init__()
self.embeddings = Embeddings(config, img_size=img_size)
self.encoder = Encoder(config, vis)
def forward(self, input_ids):
embedding_output, features = self.embeddings(input_ids)
encoded, attn_weights = self.encoder(embedding_output) # (B, n_patch, hidden)
return encoded, attn_weights, features # features是提取的特征
包含Embeddings类和Encoder类,其中Embeddings类是用来编码,Encoder类是MSA实现流程,即绿色框中部分。
Embeddings类
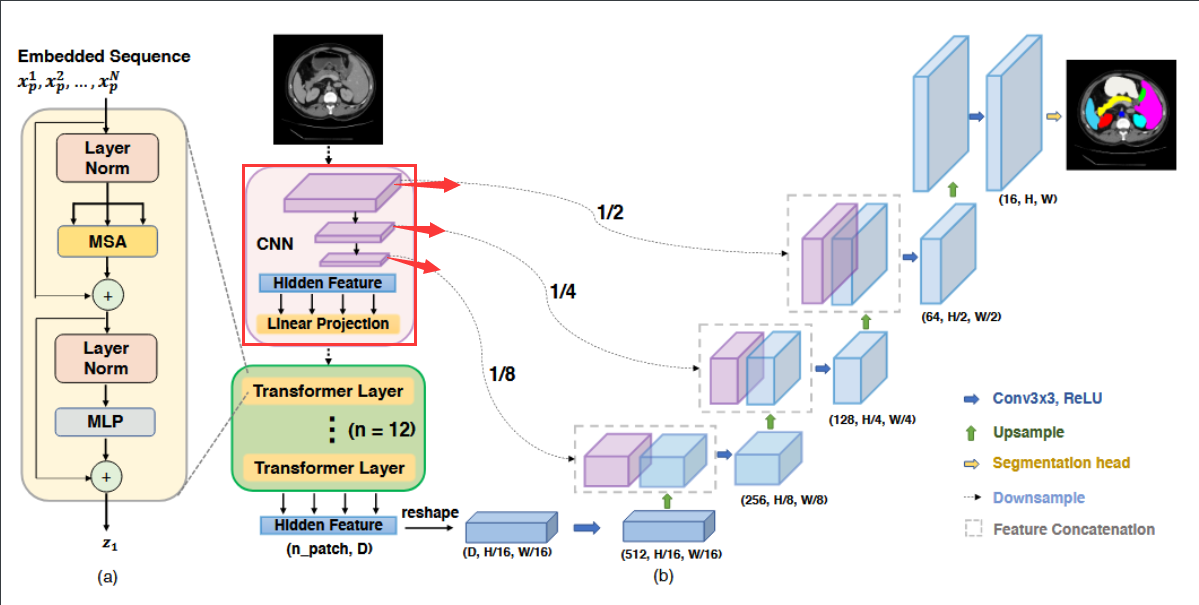
其中三个裁剪部分是在Embeddings类中实现的
class Embeddings(nn.Module):
"""Construct the embeddings from patch, position embeddings.
负责将输入图像转换为一系列嵌入向量
"""
def __init__(self, config, img_size, in_channels=3):
super(Embeddings, self).__init__()
self.hybrid = None
self.config = config
img_size = _pair(img_size)
if config.patches.get("grid") is not None: # ResNet
grid_size = config.patches["grid"] # (14,15)
patch_size = (img_size[0] // 16 // grid_size[0], img_size[1] // 16 // grid_size[1]) #
patch_size_real = (patch_size[0] * 16, patch_size[1] * 16)
n_patches = (img_size[0] // patch_size_real[0]) * (img_size[1] // patch_size_real[1])
self.hybrid = True
else:
patch_size = _pair(config.patches["size"])
n_patches = (img_size[0] // patch_size[0]) * (img_size[1] // patch_size[1])
self.hybrid = False
if self.hybrid:
self.hybrid_model = ResNetV2(block_units=config.resnet.num_layers, width_factor=config.resnet.width_factor) #((3,4,9),1)
in_channels = self.hybrid_model.width * 16 # 64*16 = 1024
self.patch_embeddings = Conv2d(in_channels=in_channels,
out_channels=config.hidden_size,
kernel_size=patch_size,
stride=patch_size) # (1024,768,1,1)
self.position_embeddings = nn.Parameter(torch.zeros(1, n_patches, config.hidden_size)) # (1,196,768)
self.dropout = Dropout(config.transformer["dropout_rate"])
def forward(self, x):
if self.hybrid:
x, features = self.hybrid_model(x) # [1, 1024, 14, 14]
# 从这里开始看,
else:
features = None
x = self.patch_embeddings(x) # (B, hidden. n_patches^(1/2), n_patches^(1/2)),[1, 768, 14, 14]
x = x.flatten(2) # 从第二个维度开始展开,即将H,W合并
x = x.transpose(-1, -2) # (B, n_patches, hidden)
embeddings = x + self.position_embeddings # 加入位置信息
embeddings = self.dropout(embeddings) # 防止过拟合
return embeddings, features # features是通过ResNetV2提取的特征,这个是默认的,可以设置
CONFIGS = {
'ViT-B_16': configs.get_b16_config(),
'ViT-B_32': configs.get_b32_config(),
'ViT-L_16': configs.get_l16_config(),
'ViT-L_32': configs.get_l32_config(),
'ViT-H_14': configs.get_h14_config(),
'R50-ViT-B_16': configs.get_r50_b16_config(),
'R50-ViT-L_16': configs.get_r50_l16_config(),
'testing': configs.get_testing(),
}
# 作者提供了7种特征提取模型,默认是R50-ViT-B_16,stem和前两个Stage提取到的特征加入列表
关于Vit模型的解释:【计算机视觉 | 目标检测】术语理解6:ViT 变种( ViT-H、ViT-L & ViT-B)、bbox(边界框)、边界框的绘制(含源代码)-CSDN博客
Encoder
class ResNetV2(nn.Module):
"""Implementation of Pre-activation (v2) ResNet mode."""
def __init__(self, block_units, width_factor):
super().__init__()
width = int(64 * width_factor)
self.width = width
self.root = nn.Sequential(OrderedDict([
('conv', StdConv2d(3, width, kernel_size=7, stride=2, bias=False, padding=3)),
('gn', nn.GroupNorm(32, width, eps=1e-6)),
('relu', nn.ReLU(inplace=True)),
# ('pool', nn.MaxPool2d(kernel_size=3, stride=2, padding=0))
]))
self.body = nn.Sequential(OrderedDict([
('block1', nn.Sequential(OrderedDict(
[('unit1', PreActBottleneck(cin=width, cout=width*4, cmid=width))] +
[(f'unit{i:d}', PreActBottleneck(cin=width*4, cout=width*4, cmid=width)) for i in range(2, block_units[0] + 1)],
))),
('block2', nn.Sequential(OrderedDict(
[('unit1', PreActBottleneck(cin=width*4, cout=width*8, cmid=width*2, stride=2))] +
[(f'unit{i:d}', PreActBottleneck(cin=width*8, cout=width*8, cmid=width*2)) for i in range(2, block_units[1] + 1)],
))),
('block3', nn.Sequential(OrderedDict(
[('unit1', PreActBottleneck(cin=width*8, cout=width*16, cmid=width*4, stride=2))] +
[(f'unit{i:d}', PreActBottleneck(cin=width*16, cout=width*16, cmid=width*4)) for i in range(2, block_units[2] + 1)],
))),
]))
def forward(self, x):
features = []
b, c, in_size, _ = x.size()
x = self.root(x)
features.append(x)
# root模块后提取初始特征添加到features列表
x = nn.MaxPool2d(kernel_size=3, stride=2, padding=0)(x)
for i in range(len(self.body)-1):
x = self.body[i](x)
right_size = int(in_size / 4 / (i+1))
if x.size()[2] != right_size:
pad = right_size - x.size()[2]
assert pad < 3 and pad > 0, "x {} should {}".format(x.size(), right_size)
feat = torch.zeros((b, x.size()[1], right_size, right_size), device=x.device)
feat[:, :, 0:x.size()[2], 0:x.size()[3]] = x[:]
else:
feat = x
features.append(feat)
# 前两个Block后提取到的特征添加到features列表中
x = self.body[-1](x)
return x, features[::-1]
将特征提取完毕后输出[1, 1024, 14, 14],使用卷积降低通道维度,然后加入位置信息,传入MSA
Encoder类
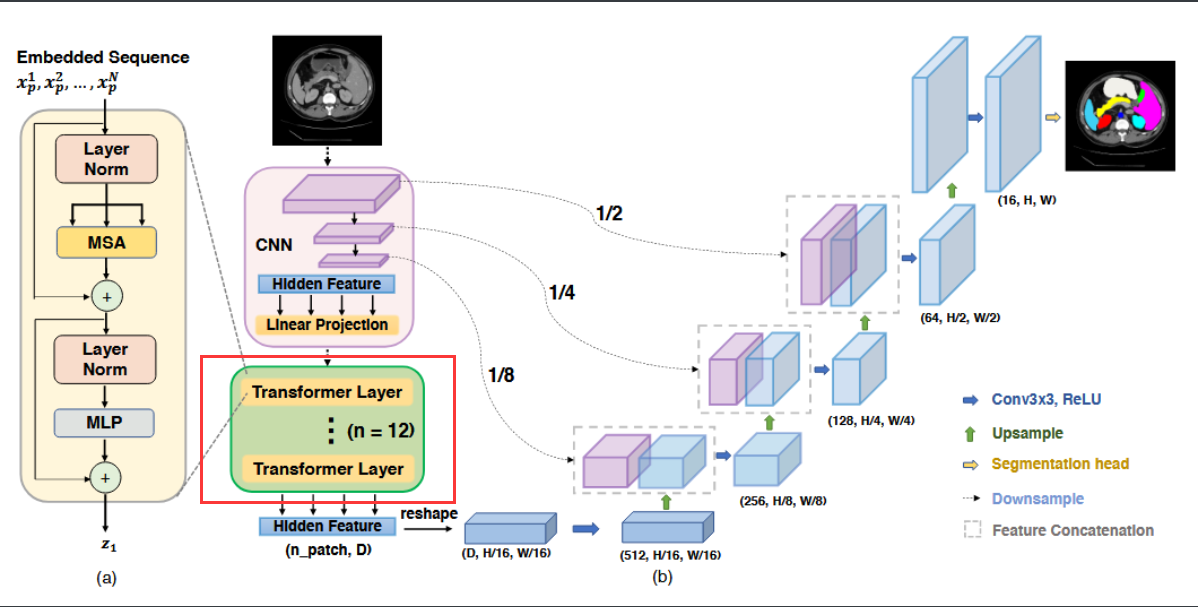
class Encoder(nn.Module):
def __init__(self, config, vis):
super(Encoder, self).__init__()
self.vis = vis
self.layer = nn.ModuleList()
self.encoder_norm = LayerNorm(config.hidden_size, eps=1e-6)
for _ in range(config.transformer["num_layers"]): # config.transformer["num_layers"]=12
layer = Block(config, vis)
self.layer.append(copy.deepcopy(layer))
def forward(self, hidden_states):
attn_weights = [] # 注意力系数
for layer_block in self.layer:
hidden_states, weights = layer_block(hidden_states)
if self.vis: # 该参数全程都是False
attn_weights.append(weights)
encoded = self.encoder_norm(hidden_states) # 归一化
return encoded, attn_weights # attn_weights 此参数全程都没有用到
Block类即注意力机制
其中MSA 指的是 Multihead Self-Attention
class Block(nn.Module):
def __init__(self, config, vis):
super(Block, self).__init__()
self.hidden_size = config.hidden_size # 768
self.attention_norm = LayerNorm(config.hidden_size, eps=1e-6)
self.ffn_norm = LayerNorm(config.hidden_size, eps=1e-6)
self.ffn = Mlp(config)
self.attn = Attention(config, vis)
def forward(self, x):
h = x
x = self.attention_norm(x)
x, weights = self.attn(x) # 返回注意力最终得分、注意力系数
x = x + h
h = x
x = self.ffn_norm(x)
x = self.ffn(x)
x = x + h
return x, weights
def load_from(self, weights, n_block):
ROOT = f"Transformer/encoderblock_{n_block}"
with torch.no_grad():
query_weight = np2th(weights[pjoin(ROOT, ATTENTION_Q, "kernel")]).view(self.hidden_size, self.hidden_size).t()
key_weight = np2th(weights[pjoin(ROOT, ATTENTION_K, "kernel")]).view(self.hidden_size, self.hidden_size).t()
value_weight = np2th(weights[pjoin(ROOT, ATTENTION_V, "kernel")]).view(self.hidden_size, self.hidden_size).t()
out_weight = np2th(weights[pjoin(ROOT, ATTENTION_OUT, "kernel")]).view(self.hidden_size, self.hidden_size).t()
query_bias = np2th(weights[pjoin(ROOT, ATTENTION_Q, "bias")]).view(-1)
key_bias = np2th(weights[pjoin(ROOT, ATTENTION_K, "bias")]).view(-1)
value_bias = np2th(weights[pjoin(ROOT, ATTENTION_V, "bias")]).view(-1)
out_bias = np2th(weights[pjoin(ROOT, ATTENTION_OUT, "bias")]).view(-1)
self.attn.query.weight.copy_(query_weight)
self.attn.key.weight.copy_(key_weight)
self.attn.value.weight.copy_(value_weight)
self.attn.out.weight.copy_(out_weight)
self.attn.query.bias.copy_(query_bias)
self.attn.key.bias.copy_(key_bias)
self.attn.value.bias.copy_(value_bias)
self.attn.out.bias.copy_(out_bias)
mlp_weight_0 = np2th(weights[pjoin(ROOT, FC_0, "kernel")]).t()
mlp_weight_1 = np2th(weights[pjoin(ROOT, FC_1, "kernel")]).t()
mlp_bias_0 = np2th(weights[pjoin(ROOT, FC_0, "bias")]).t()
mlp_bias_1 = np2th(weights[pjoin(ROOT, FC_1, "bias")]).t()
self.ffn.fc1.weight.copy_(mlp_weight_0)
self.ffn.fc2.weight.copy_(mlp_weight_1)
self.ffn.fc1.bias.copy_(mlp_bias_0)
self.ffn.fc2.bias.copy_(mlp_bias_1)
self.attention_norm.weight.copy_(np2th(weights[pjoin(ROOT, ATTENTION_NORM, "scale")]))
self.attention_norm.bias.copy_(np2th(weights[pjoin(ROOT, ATTENTION_NORM, "bias")]))
self.ffn_norm.weight.copy_(np2th(weights[pjoin(ROOT, MLP_NORM, "scale")]))
self.ffn_norm.bias.copy_(np2th(weights[pjoin(ROOT, MLP_NORM, "bias")]))
DecoderBlock类
class DecoderBlock(nn.Module):
def __init__(
self,
in_channels,
out_channels,
skip_channels=0,
use_batchnorm=True,
):
super().__init__()
self.conv1 = Conv2dReLU(
in_channels + skip_channels,
out_channels,
kernel_size=3,
padding=1,
use_batchnorm=use_batchnorm,
)
self.conv2 = Conv2dReLU(
out_channels,
out_channels,
kernel_size=3,
padding=1,
use_batchnorm=use_batchnorm,
)
self.up = nn.UpsamplingBilinear2d(scale_factor=2)
def forward(self, x, skip=None):
x = self.up(x)
if skip is not None:
x = torch.cat([x, skip], dim=1)
# 最后一步skip = None
x = self.conv1(x)
x = self.conv2(x)
return x
SegmentationHead类
class SegmentationHead(nn.Sequential):
def __init__(self, in_channels, out_channels, kernel_size=3, upsampling=1):
conv2d = nn.Conv2d(in_channels, out_channels, kernel_size=kernel_size, padding=kernel_size // 2)
upsampling = nn.UpsamplingBilinear2d(scale_factor=upsampling) if upsampling > 1 else nn.Identity()
# nn.Identity()作用
'''
nn.Identity 实际上是一个恒等映射(Identity Mapping),它的作用是将输入直接传递到输出,不做任何改变。这意味着任何通过 nn.Identity 的数据都会保持原样输出,相当于一个“无操作”(NOP)层。
'''
super().__init__(conv2d, upsampling)
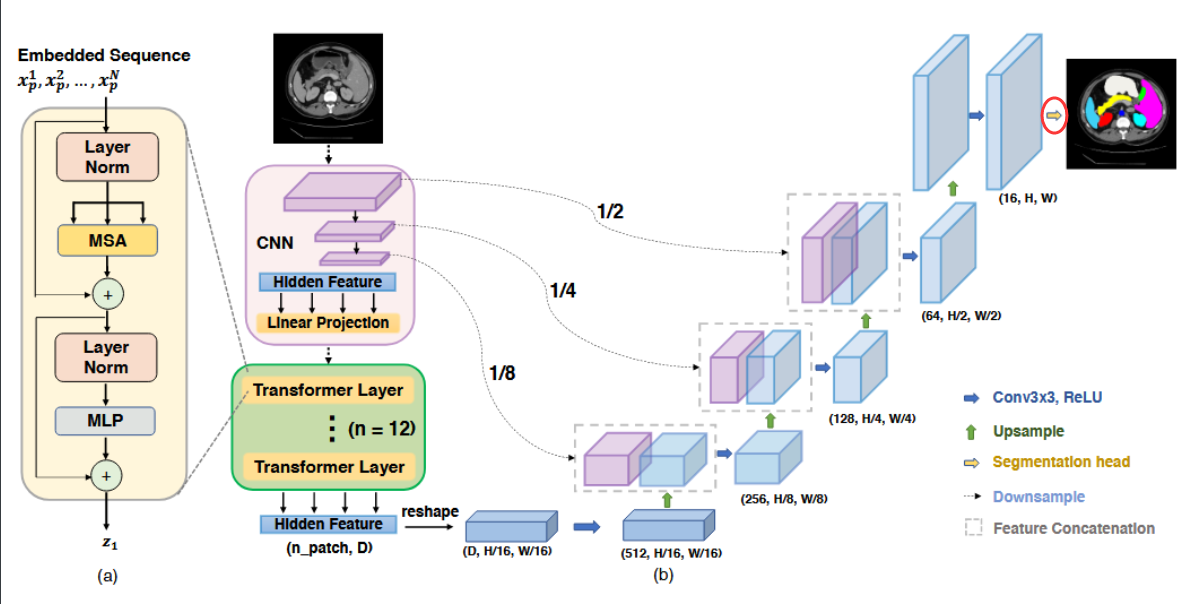
实际上,这里upsampling=1即,什么也不做,对应图片中最后一步
至此模型数理完毕

 浙公网安备 33010602011771号
浙公网安备 33010602011771号