Pytorch小试牛刀:CIFAR-10分类
下面我们来尝试实现对CIFAR-10数据集的分类,步骤如下:
1.使用torchvision加载并预处理CIFAR-10数据集
2.定义网络
3.定义损失函数和优化器
4.训练网络并更新网络参数
5.测试网络
CIFAR-10数据加载及预处理
CIFAR-101是一个常用的彩色图片数据集,它有10个类别: 'airplane', 'automobile', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck'。每张图片都是33232,也即3-通道彩色图片,分辨率32*32。
import torchvision as tv
import torchvision.transforms as transforms
from torchvision.transforms import ToPILImage
import torch as t
show = ToPILImage() # 可以把Tensor转成Image,方便可视化
# 第一次运行程序torchvision会自动下载CIFAR-10数据集,
# 大约100M,需花费一定的时间,
# 如果已经下载有CIFAR-10,可通过root参数指定
# 定义对数据的预处理
transform = transforms.Compose([
transforms.ToTensor(), # 转为Tensor
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)), # 归一化
])
# 训练集
trainset = tv.datasets.CIFAR10(
root='D:\\dtset',
train=True,
download=True,
transform=transform)
trainloader = t.utils.data.DataLoader(
trainset,
batch_size=4,
shuffle=True,
num_workers=2)
# 测试集
testset = tv.datasets.CIFAR10(
'D:\\dtset',
train=False,
download=True,
transform=transform)
testloader = t.utils.data.DataLoader(
testset,
batch_size=4,
shuffle=False,
num_workers=2)
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
下载地址: https://www.cs.toronto.edu/~kriz/cifar-10-python.tar.gz
Dataset对象是一个数据集,可以按下标访问,返回形如(data, label)的数据。
(data, label) = trainset[100]
print(classes[label])
# (data + 1) / 2是为了还原被归一化的数据
show((data + 1) / 2).resize((100, 100))

Dataloader是一个可迭代的对象,它将dataset返回的每一条数据拼接成一个batch,并提供多线程加速优化和数据打乱等操作。当程序对dataset的所有数据遍历完一遍之后,相应的对Dataloader也完成了一次迭代。
dataiter = iter(trainloader)
images, labels = dataiter.next() # 返回4张图片及标签
print(' '.join('%11s'%classes[labels[j]] for j in range(4)))
show(tv.utils.make_grid((images+1)/2)).resize((400,100))
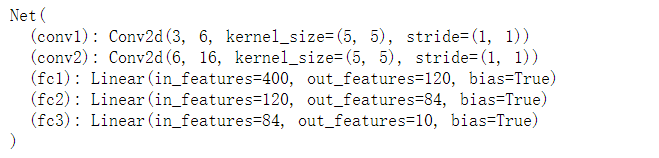
定义网络
拷贝上面的LeNet网络,修改self.conv1第一个参数为3通道,因CIFAR-10是3通道彩图。
import torch.nn as nn
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16*5*5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = F.max_pool2d(F.relu(self.conv1(x)), (2, 2))
x = F.max_pool2d(F.relu(self.conv2(x)), 2)
x = x.view(x.size()[0], -1)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
net = Net()
print(net)
定义损失函数和优化器(loss和optimizer)
from torch import optim
criterion = nn.CrossEntropyLoss() # 交叉熵损失函数
optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)
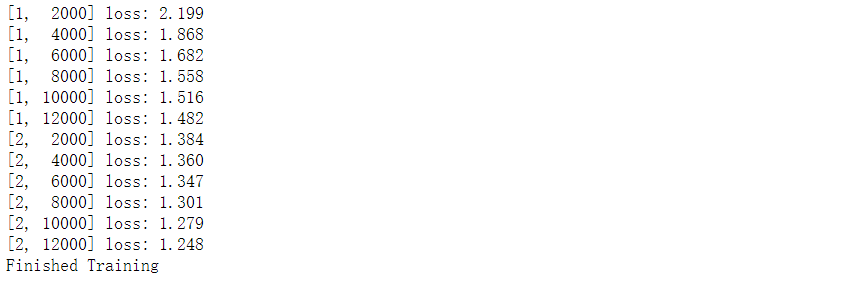
训练网络
所有网络的训练流程都是类似的,不断地执行如下流程:
- 输入数据
- 前向传播+反向传播
- 更新参数
t.set_num_threads(8)
for epoch in range(2):
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
# 输入数据
inputs, labels = data
# 梯度清零
optimizer.zero_grad()
# forward + backward
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
# 更新参数
optimizer.step()
# 打印log信息
# loss 是一个scalar,需要使用loss.item()来获取数值,不能使用loss[0]
running_loss += loss.item()
if i % 2000 == 1999: # 每2000个batch打印一下训练状态
print('[%d, %5d] loss: %.3f' \
% (epoch+1, i+1, running_loss / 2000))
running_loss = 0.0
print('Finished Training')
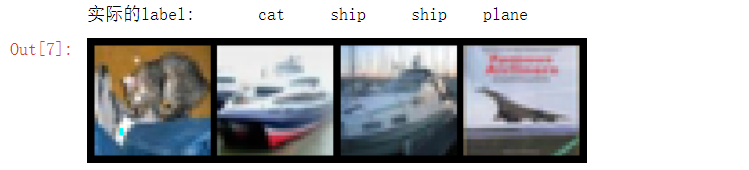
此处仅训练了2个epoch(遍历完一遍数据集称为一个epoch),来看看网络有没有效果。将测试图片输入到网络中,计算它的label,然后与实际的label进行比较。
dataiter = iter(testloader)
images, labels = dataiter.next() # 一个batch返回4张图片
print('实际的label: ', ' '.join(\
'%08s'%classes[labels[j]] for j in range(4)))
show(tv.utils.make_grid(images / 2 - 0.5)).resize((400,100))
接着计算网络预测的label:
# 计算图片在每个类别上的分数
outputs = net(images)
# 得分最高的那个类
_, predicted = t.max(outputs.data, 1)
print('预测结果: ', ' '.join('%5s'\
% classes[predicted[j]] for j in range(4)))

已经可以看出效果,准确率100%,但这只是一部分的图片,再来看看在整个测试集上的效果。
correct = 0 # 预测正确的图片数
total = 0 # 总共的图片数
# 由于测试的时候不需要求导,可以暂时关闭autograd,提高速度,节约内存
with t.no_grad():
for data in testloader:
images, labels = data
outputs = net(images)
_, predicted = t.max(outputs, 1)
total += labels.size(0)
correct += (predicted == labels).sum()
print('10000张测试集中的准确率为: %d %%' % (100 * correct // total))

10000张测试集中的准确率为: 54 %
训练的准确率远比随机猜测(准确率10%)好,证明网络确实学到了东西。
在GPU上训练
就像之前把Tensor从CPU转到GPU一样,模型也可以类似地从CPU转到GPU。
device = t.device("cuda:0" if t.cuda.is_available() else "cpu")
net.to(device)
images = images.to(device)
labels = labels.to(device)
output = net(images)
loss= criterion(output,labels)
loss

如果发现在GPU上并没有比CPU提速很多,实际上是因为网络比较小,GPU没有完全发挥自己的真正实力。
对PyTorch的基础介绍至此结束。总结一下,主要包含以下内容。
Tensor: 类似Numpy数组的数据结构,与Numpy接口类似,可方便地互相转换。
autograd/Variable: 为tensor提供自动求导功能。
nn: 专门为神经网络设计的接口,提供了很多有用的功能(神经网络层,损失函数,优化器等)。
神经网络训练: 以CIFAR-10分类为例演示了神经网络的训练流程,包括数据加载、网络搭建、训练及测试。
通过本节的学习,相信读者可以体会出PyTorch具有接口简单、使用灵活等特点。从下一章开始将深入系统地讲解PyTorch的各部分知识。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号