【学习笔记】卷积神经网络
人工神经网络VS卷积神经网络
- 参数太多,在cifar-10的数据集中,只有32*32*3,就会有这么多权重,如果说更大的图片,比如200*200*3就需要120000多个,这完全是浪费。
- 没有利用像素之间位置信息,对于图像识别任务来说,每个像素与周围的像素都是联系比较紧密的。
- 网络层数限制 我们知道网络层数越多其表达能力越强,但是通过梯度下降方法训练深度人工神经网络很困难,因为全连接神经网络的梯度很难传递超过3层。因此,我们不可能得到一个很深的全连接神经网络,也就限制了它的能力。
那么,卷积神经网络又是怎样解决这个问题的呢?主要有三个思路:
- 局部连接:这个是最容易想到的,每个神经元不再和上一层的所有神经元相连,而只和一小部分神经元相连。这样就减少了很多参数。
- 权值共享:一组连接可以共享同一个权重,而不是每个连接有一个不同的权重,这样又减少了很多参数。
- 下采样:可以使用Pooling来减少每层的样本数,进一步减少参数数量,同时还可以提升模型的鲁棒性。对于图像识别任务来说,卷积神经网络通过尽可能保留重要的参数,去掉大量不重要的参数,来达到更好的学习效果
卷积神经网络CNN
卷积神经网络与上一篇文章中的普通神经网络非常相似:它们由具有学习权重和偏差的神经元组成。每个神经元接收一些输入,执行点积,并且可选地以非线性跟随它。整个网络仍然表现出单一的可微分评分功能:从一端的原始图像像素到另一个类的分数。并且在最后(完全连接)层上它们仍然具有损失函数(例如SVM / Softmax),并且我们为学习正常神经网络开发的所有技巧/技巧仍然适用。
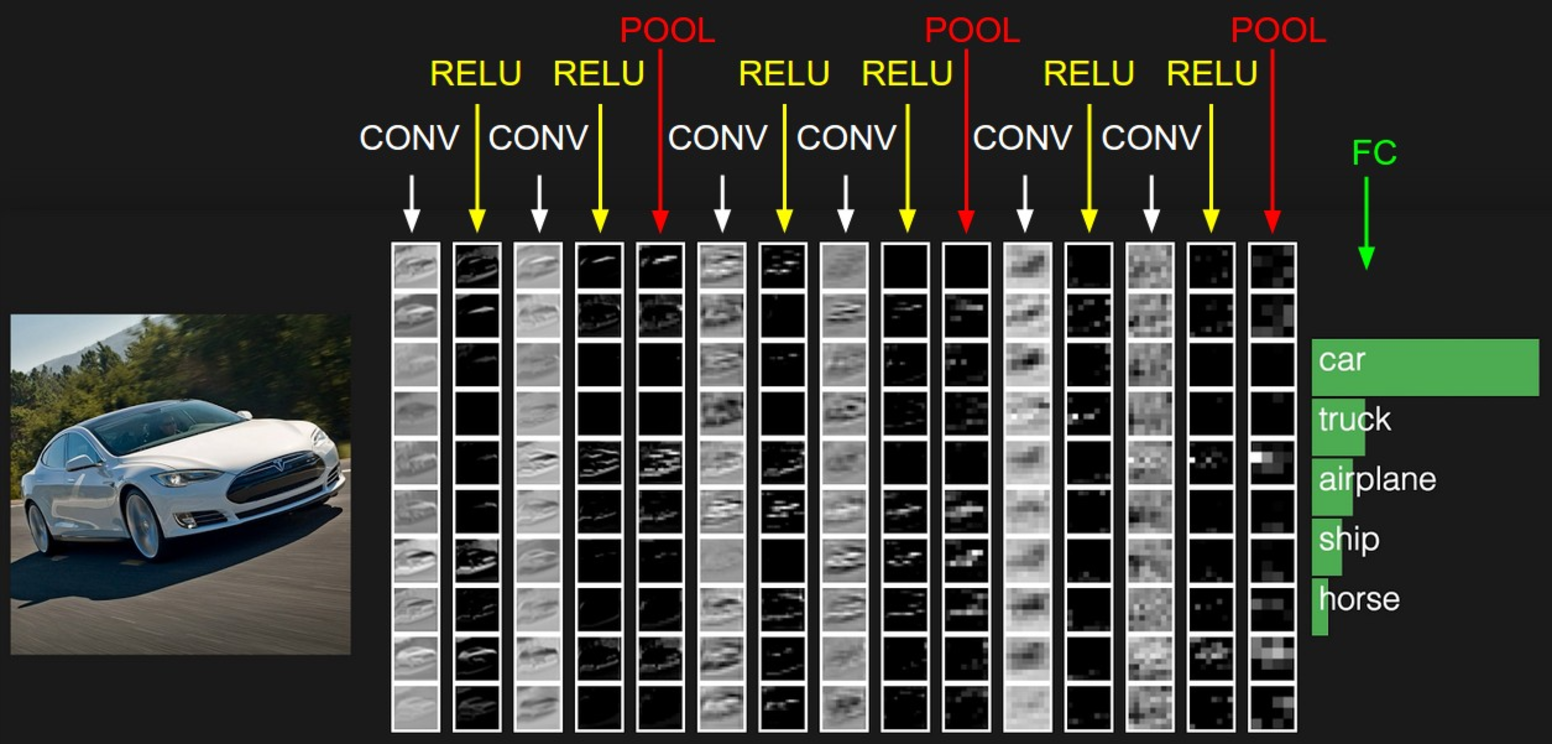
CNN每一层都通过可微分的函数将一个激活的值转换为另一个,一般来说CNN具有卷积层,池化层和完全连接层FC(正如在常规神经网络中所见),在池化层之前一般会有个激活函数,我们将堆叠这些层,形成一个完整的架构。我们先看下大概的一个图:

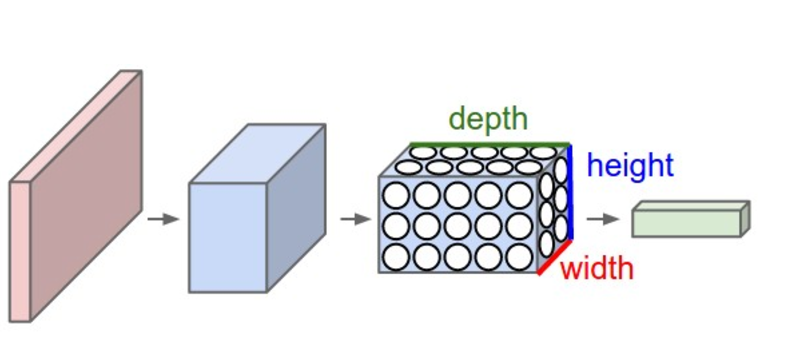
CNN它将一个输入3D体积变换为输出3D体积,正常的神经网络不同,CNN具有三维排列的神经元:宽度,高度,深度。
卷积层

参数及结构
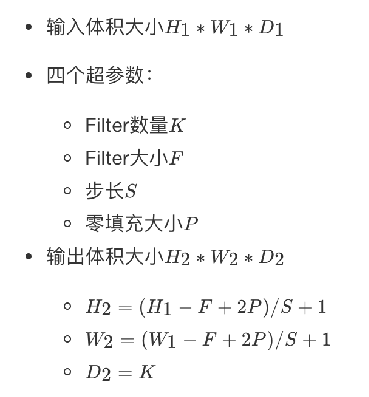
四个超参数控制输出体积的大小:过滤器大小,深度,步幅和零填充。得到的每一个深度也叫一个Feature Map。
卷积层的处理:在卷积层有一个重要的就是过滤器大小(需要自己指定),若输入值是一个[32x32x3]的大小(例如RGB CIFAR-10彩色图像)。如果每个过滤器(Filter)的大小为5×5,则CNN层中的每个Filter将具有对输入体积中的[5x5x3]区域的权重,总共5 *5* 3 = 75个权重(和+1偏置参数),输入图像的3个深度分别与Filter的3个深度进行运算。请注意,沿着深度轴的连接程度必须为3,因为这是输入值的深度,并且也要记住这只是一个Filter。
- 假设输入卷的大小为[16x16x20]。然后使用3x3的示例接收字段大小,CNN中的每个神经元现在将具有总共3 *3* 20 = 180个连接到输入层的连接。
卷积层的输出深度:那么一个卷积层的输出深度是可以指定的,输出深度是由你本次卷积中Filter的个数决定。加入上面我们使用了64个Filter,也就是[5,5,3,64],这样就得到了64个Feature Map,这样这64个Feature Map可以作为下一次操作的输入值。
卷积层的输出宽度:输出宽度可以通过特定算数公式进行得出,后面会列出公式。
卷积输出值的计算
我们用一个简单的例子来讲述如何计算卷积,然后,我们抽象出卷积层的一些重要概念和计算方法。
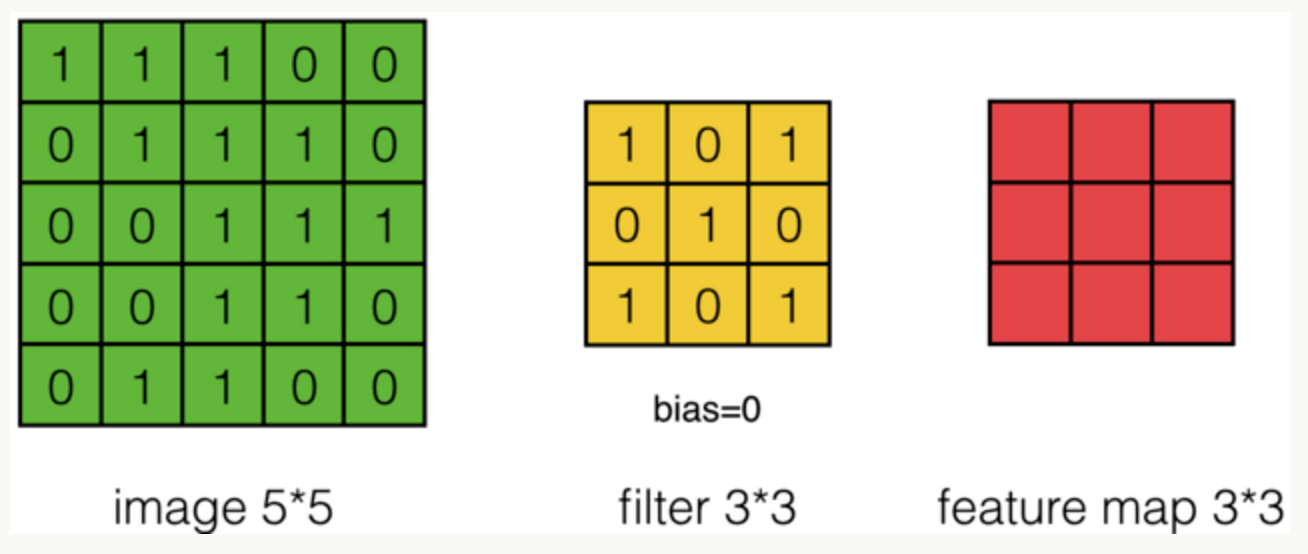
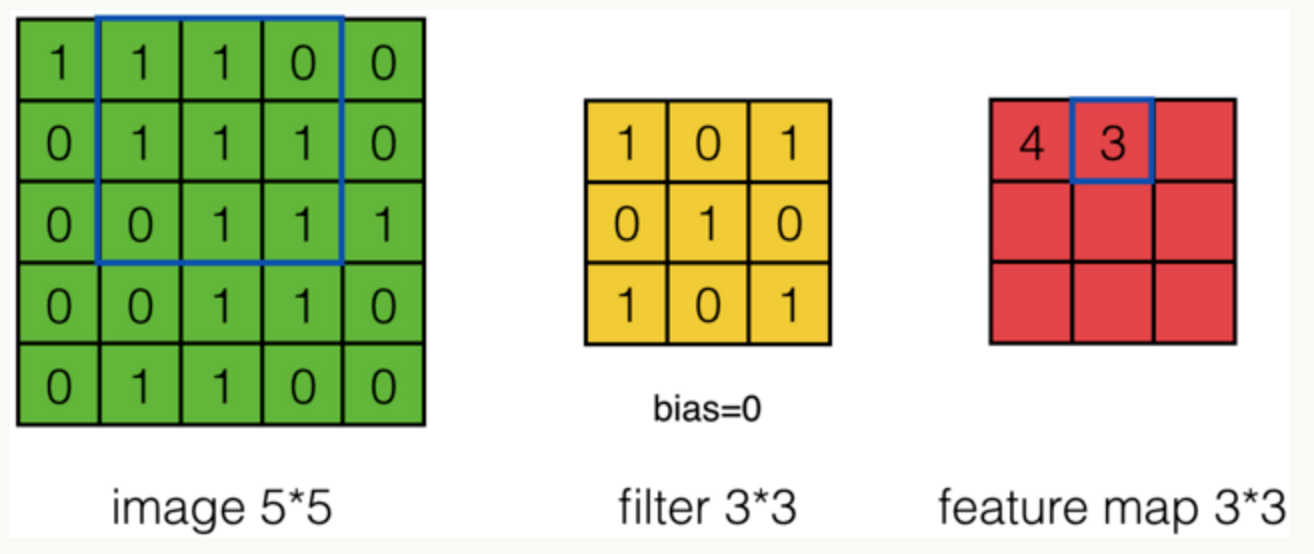
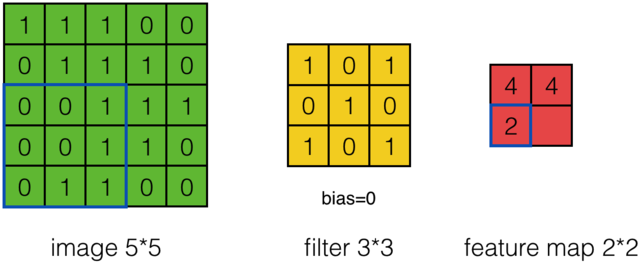
假设有一个5*5的图像,使用一个3*3的filter进行卷积,得到了到一个3*3的Feature Map,至于得到3*3大小,可以自己去计算一下。如下所示:
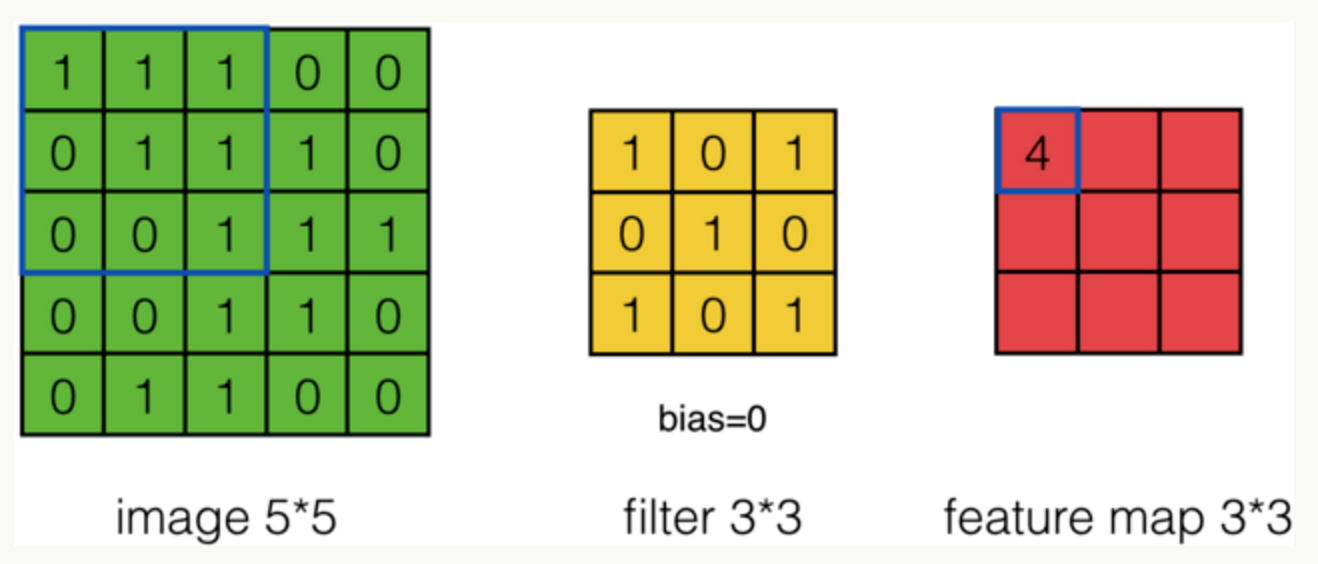
我们看下它的计算过程,首先计算公式如下:

根据计算的例子,第一次:
第二次:
通过这样我们可以依次计算出Feature Map中所有元素的值。下面的动画显示了整个Feature Map的计算过程:
步长
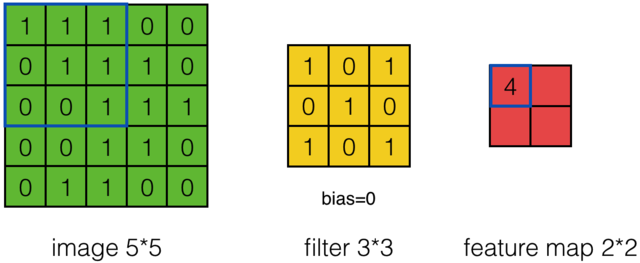
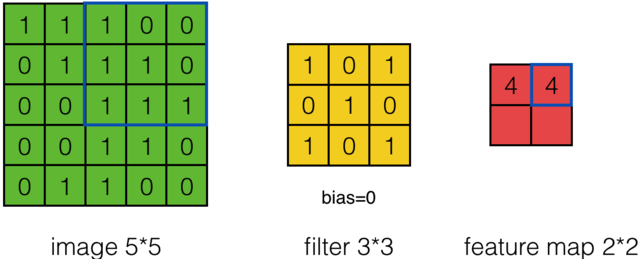
那么在卷积神经网络中有一个概念叫步长,也就是Filter移动的间隔大小。上面的计算过程中,步幅(stride)为1。步幅可以设为大于1的数。例如,当步幅为2时,我们可以看到得出2*2大小的Feature Map,发现这也跟步长有关。Feature Map计算如下:

外围补充与多Filter
我们前面还曾提到,每个卷积层可以有多个filter。每个filter和原始图像进行卷积后,都可以得到一个Feature Map。因此,卷积后Feature Map的深度(个数)和卷积层的filter个数是相同的。
如果我们的步长移动与filter的大小不适合,导致不能正好移动到边缘怎么办?

以上就是卷积层的计算方法。这里面体现了局部连接和权值共享:每层神经元只和上一层部分神经元相连(卷积计算规则),且filter的权值对于上一层所有神经元都是一样的。
总结输出大小
卷积网络API
tf.nn.conv2d(input, filter, strides=, padding=, name=None):
- 计算给定4-D input和filter张量的2维卷积
- input:给定的输入张量,具有[batch,heigth,width,channel],类型为float32,64
- filter:指定过滤器的大小,[filter_height, filter_width, in_channels, out_channels]
- strides:strides = [1, stride, stride, 1],步长
- padding:“SAME”, “VALID”,使用的填充算法的类型,使用“SAME”。其中”VALID”表示滑动超出部分舍弃,“SAME”表示填充,使得变化后height,width一样大
新的激活函数-Relu
一般在进行卷积之后就会提供给激活函数得到一个输出值。我们不使用sigmoid,softmax,而使用Relu。该激活函数的定义是:
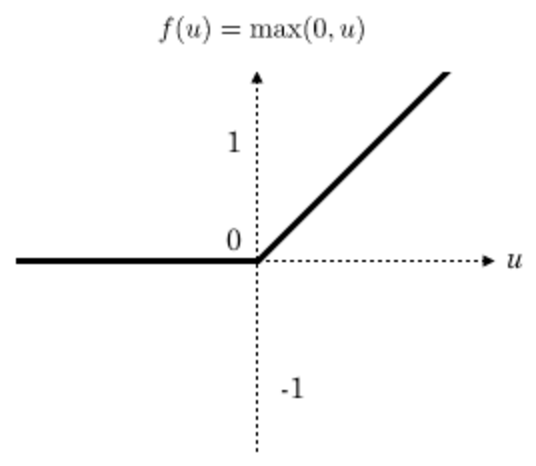
Relu函数如下:
特点
- 速度快,和sigmoid函数需要计算指数和倒数相比,relu函数其实就是一个max(0,x),计算代价小很多
- 稀疏性,通过对大脑的研究发现,大脑在工作的时候只有大约5%的神经元是激活的,而采用sigmoid激活函数的人工神经网络,其激活率大约是50%。有论文声称人工神经网络在15%-30%的激活率时是比较理想的。因为relu函数在输入小于0时是完全不激活的,因此可以获得一个更低的激活率。
rule激活函数API
tf.nn.relu(features, name=None)
- features:卷积后加上偏置的结果
- return:结果
Pooling计算
Pooling层主要的作用是特征提取,通过去掉Feature Map中不重要的样本,进一步减少参数数量。Pooling的方法很多,最常用的是Max Pooling。
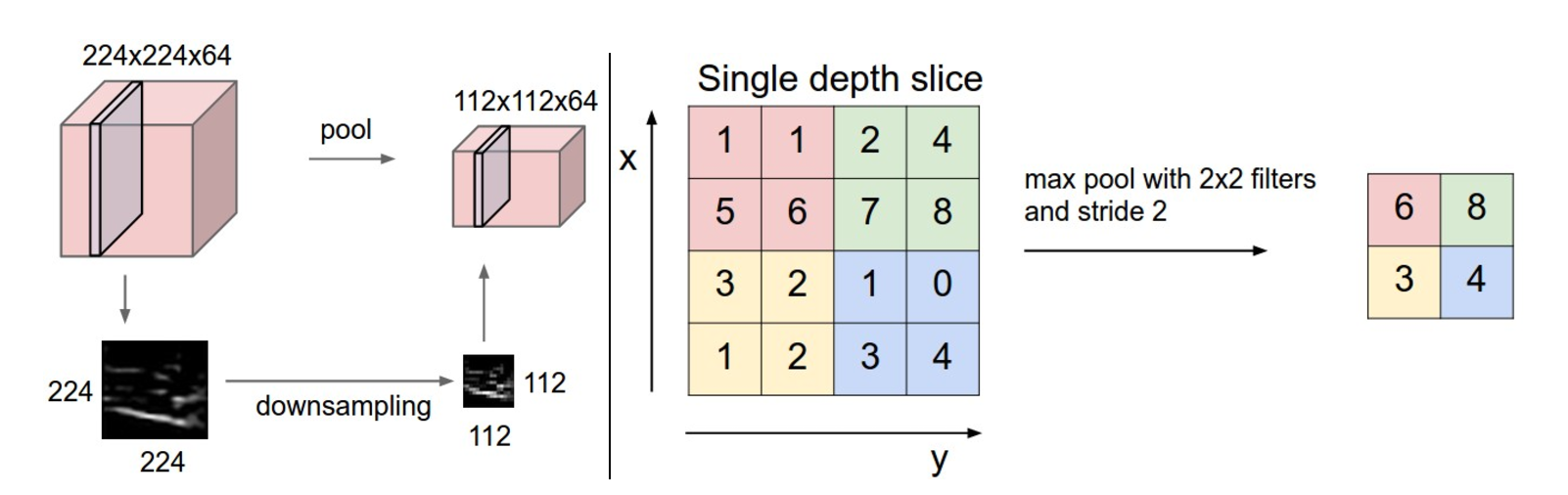
除了Max Pooing之外,常用的还有Mean Pooling——取各样本的平均值。对于深度为D的Feature Map,各层独立做Pooling,因此Pooling后的深度仍然为D。
Pooling API
tf.nn.max_pool(value, ksize=, strides=, padding=,name=None)
- 输入上执行最大池数
- value:4-D Tensor形状[batch, height, width, channels]
- ksize:池化窗口大小,[1, ksize, ksize, 1]
- strides:步长大小,[1,strides,strides,1]
- padding:“SAME”, “VALID”,使用的填充算法的类型
Mnist数据集卷积网络实现
import tensorflow as tf
from tensorflow.examples.tutorials.mnist import input_data
def weight_variables(shape):
"""权重初始化函数"""
w = tf.Variable(tf.random_normal(shape=shape, mean=0.0, stddev=1.0))
return w
def bias_variables(shape):
"""偏置初始化函数"""
b = tf.Variable(tf.constant(0.0, shape=shape))
return b
def model():
"""自定义的卷积模型"""
# 建立数据的占位符
with tf.variable_scope("data"):
x = tf.placeholder(tf.float32, [None, 28 * 28])
y_true = tf.placeholder(tf.float32, [None, 10])
# 第一层卷积 5*5*1,32个 strides=1
with tf.variable_scope("conv1"):
w_conv1 = weight_variables([5, 5, 1, 32])
b_conv1 = bias_variables([32])
x_reshape = tf.reshape(x, [-1, 28, 28, 1])
x_relu1 = tf.nn.relu(tf.nn.conv2d(x_reshape, w_conv1, strides=[1, 1, 1, 1], padding="SAME") + b_conv1)
# 池化
x_pool1 = tf.nn.max_pool(x_relu1, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding="SAME")
# 第二层卷积层,5*5*32,64个filter,strides=1
with tf.variable_scope("conv2"):
w_conv2 = weight_variables([5, 5, 32, 64])
b_conv2 = bias_variables([64])
x_relu2 = tf.nn.relu(tf.nn.conv2d(x_pool1, w_conv2, strides=[1, 1, 1, 1], padding="SAME") + b_conv2)
# 池化
x_pool2 = tf.nn.max_pool(x_relu2, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding="SAME")
# 全连接
with tf.variable_scope("fc"):
w_fc = weight_variables([7 * 7 * 64, 10])
b_fc = weight_variables([10])
x_fc_reshape = tf.reshape(x_pool2, [-1, 7 * 7 * 64])
y_predict = tf.matmul(x_fc_reshape, w_fc) + b_fc
return x, y_true, y_predict
def conv_fc():
# 准备数据
mnist = input_data.read_data_sets("./data/mnist/", one_hot=True)
x, y_true, y_predict = model()
# 所有样本损失值的平均值
with tf.variable_scope("soft_loss"):
loss = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(labels=y_true, logits=y_predict))
# 梯度下降
with tf.variable_scope("optimizer"):
train_op = tf.train.GradientDescentOptimizer(0.0001).minimize(loss)
# 计算准确率
with tf.variable_scope("acc"):
equal_list = tf.equal(tf.argmax(y_true, 1), tf.argmax(y_predict, 1))
accuracy = tf.reduce_mean(tf.cast(equal_list, tf.float32))
init_op = tf.global_variables_initializer()
with tf.Session() as sess:
sess.run(init_op)
for i in range(4000):
mnist_x, mnist_y = mnist.train.next_batch(50)
sess.run(train_op, feed_dict={x: mnist_x, y_true: mnist_y})
print("训练第%d步, 准确率为%f" % (i, sess.run(accuracy, feed_dict={x: mnist_x, y_true: mnist_y})))
if __name__ == '__main__':
conv_fc()
经过3000次训练后,准确率达到百分之八九十。。。
本文来自博客园,作者:coder-qi,转载请注明原文链接:https://www.cnblogs.com/coder-qi/p/10674216.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号