电子设计基础训练 思考8
本系列给出了作者在课程学习中遇到的问题,并给出自己的思考成果以供大家参考。能力有限,如遇文中有错误、不当之处烦请批评指正。更多问题欢迎在评论区交流!
本文少部分内容引用了互联网上的资料,出处不再一一标明。
一、已知X波段雷达脉冲宽度为4us,发射机占空比为1%,峰值功率为100kW,求该雷达的脉冲重复频率和雷达发射机的平均功率
根据公式:占空比=脉冲宽度×脉冲重复频率,计算得到脉冲重复频率=2500Hz=2.5kHz。
根据公式:平均功率=峰值功率×占空比,计算得到平均功率=1kW。
二、线性调频脉冲信号的脉冲宽度为τ=10ms、带宽为B=1GHz,计算其脉冲压缩前后的距离分辨率
根据距离分辨率公式:ΔR=c×τ/2=c/(2B),计算得到压缩前ΔR=1.5×106m,压缩后ΔR=0.15m。
三、雷达系统的主要组成包括哪些部分?简述各部分的主要功能
雷达系统通常包括:波形产生器、发射机、接收机、A/D变换、信号处理、数据处理、显示器、信息存储与传输、天线及其伺服装置、电源等部分。
- 波形产生器,产生一定工作频率、一定调制方式的射频激励信号,也称为激励源,同时,产生相干本振信号送给接收机;
- 发射机,对激励源提供的射频激励信号进行功率放大,再经收发开关馈电至天线,由天线辐射出去;
- 接收机,目标回波信号经天线和收发开关至接收机,再由接收机对接收信号进行低噪声放大、混频和滤波等处理;
- 信号处理,作用是抑制非期望信号(杂波、干扰),通过相干积累或非相干积累等措施以提高有用信号的信噪比,并对目标进行自动检测与跟踪等;
- 数据处理,通常将目标航迹的关联、跟踪滤波、航迹管理等称为雷达的数据处理。
四、毫米波雷达与激光雷达、摄像头相比有哪些特点?毫米波雷达在无人驾驶领域有哪些应用?
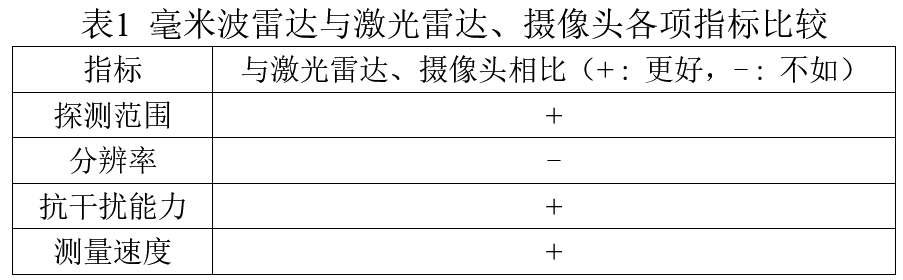
毫米波雷达在无人驾驶领域可用于障碍物探测与跟踪、目标识别、车内环境检测等,为自动驾驶车辆提供自动巡航、紧急避障、盲区探测、变道辅助、倒车提示等功能。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号