W4算法基于背景建模的运动目标检测
W4算法对每个像素点统计三个特征值:最小灰度值、最大灰度值以及最大帧间差分值。所有像素点的特征值就构成了背景模型,比较当前帧与背景模型就能检测出运动的目标。具体步骤可分为三部分:模型初始化、目标检测以及模型更新。
模型初始化:首先遍历初始数帧,并对每个像素点计算灰度中值和标准差,然后计算每个像素点帧间灰度变化的最大值、最小值以及最大帧间差分值。计算时间过长,没有进行优化。

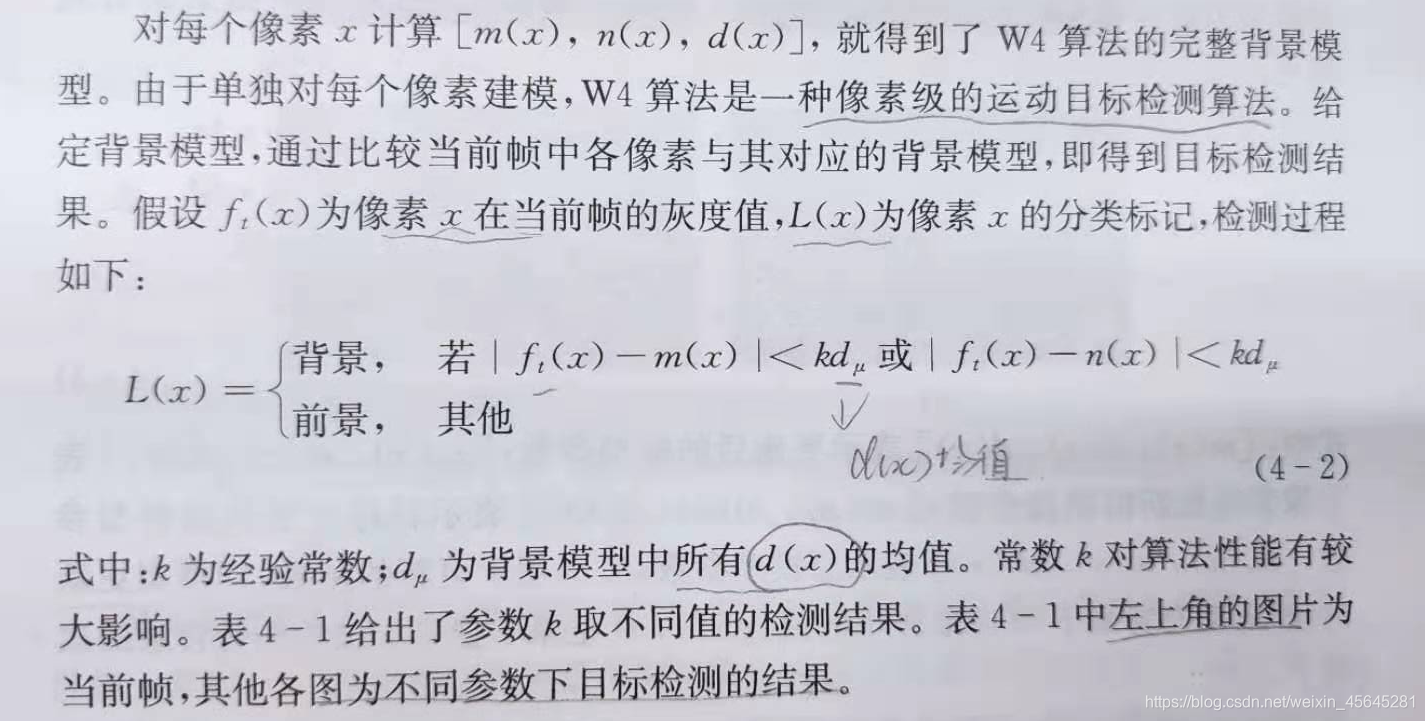
目标检测:
#include <iostream>
#include<opencv2/opencv.hpp>
#include <vector>
using namespace cv;
using namespace std;
//每个像素的灰度中值
bool comp(int x, int y)
{
return x > y;
}
void sort_vector(vector <int> v)
{
sort(v.begin(), v.end(), comp);
}
//每个像素的灰度值标准差
double mean(vector <int> v) {
double ans = 0.0;
for (int i = 0; i < v.size(); i++) {
ans += v[i];
}
ans = ans / v.size();
return ans;
}
double vector_stddev(vector <int> v) {
double a1 = mean(v);
double a2 = 0.0;
for (int i = 0; i < v.size(); i++) {
a2 = (a1 - v[i]) * (a1 - v[i]);
}
a2 = sqrt(a2 / v.size());
return a2;
}
//相邻帧像素灰度差分值
int vector_diff(vector <int> v) {
vector<int> temp;
for (int i = 0; i < v.size()-1; i++) {
int result = abs(v[i + 1] - v[i]);
temp.push_back(result);
}
int max = *max_element(temp.begin(), temp.end()); ;
return max;
}
//相邻帧像素灰度差分值的平均值
double mean_diff(vector <int> v) {
vector<int> temp;
for (int i = 0; i < v.size() - 1; i++) {
int result = abs(v[i + 1] - v[i]);
temp.push_back(result);
}
double a1 = mean(temp);
return a1;
}
int main()
{
VideoCapture capture;
Mat frame,framegray,result;
//保存目标轨迹
std::vector<Point> pt;
//capture.open(0);
frame = capture.open("D:/testimage/video/fish.mp4"); //F:/opencv/sources/amples/data/vtest.avi D:/testimage/CXK.avi D:/testimage/video/fish.mp4
if (!capture.isOpened())
{
printf("can not open camera \n");
return -1;
}
int iVideoTime = capture.get(CAP_PROP_FRAME_COUNT); // capture.get(CAP_PROP_FPS);
int Frame_start= capture.get(CAP_PROP_POS_FRAMES);
capture.read(frame);
vector <double> all_diff;
cvtColor(frame, result, COLOR_RGB2GRAY);
//namedWindow("input", WINDOW_AUTOSIZE);
for (int i = 0; i < frame.rows; i++)
{
vector <int> v_median;
for (int j = 0; j < frame.cols; j++)
{
//temp1.push_back(gray_value);
while (capture.read(frame) && Frame_start < 20)
{
cvtColor(frame, framegray, COLOR_RGB2GRAY);
int gray_value = framegray.at<uchar>(i, j);
//cout << gray_value << endl;
v_median.push_back(gray_value);
Frame_start++;
//imshow("input", frame);
//waitKey(10);
}
/*判断当前像素与灰度中值差值的绝对值是否小于2倍标准差*/
double temp = vector_stddev(v_median);
double error = abs(framegray.at<uchar>(i, j) - v_median[v_median.size() / 2.0]) - 2 * temp;
if (error < 0) {
int diff = vector_diff(v_median);
double Mean_diff = mean_diff(v_median);
cout << "d(x)相邻帧像素差分值:" << diff << endl;
cout << "d(x)相邻帧像素差分值的平均值:" << Mean_diff << endl;
sort_vector(v_median);
cout << "m(x)最大值:" << v_median[0] << endl;
cout << "n(x)最小值:" << v_median[v_median.size() - 1] << endl;
cout << "坐标(" << i << "," << j << ")的灰度中值:" << v_median[v_median.size() / 2.0] << endl;
cout << "坐标(" << i << "," << j << ")的灰度标准差:" << temp << endl;
cout << "error:" << error << endl;
int gray_value = framegray.at<uchar>(i, j);
if (abs(gray_value - v_median[0]) < 2 * Mean_diff || abs(gray_value - v_median[v_median.size() - 1]) < 2 * Mean_diff) {
result.at<uchar>(i, j) = 0;
}
else
{
result.at<uchar>(i, j) = 255;
}
}
Frame_start = 0;
frame = capture.open("D:/testimage/video/fish.mp4");
cvtColor(frame, framegray, COLOR_RGB2GRAY);
}
cout << "--------"<< i <<"---------" << endl;
Frame_start = 0;
frame = capture.open("D:/testimage/video/fish.mp4");
cvtColor(frame, framegray, COLOR_RGB2GRAY);
}
namedWindow("result", WINDOW_AUTOSIZE);
imshow("result", result);
capture.release();
system("pause");
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号