物理模拟
基本概念、质点弹簧系统、运动学、求解常微分方程、刚体与流体
质点弹簧系统
现在我们模拟一个弹簧系统。
首先弹簧:
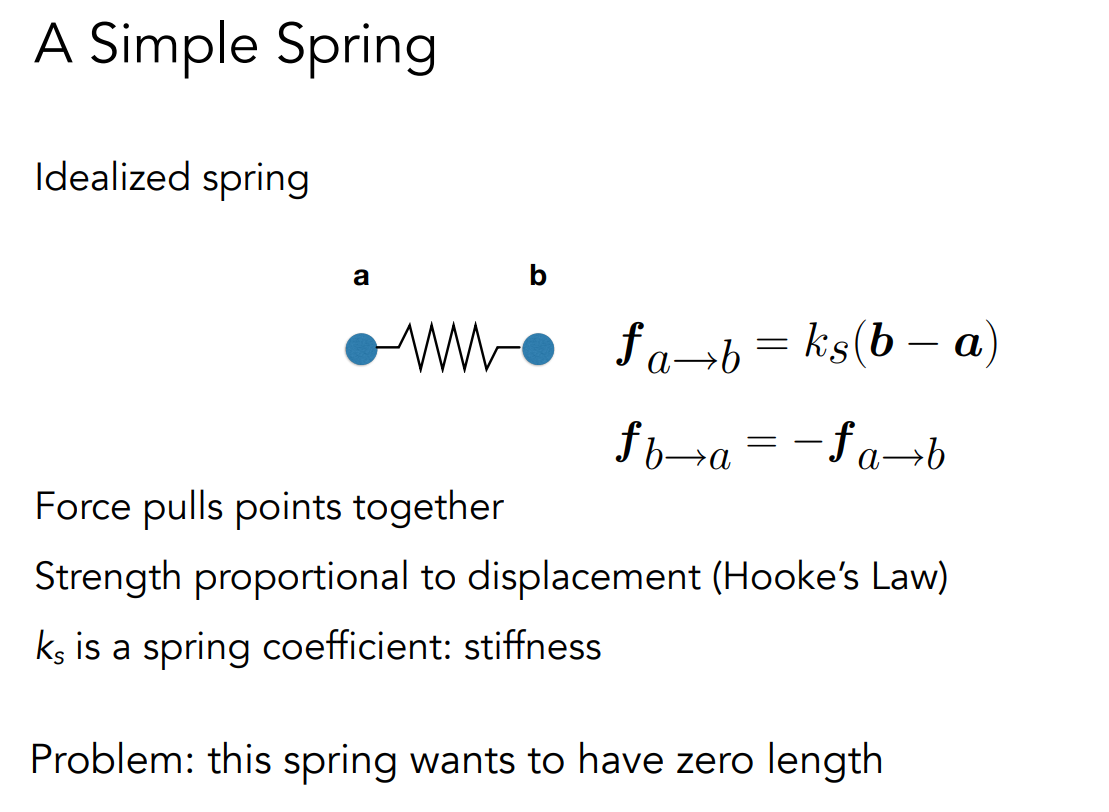
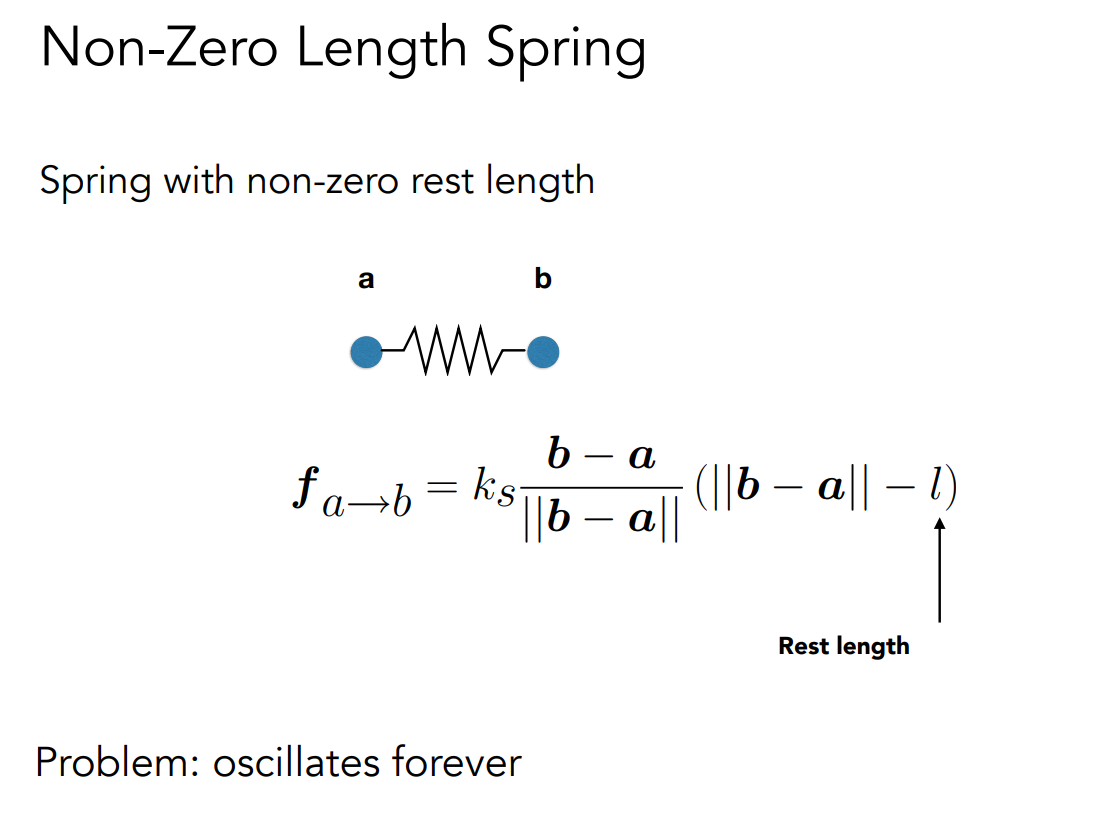
但是这样的话,没有能量损失,弹簧就会一直运动下去。所以增添摩擦力。
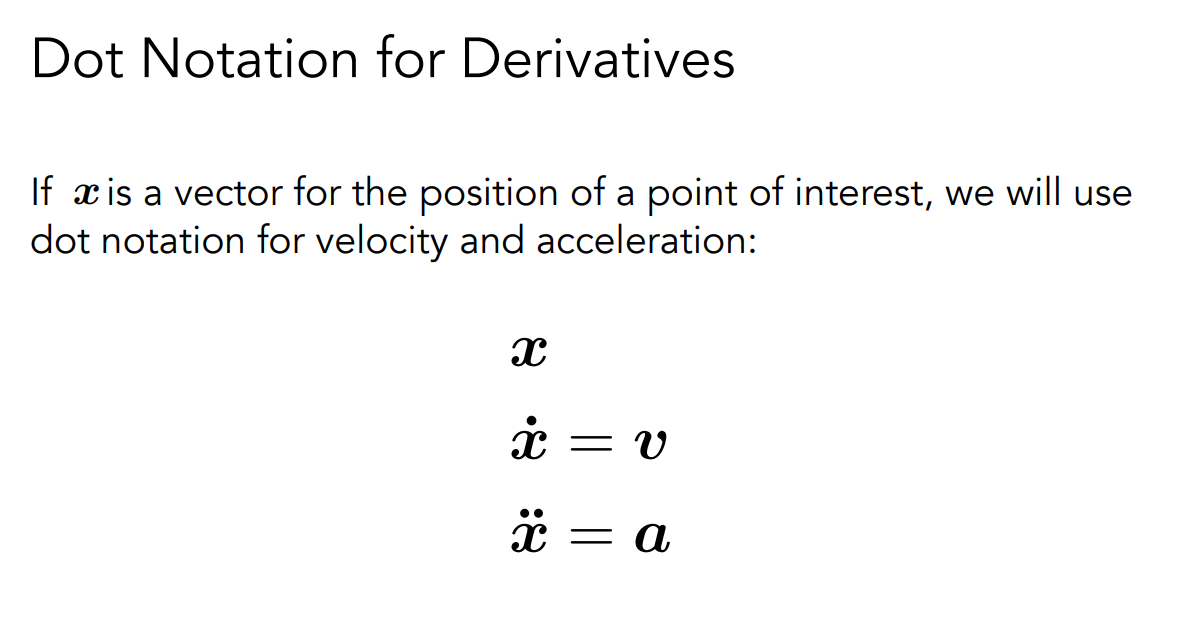
符号定义:
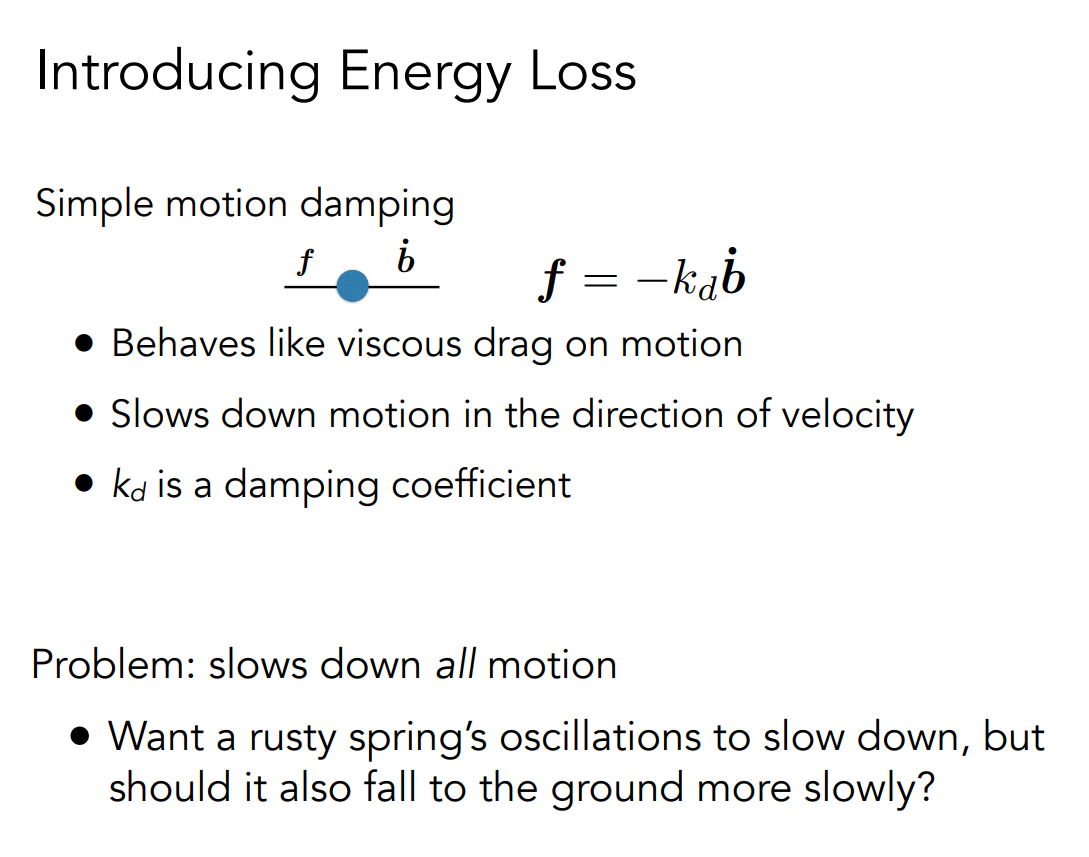
这样的问题是,摩擦力和速度方向相关,比如b围绕a转?
所以,摩擦力发生在弹簧内部,也就是说:

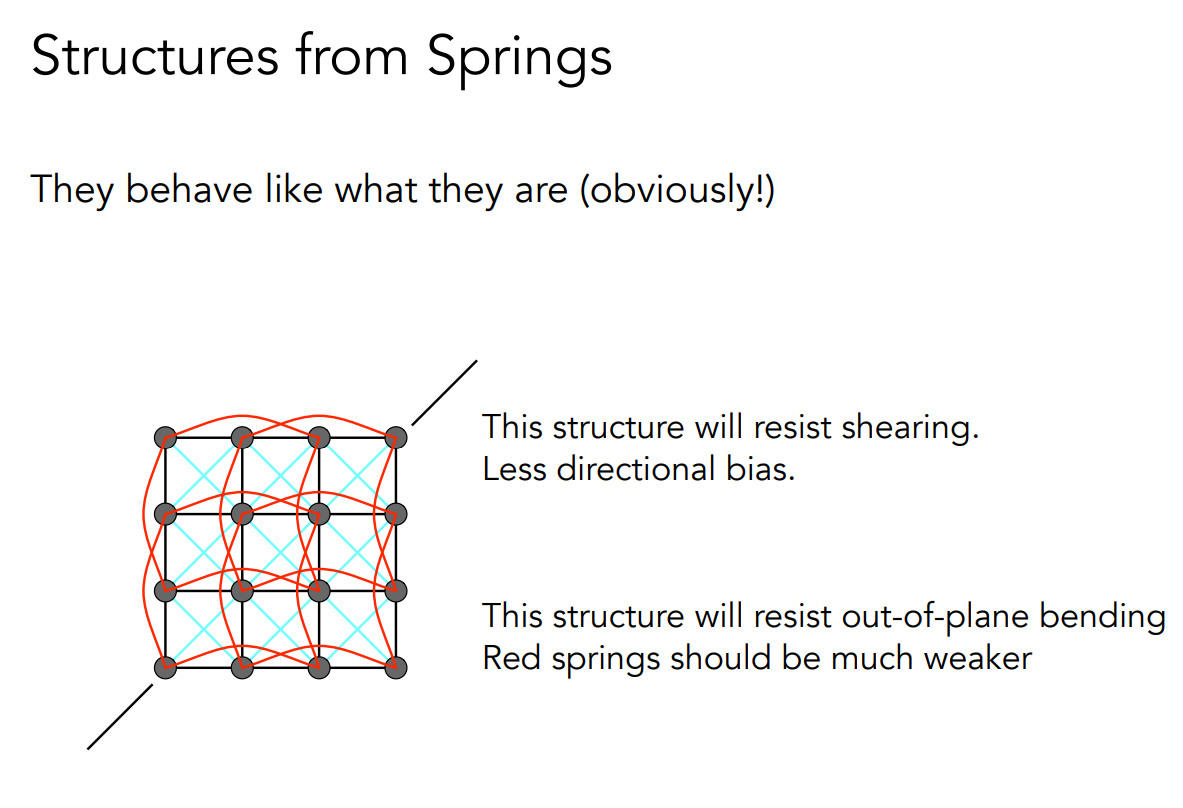
质点弹簧可以组合成多种结构。

想象模拟一个布料,来建立质点弹簧质点之间的关系。
对抗沿着角拉开的力,增加了蓝色线。对抗对折的力,增加了A-B,AB中间间隔一个的红色线。但是布料是可以被对折的,所以红色线很微弱。
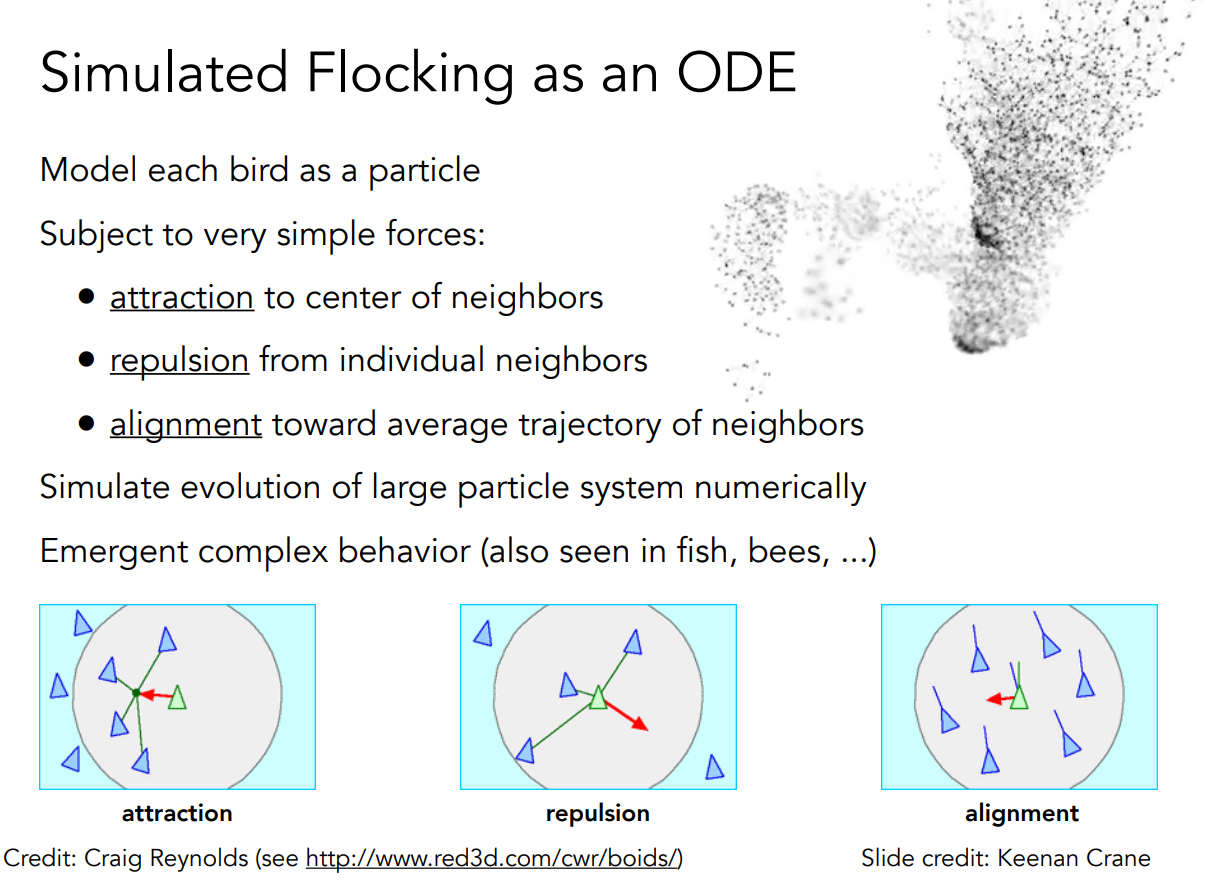
粒子系统
粒子系统包含大量粒子。每一个粒子的运动被一个集合的力所定义。
对一个新的帧来说:
- 创建粒子
- 计算每一个粒子上的力
- 更新每一个粒子的位置和速度
- 移除粒子
- 渲染粒子
常见粒子系统的力
速度场
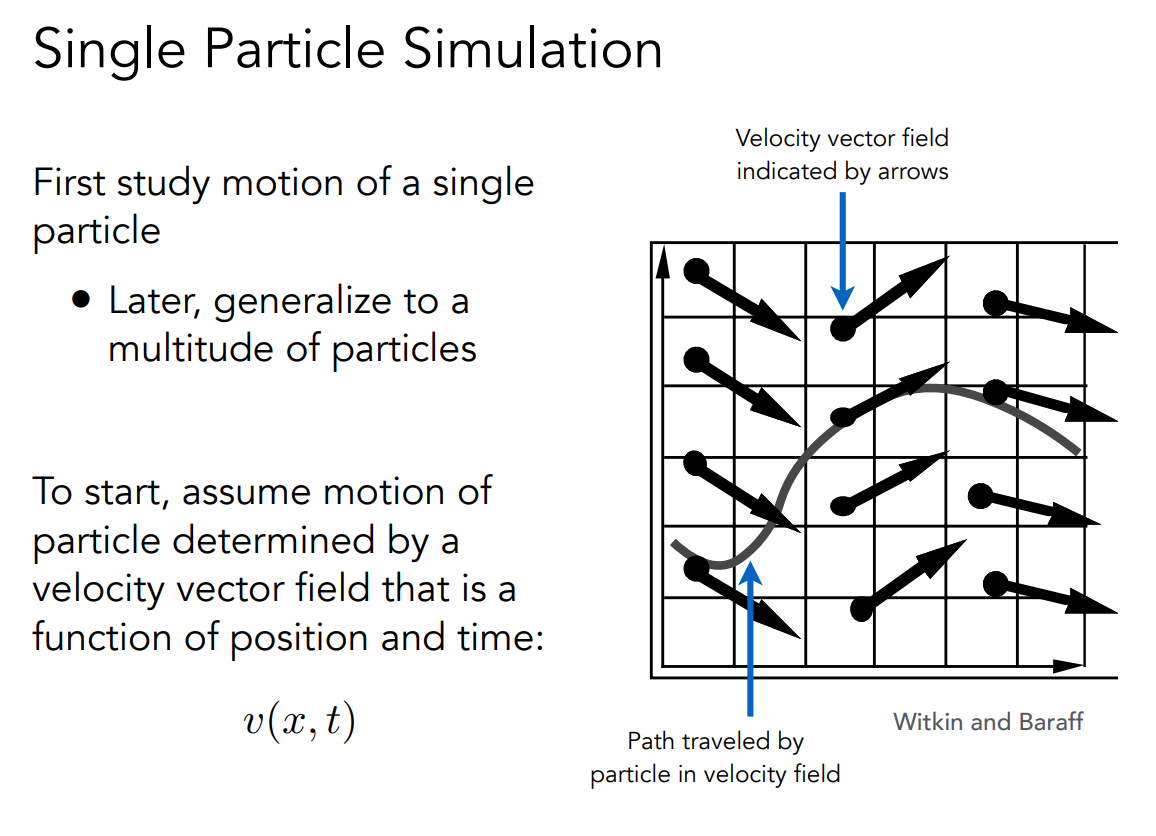
定义一个位置和时间,可以得到这个点下速度。
可以列出方程:
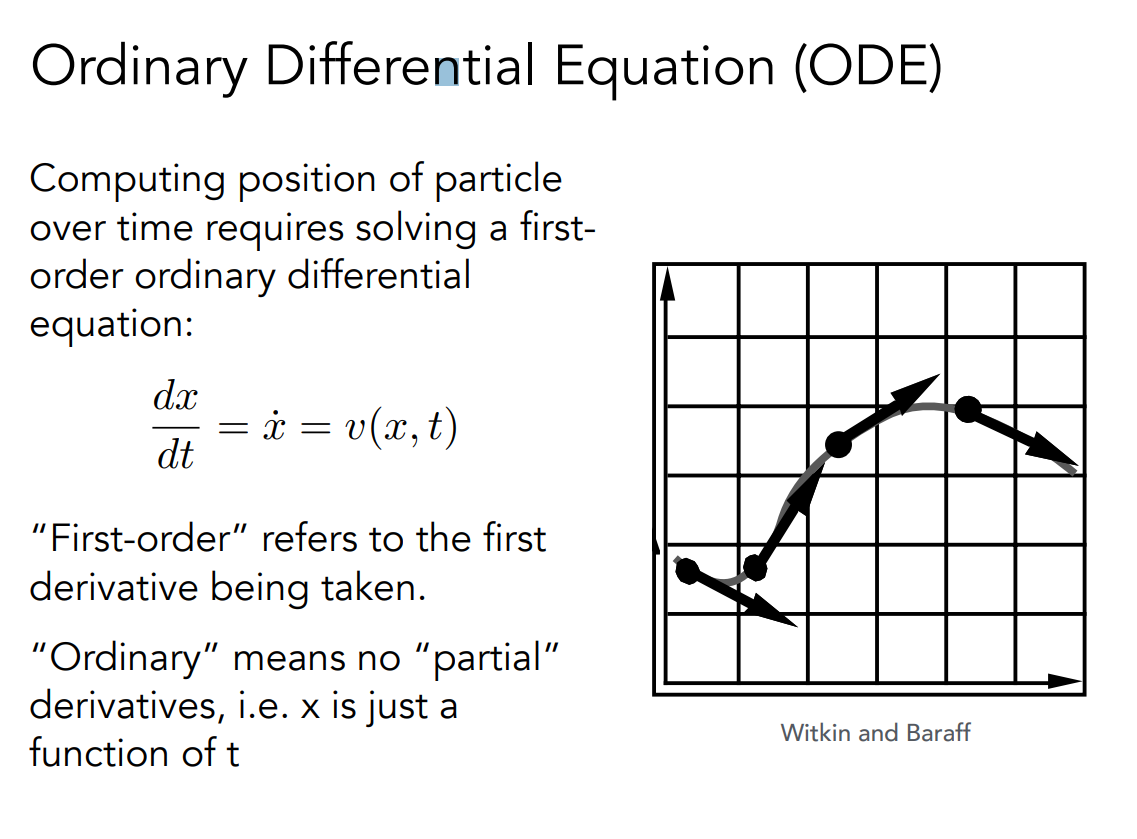

但是因为根据采样\(\delta t\)不同,得到的最终位置也不同。但是最终都会偏离,因为\(\delta t\)还是会有一个积累误差在里面。
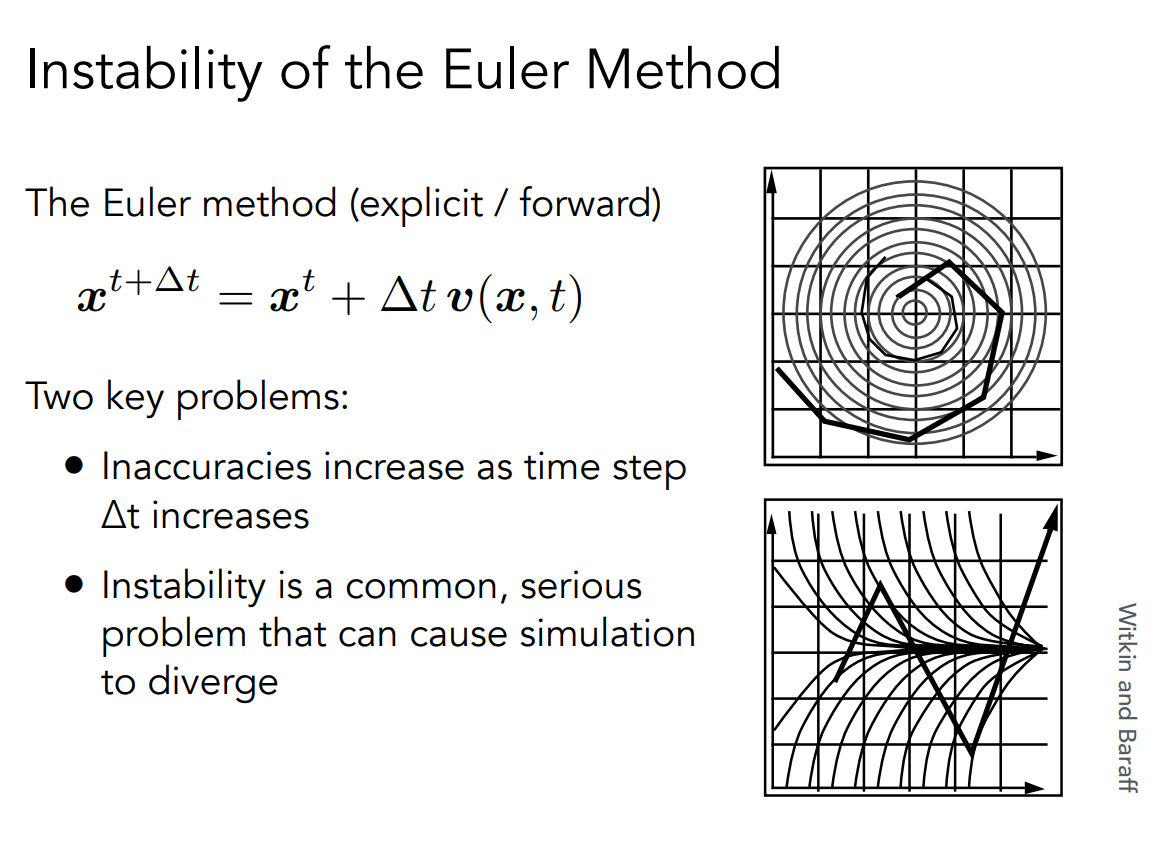
这里有一些方法减少不确定度:
- 中点法
- 自适应步长法
- 隐式方法(使用下一时刻的速度)
- 基于位置的方法(不考虑运动了,我只考虑位置)
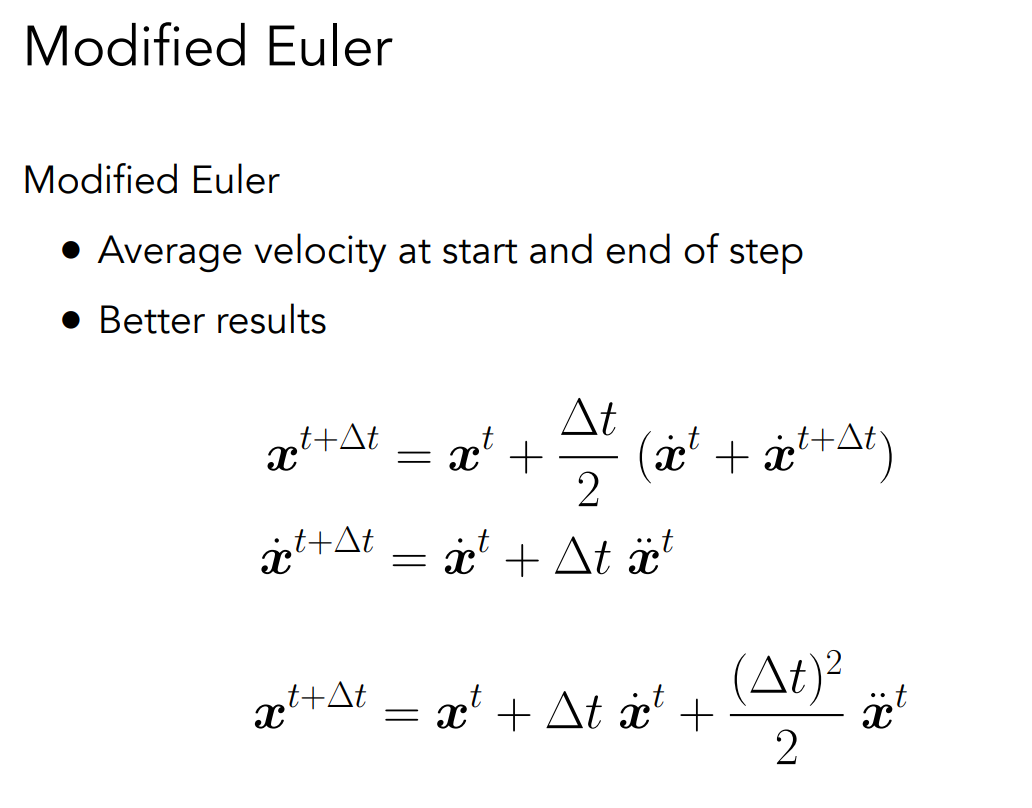
中点法

中点法误差小的原因,多展开了一项(感觉有点像泰勒展开):
自适应步长
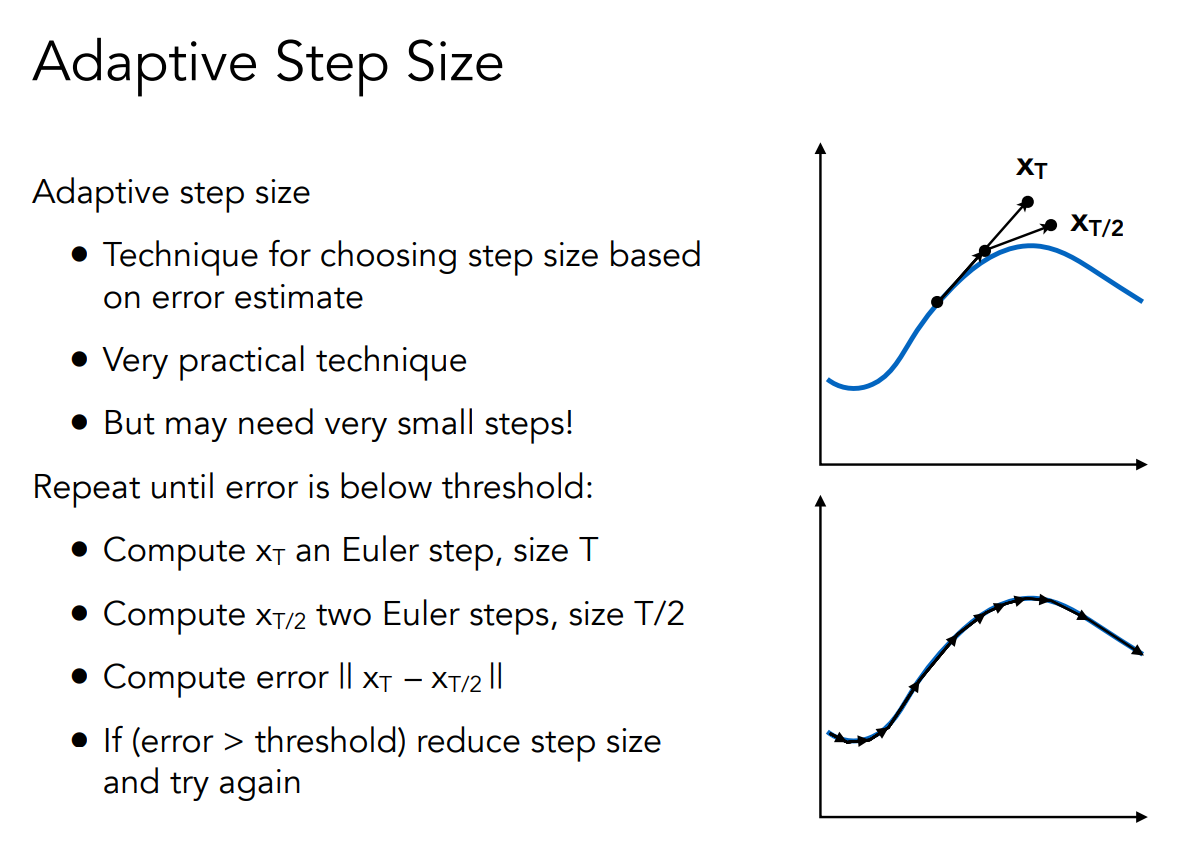
- 计算\(x_{T/2}\),直到\(X_T\)和\(X_{T/2}\)的差别大过阈值。【这里很奇怪,也可能到最后都大不过阈值,应该再设置一个出口】
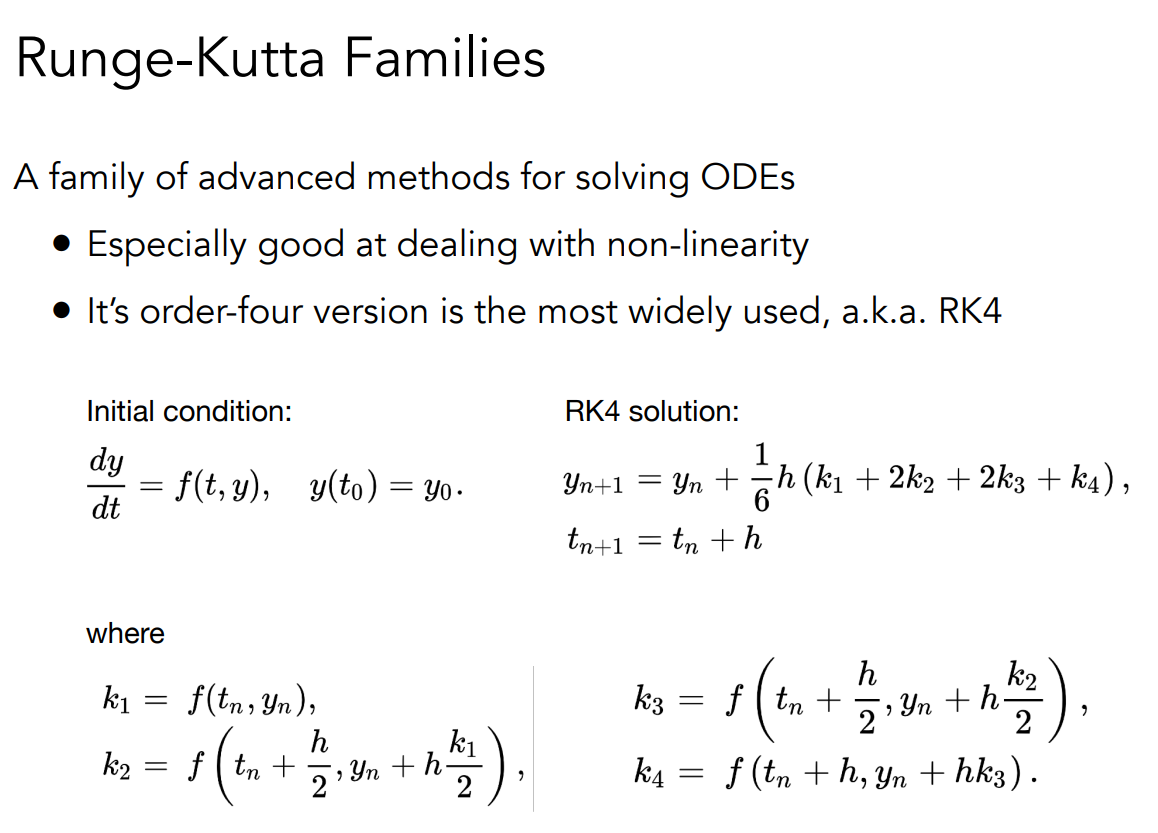
隐式
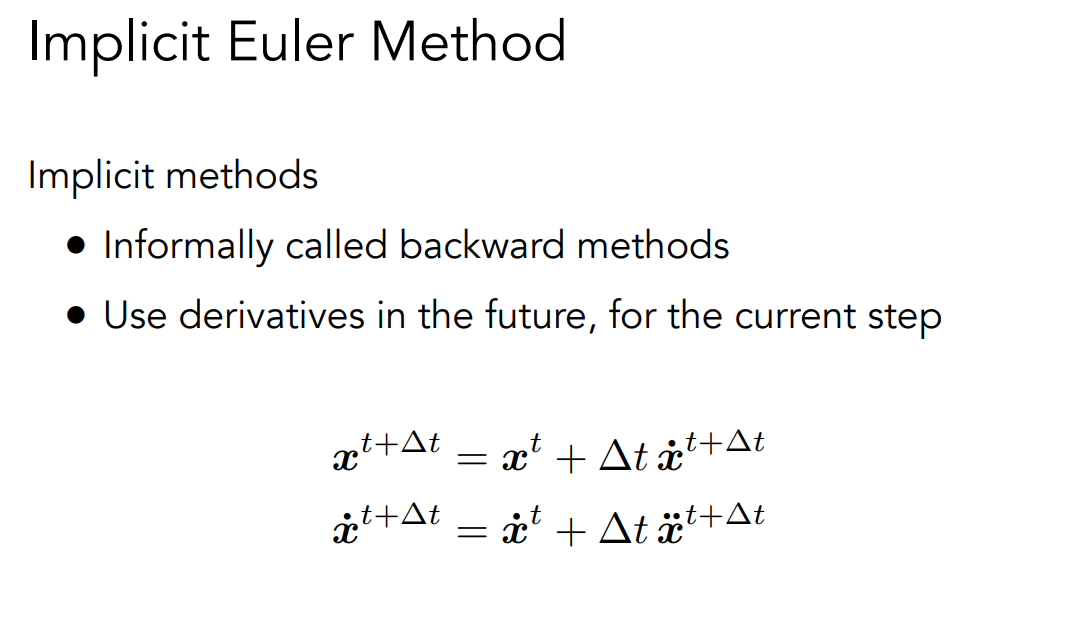
是一种叫RK的算法
Position-Based / Verlet Integration
不使用对速度的约束了,直接使用对位置的约束。很快很简单,但是可能不符合能量损失函数。
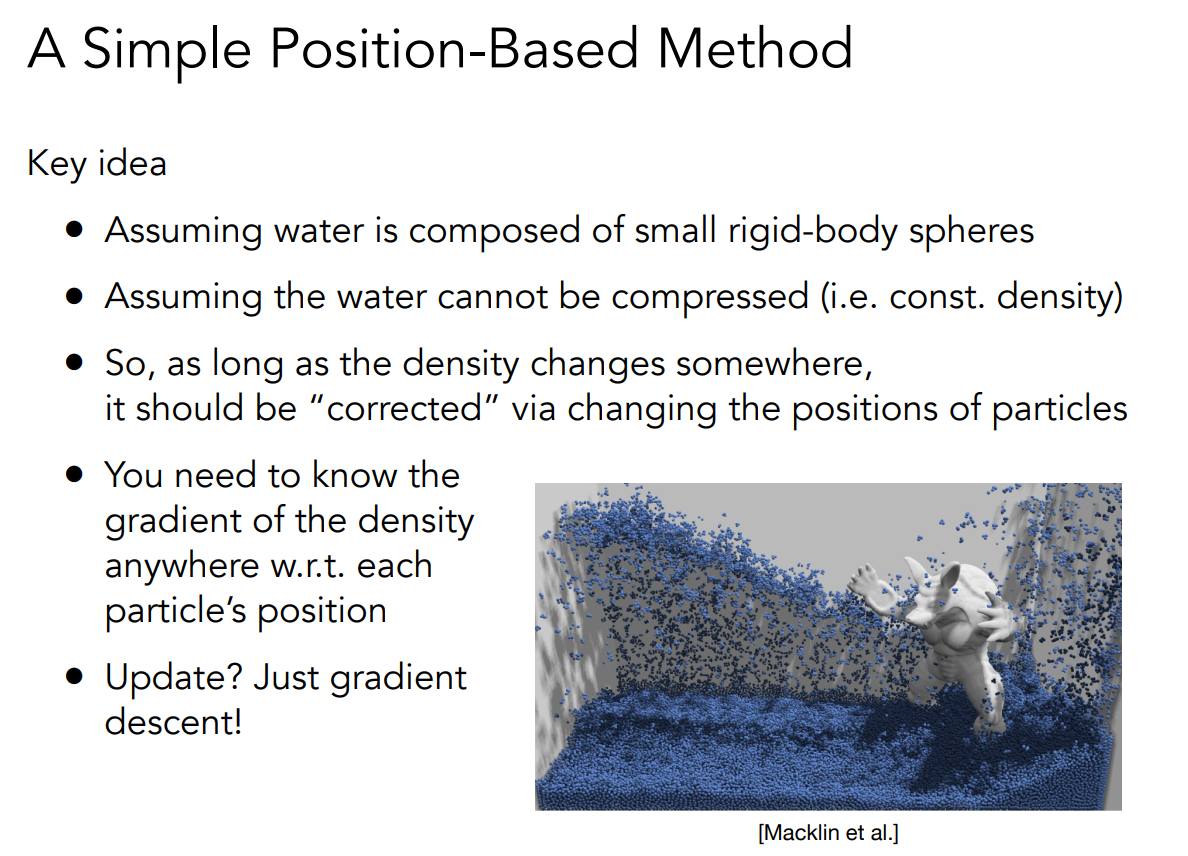
将水模拟为刚体小球的运动。定义与粒子位置相关的密度(density)误差,然后使用梯度下降法优化。
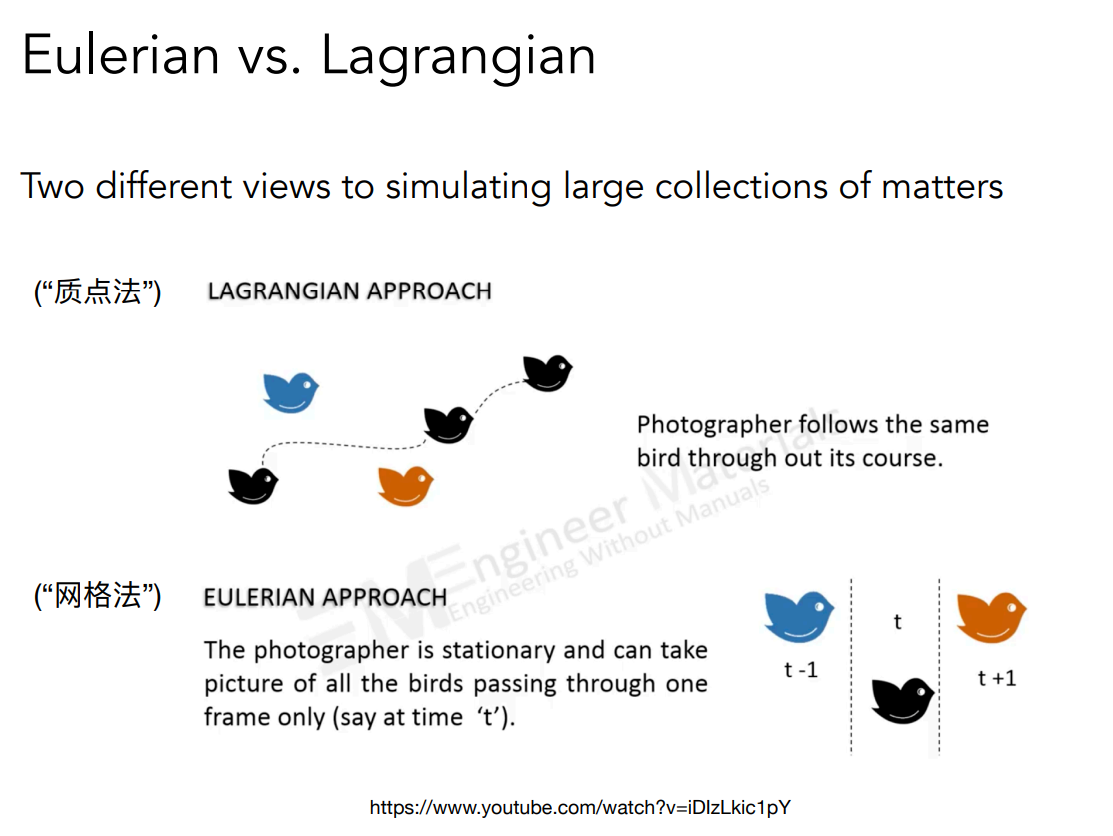
质点和网格法
质点法以每一个质点为关注点,网格法可以认为以固定的网格流水的质点。
运动学
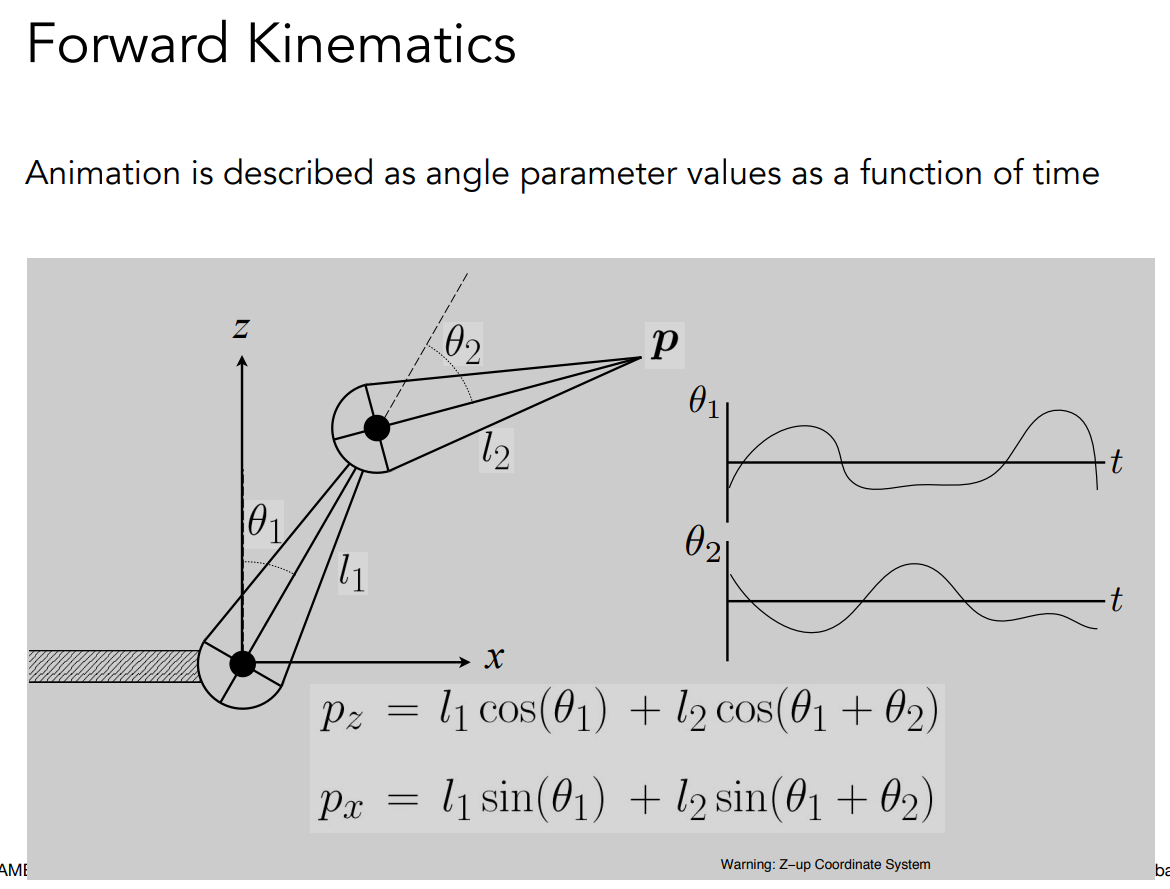
前向运动学
常见的运动学结构
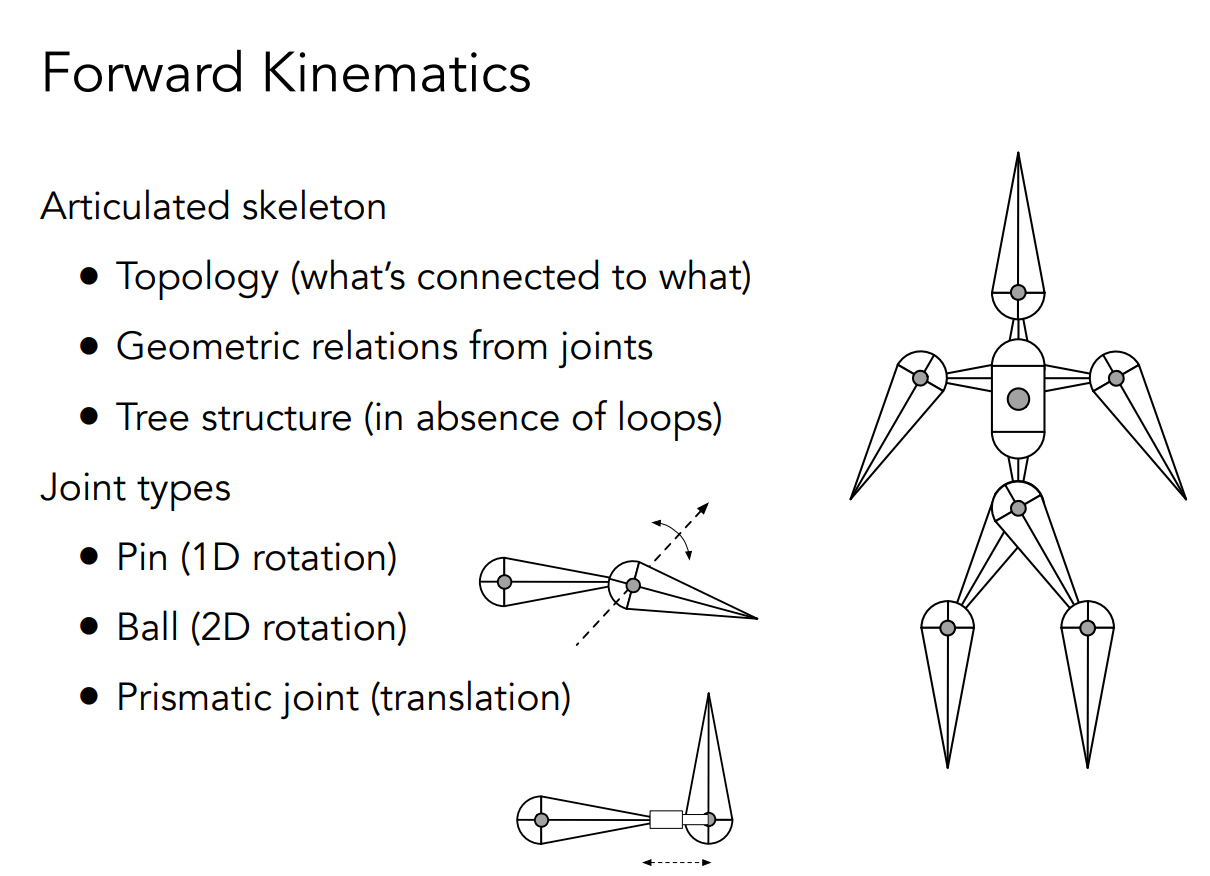
前向运动学指的是给定每一关节的运动角度然后就可以计算出位置。
逆向运动学
根据位置求解每个关节之间的运动角度。这样的话可能会有多解和不存在解的现象。
求解的过程是一个很适合用机器学习做优化的过程。选一个初始点、定义误差、计算优化方向、沿着优化方向做优化。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号