g2o函数
g2o简介
g2o(General Graphical Optimization),是一个在SLAM领域广为使用的优化库。基于图优化理论。
图优化理论
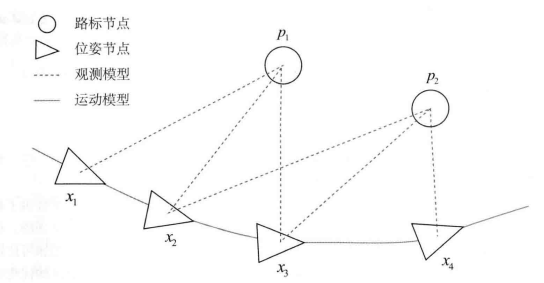
把优化问题表现成图的一种方式。一个图由若干个顶点和连接着这些顶点的边组成。
用顶点表示优化变量,用边表示误差项。对于一个非线性最小二乘问题,我们可以为其构建一个图。
主要步骤
- 定义顶点和边的类型
- 构建图
- 选择优化算法
- 调用g2o进行优化,返回结果
g2o函数介绍
Vertex是优化的变量
settoOriginImpl()用来初始化
oplusImpl()用来更新
在Edge的定义中,传入_vertices中。
Edge是误差项
computeError():定义误差项Error
linearizeOplus:求雅可比矩阵。_jacobianOplusXi是指第一个绑定的节点,_jacobianOplusXj为第二个。
使用g2o拟合曲线
#include<iostream>
#include<g2o/core/g2o_core_api.h>
#include<g2o/core/base_vertex.h>
#include<g2o/core/base_unary_edge.h>
#include<g2o/core/block_solver.h>
#include<g2o/core/optimization_algorithm_levenberg.h>
#include<g2o/core/optimization_algorithm_gauss_newton.h>
#include<g2o/core/optimization_algorithm_dogleg.h>
#include<g2o/solvers/dense/linear_solver_dense.h>
#include<Eigen/Core>
#include<opencv2/core/core.hpp>
#include<cmath>
#include<chrono>
using namespace std;
//曲线模型的顶点,模板参数:优化变量维度和数据类型
class CurveFittingVertex:public g2o::BaseVertex<3,Eigen::Vector3d>{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
//重置
virtual void setToOriginImpl()override{
_estimate<<0,0,0;
}
//更新
virtual void oplusImpl(const double *update)override{
_estimate+=Eigen::Vector3d(update);
}
//存盘和读盘:留空
virtual bool read(istream &in){}
virtual bool write(ostream &out)const{}
};
//误差模型 模板参数:观测值维度,类型,连接顶点类型
class CurveFittingEdge:public g2o::BaseUnaryEdge<1,double,CurveFittingVertex>{
public :
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
CurveFittingEdge(double x):BaseUnaryEdge(),_x(x){}
//计算曲线模型误差
virtual void computeError()override{
const CurveFittingVertex *v=static_cast<const CurveFittingVertex *>(_vertices[0]);
const Eigen::Vector3d abc=v->estimate();
_error(0,0)=_measurement-std::exp(abc(0,0)*_x*_x+abc(1,0)*_x+abc(2,0));
}
//计算雅可比矩阵
virtual void linearizeOplus()override{
const CurveFittingVertex *v=static_cast<const CurveFittingVertex *>(_vertices[0]);
const Eigen::Vector3d abc=v->estimate();
double y=exp(abc[0]*_x*_x+abc[1]*_x+abc[2]);
_jacobianOplusXi[0]=-_x*_x*y;
_jacobianOplusXi[1]=-_x*y;
_jacobianOplusXi[2]=-y;
}
virtual bool read(istream &in){}
virtual bool write(ostream &out)const{}
public:
double _x;//x值,y值为_measurement
};
int main(int argc,char **argv){
double ar=1.0,br=2.0,cr=1.0; //真实参数值
double ae=2.0,be=-1.0,ce=5.0; //估计参数值
int N=100;
double w_sigma=1.0; //噪声sigma
double inv_sigma=1.0/w_sigma;
cv::RNG rng; //OpenCV随机数生成
vector<double> x_data,y_data; //数据
for(int i=0;i<N;i++){
double x=i/100.0;
x_data.push_back(x);
y_data.push_back(exp(ar*x*x+br*x+cr)+rng.gaussian(w_sigma*w_sigma));
}
//构建图优化,先设定g2o
typedef g2o::BlockSolver<g2o::BlockSolverTraits<3,1>>BlockSolverType;//每个误差项优化变量维度为3,误差值维度为1
typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType>LinearSolverType;//线性求解器类型
//梯度下降方法,可以从GN、LM、DogLeg中选
auto solver=new g2o::OptimizationAlgorithmGaussNewton(g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>()));
g2o::SparseOptimizer optimizer; //图模型
optimizer.setAlgorithm(solver); //设置求解器
optimizer.setVerbose(true); //打开调试输出
//往图中增加顶点
CurveFittingVertex *v=new CurveFittingVertex();
v->setEstimate(Eigen::Vector3d(ae,be,ce));
v->setId(0);
optimizer.addVertex(v);
//往图中增加边
for(int i=0;i<N;i++){
CurveFittingEdge *edge=new CurveFittingEdge(x_data[i]);
edge->setId(i);
edge->setVertex(0,v); //设置连接的顶点
edge->setMeasurement(y_data[i]); //观测数值
edge->setInformation(Eigen::Matrix<double,1,1>::Identity()*1/(w_sigma*w_sigma));//信息矩阵:协方差矩阵之逆
optimizer.addEdge(edge);
}
//执行优化
cout<<"start optimization"<<endl;
chrono::steady_clock::time_point t1=chrono::steady_clock::now();
optimizer.initializeOptimization();
optimizer.optimize(10);//这个参数推测是迭代次数
chrono::steady_clock::time_point t2=chrono::steady_clock::now();
chrono::duration<double>time_used=chrono::duration_cast<chrono::duration<double>>(t2-t1);
cout<<"solve time cost = "<<time_used.count()<<" seconds."<<endl;
//输出优化值
Eigen::Vector3d abc_estimate=v->estimate();
cout<<"estimate model: "<<abc_estimate.transpose()<<endl;
return 0;
}
CMakeLists.txt
注意G2O_CORE_LIBRARY的写法,否则可能会出现XXX未定义的引用
cmake_minimum_required(VERSION 2.8)
project(ch6_3)
set(CMAKE_BUILD_TYPE Release)
set(CMAKE_CXX_FLAGS "-std=c++14 -O3")
list(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake)
list(APPEND CMAKE_MODULE_PATH /home/xxx/MyLibs/g2o-master/cmake_modules)
set(G2O_ROOT/usr/local/include/g2o)
set(G2O_LIBS/usr/local/include/g2o)
include_directories("/usr/include/eigen3")
#OpenCV
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
# g2o
find_package(G2O REQUIRED)
include_directories(${G2O_INCLUDE_DIRS})
add_executable(g2oCurveFitting g2oCurveFitting.cpp)
target_link_libraries(g2oCurveFitting ${G2O_STUFF_LIBRARY} ${G2O_CORE_LIBRARY} ${OpenCV_LIBS})

 浙公网安备 33010602011771号
浙公网安备 33010602011771号