线性代数基础知识
此处只补充部份线代内容,包括点乘、叉乘和正交。
向量点乘 Vector Dot Product
介绍点乘的基本概念,公式,以及应用。
两个向量点乘是一个标量,又是我们也会称其为两个向量的余弦相似度
公式:\(\vec{a} \cdot \vec{b} = ||\vec{a}|| ||\vec{b}|| \cos \theta\)
同时也可以获得两个向量的余弦角:\(\cos\theta = \dfrac{\vec{a}\cdot \vec{b}}{||\vec{a}|| ||\vec{b}||}\)
如果是单位向量的话,模长为1,于是有:\(\cos\theta = \vec{a}\cdot \vec{b}\)
笛卡尔坐标系下的点乘为逐点相乘后相加:
In 2d Cartesian Coordinates:
\[\vec{a} \cdot \vec{b} =
\begin{pmatrix}
x_a \\ y_a
\end{pmatrix} \cdot
\begin{pmatrix}
x_b \\ y_b
\end{pmatrix} =
x_a x_b + y_a y_b
\]
In 3d Cartesian Coordinates:
\[\vec{a} \cdot \vec{b} =
\begin{pmatrix}
x_a \\ y_a \\ z_a
\end{pmatrix} \cdot
\begin{pmatrix}
x_b \\ y_b \\ z_b
\end{pmatrix} =
x_a x_b + y_a y_b + z_az_b
\]
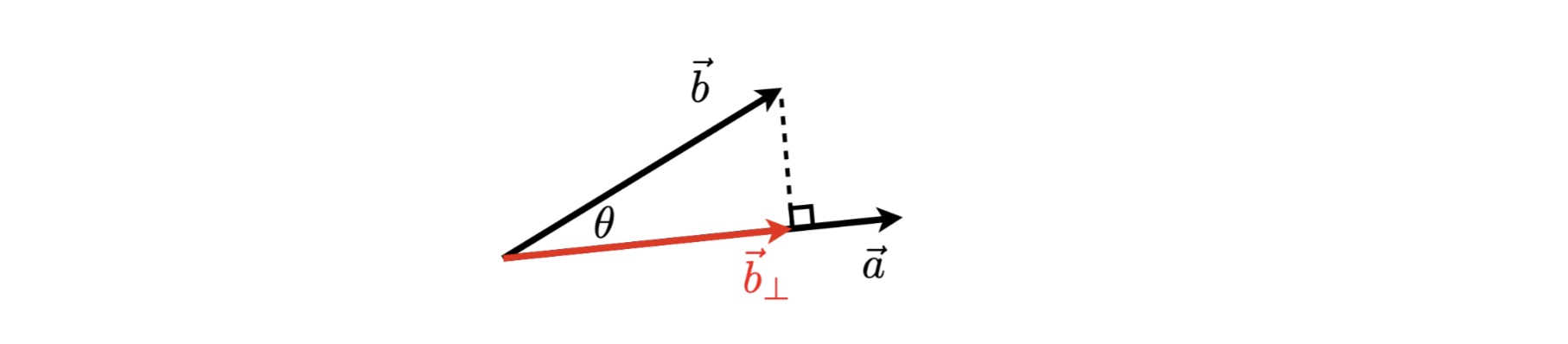
用点乘获得向量投影:
- \(\vec{b}_{\bot}\)表示向量\(\vec{b}\)在向量向量\(\vec{a}\)上的投影
- \(\vec{b}_{\bot}\)方向一定和\(\vec{a}\)的单位向量\(\hat{a}\)同向或反向:\(\vec{b}_{\bot} = k\hat{a}\)
- \(k\)具体值如下:
\[k = ||\vec{b}_{\bot}|| = ||\vec{b}|| \cos \theta
\]
点乘在图形学里的一些应用:
-
测量两个向量的方向差
用点乘公式获得余弦角。
-
分解向量:
利用投影将向量\(\vec{b}\)分解到向量\(\vec{a}\)的方向上,获得\(\vec{b}_\bot\),然后让\(\vec{b}\)减去该投影向量\(\vec{b}_\bot\)获得剩余向量\(\vec{b} - \vec{b}_\bot\),获得了\(\vec{b}\)的两组正交向量\(\vec{b}_\bot\)和\(\vec{b} - \vec{b}_\bot\)。
-
判断两个向量是否是前向/反向:
点乘的结果是正数,根据公式可知余弦角小于90度,表示两个向量都是前向的;相反如果结果是负数,说明余弦角大于90度,两个向量是反向的。

向量叉乘 Vector Cross Product

两个向量叉乘是一个向量,该向量正交于叉乘的两个向量,方向遵循右手定则,因此叉乘的顺序会改变方向。
叉乘向量的模长公式:\(||\vec{a} \times \vec{b}|| = ||\vec{a}|| ||\vec{b}|| \sin\phi\)
因此显然有:\(\vec{a} \times \vec{b} = -\vec{b} \times \vec{a}\), \(\vec{a} \times \vec{a} = \vec{0}\)
向量叉乘常常用于构建右手坐标系。
笛卡尔坐标系下的叉乘公式:
\[\vec{a} \times \vec{b} =
\begin{pmatrix}
y_a z_b - y_b z_a \\
z_a x_b - x_a z_b \\
x_a y_b - y_a x_b
\end{pmatrix} = A^{*} \vec{b} =
\begin{pmatrix}
0 & -z_a & y_a \\
z_a & 0 & -x_a \\
-y_a & x_a & 0
\end{pmatrix}
\begin{pmatrix}
x_b\\y_b\\z_b
\end{pmatrix}
\]
叉乘在图形学里的一些应用:
-
判断向量\(\vec{b}\)在向量\(\vec{a}\)的左侧还是右侧:
利用叉乘向量方向遵循右手定则来实现
-
判断一个点\(P\)是否在三角形\(\triangle ABC\)的内部:
按照顺时针或逆时针的顺序,分别叉乘:\(\vec{AP}\times \vec{AB}, \vec{BP}\times \vec{BC}, \vec{CP}\times \vec{CA}\)。如果这几个结果的正负号一致,即点永远在向量的一侧,则该点一定在三角形内部。(可以推广到凸多边形。

正交坐标系 Orthonormal Coordinate Frames
坐标系很重要,有了坐标系就可以表示一些空间中的点和向量了。
往往会存在许多坐标系:Global / Local / Model / parts of model (head, hands, ...)。
需要掌握在不同坐标系下进行相互变换transform。
3D空间中任意三个单位正交向量,满足:
\[\begin{matrix}
||\vec{u}|| + ||\vec{v}|| + ||\vec{w}|| = 1 \\
\vec{u} \cdot \vec{v} = \vec{v} \cdot \vec{w} = \vec{w} \cdot \vec{u} = 0 \\
\vec{w} = \vec{u} \times \vec{v} \quad \text{right-handed}
\end{matrix}
\]
都可以作为一组正交坐标系。
任意向量\(\vec{p}\)都可以被一组正交坐标系唯一表示:
\[\begin{matrix}
\vec{p} = \underbrace{(\vec{p} \cdot \vec{u})}\vec{u} +
(\vec{p} \cdot \vec{v}) \vec{v} +
(\vec{p} \cdot \vec{w}) \vec{w} \end{matrix}
\]
其中\(\vec{p} \cdot \vec{u}\)表示向量\(\vec{p}\)在单位向量\(\vec{u}\)上的投影。
坐标变换
2D坐标变换
我们可以用一个2x2的矩阵对一个2D向量进行变换:
\[\begin{pmatrix}
a_{11} & a_{12}\\ a_{21} & a_{22}
\end{pmatrix}
\begin{pmatrix}
x \\ y
\end{pmatrix} =
\begin{pmatrix}
a_{11}x + a_{12}y\\ a_{21}x + a_{22}y
\end{pmatrix}
\]
上述这种,输入一个2D向量,通过一个简单的矩阵乘法后,输出另一个2D向量的做法称为线性变换。一般来说,我们会考虑沿着x轴或y轴完成一些操作。
Scaling 拉伸
常用的一种变换就是沿着一个坐标系进行拉伸scaling:
\[\operatorname{scale}(s_x,s_y)
\begin{pmatrix}
x \\ y
\end{pmatrix} =
\begin{pmatrix}
s_x & 0\\ 0 & s_y
\end{pmatrix}
\begin{pmatrix}
x \\ y
\end{pmatrix} =
\begin{pmatrix}
s_x x \\ s_y y
\end{pmatrix}
\]

Shearing 切变
切变变换类似于你把一副卡牌推开的样子,最下面保持不动,越靠近顶部移动的越多。
\[\operatorname{shear-x}(s) =
\begin{pmatrix}
1 & s\\ 0 & 1
\end{pmatrix}, \quad
\operatorname{shear-y}(s) =
\begin{pmatrix}
1 & 0\\ s & 1
\end{pmatrix}
\]

Rotation 旋转
定义绕着原点逆时针旋转\(\phi\)的变换如下:
\[\operatorname{rotate}(\phi)
\begin{pmatrix}
x \\ y
\end{pmatrix} =
\begin{pmatrix}
\cos\phi & -\sin\phi \\ \sin\phi & \cos\phi
\end{pmatrix}
\begin{pmatrix}
x \\ y
\end{pmatrix} =
\begin{pmatrix}
x\cos\phi - y\sin\phi \\
x\sin\phi + y\cos\phi
\end{pmatrix}
\]
简单推导:假设原始向量\((x_a,y_a)\)和x轴正方向的夹角为\(\alpha\),令向量的模长为\(r = \sqrt{x_a^2 + y_a^2}\),于是有:
\[\begin{cases}
x_a = r \cos\alpha \\
y_a = r \sin\alpha
\end{cases}
\]
则对于逆时针旋转\(\phi\)后的向量\((x_b,y_b)\),有:
\[\begin{cases}
x_b = r \cos(\alpha+\phi) = r\cos\alpha \cos\phi - r\sin\alpha\sin\phi = x_a\cos\phi - y_a\sin\phi\\
y_b = r \sin(\alpha+\phi) = r\sin\alpha\cos\phi + r\cos\alpha\sin\phi =x_a\sin\phi + y_a\cos\phi
\end{cases}
\]
得证。

Relection 反射
沿着x轴或y轴镜像反射:
\[\operatorname{reflect-y}(s) =
\begin{pmatrix}
-1 & 0\\ 0 & 1
\end{pmatrix}, \quad
\operatorname{reflect-x}(s) =
\begin{pmatrix}
1 & 0\\ 0 & -1
\end{pmatrix}
\]

齐次坐标系
齐次坐标系是用来解决translation不能写进矩阵变换的问题的,如放射变换:
\[\begin{pmatrix}
x' \\ y'
\end{pmatrix} =
\begin{pmatrix}
a & b \\ c & d
\end{pmatrix}
\begin{pmatrix}
x \\ y
\end{pmatrix} +
\begin{pmatrix}
t_x \\ t_y
\end{pmatrix}
\]
我们不想让translation操作变成一种特例,想要和前面的linear transform保持一致,于是有了齐次坐标系的概念:
\[\begin{cases}
\text{2D point} &= (x, y, \color{red}1 \color{black}) \\
\text{2D vector} &= (x, y, \color{red}0 \color{black}) \\
\end{cases}
\]
这里可以简单理解为,点移动是会改变坐标的,但是向量移动后,还是会以原点为起点保持不变。
这也与如下规定保持了一致:
\[\begin{matrix}
&向量 &+ &向量 &= &向量 \\
&点 &- &点 &= &向量 \\
&点 &+ &向量 &= &点 \\
&点 &+ &点 &= &点
\end{matrix}
\]
在齐次坐标系中,\(\begin{pmatrix}
x \\ y \\ w
\end{pmatrix} = \begin{pmatrix}
x / w \\ y / w \\ 1
\end{pmatrix}\) 表示的是同一个点。\((w\ne 0)\)
于是translation matrix就有了:
\[\begin{pmatrix}
x' \\ y' \\ 1
\end{pmatrix} =
\begin{pmatrix}
1 & 0 & t_x \\
0 & 1 & t_y \\
0 & 0 & 1
\end{pmatrix}
\begin{pmatrix}
x \\ y \\ 1
\end{pmatrix} =
\begin{pmatrix}
x + t_x \\ y + t_y \\ 1
\end{pmatrix}
\]
Affine transformation = linear map + translation
\[\begin{pmatrix}
x' \\ y'
\end{pmatrix} =
\begin{pmatrix}
a & b \\ c & d
\end{pmatrix}
\begin{pmatrix}
x \\ y
\end{pmatrix} +
\begin{pmatrix}
t_x \\ t_y
\end{pmatrix}
\]
用了齐次坐标系以后,我们就可以写成:
\[\begin{pmatrix}
x' \\ y' \\ w'
\end{pmatrix} =
\begin{pmatrix}
a & b & t_x \\ c & d & t_y \\ 0 & 0 & 1
\end{pmatrix}
\begin{pmatrix}
x \\ y \\ 1
\end{pmatrix}
\]
同理有scaling,rotation等,不一一写了。
分解一些复杂的变换
可以简单拆分成三步:
- 把要旋转的点translate到坐标原点
- rotate
- translate回去
3D坐标变换
同样使用齐次坐标系:
\[\begin{cases}
\text{3D point} &= (x, y, z, \color{red}1 \color{black}) \\
\text{3D vector} &= (x, y, z, \color{red}0 \color{black}) \\
\end{cases}
\]
Affine Transformation:
\[\begin{pmatrix}
x' \\ y' \\ z' \\ 1
\end{pmatrix} =
\begin{pmatrix}
a & b & c & t_x \\ d & e & f & t_y \\ g & h & i & t_z\\ 0 & 0 & 0 & 1
\end{pmatrix}
\begin{pmatrix}
x \\ y \\ z \\ 1
\end{pmatrix}
\]



 浙公网安备 33010602011771号
浙公网安备 33010602011771号