
电机是重要的执行机构,可以将电转转化为机械能,从而驱动北控设备的转动或者移动,在我们的生活中应用非常广泛。例如,应用在电动工具、电动平衡车、电动园林工具、儿童玩具中。直流电机的实物图如下图所示。

1-直流电机实物图
对于普通的直流电机,在其两个电极上接上合适的直流电源后,电机就可以满速转动,电源反接后,电机就反向转动。但是在实际应用中,我们需要电机工作在不同的转速下,该如何操作呢?
1 直流电机的调速原理
我们可以做这样的实验,以24V直流电机为例,在电机两端接上24V的直流电源,电机会以满速转动,如果将24V电压降至2/3即16V,那么电机就会以满速的2/3转速运转。由此可知,想要调节电机的转速,只需要控制电机两端的电压即可。
以三极管作为驱动器件驱动小功率的电机,其电路原理图如下图所示。电机作为负载接在三极管的集电极上,基极由单片机控制。
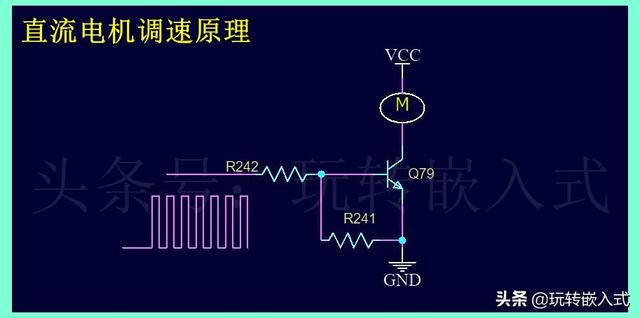
2-直流电机调速原理图
当单片机输出高电平时,三极管导通,使得电机得电,从而满速运行;当单片机输出低电平时,三极管截止,电机两端没有电压,电机停止转动。那如何使电机两端的电压发生变化,进而控制电机的转速呢?
只要单片机输出占空比可调的方波,即PWM信号即可控制电机两端的电压发生变化,从而实现电机转速的控制。
2 PWM信号调速的原理
所谓PWM,就是脉冲宽度调制技术,其具有两个很重要的参数:频率和占空比。频率,就是周期的倒数;占空比,就是高电平在一个周期内所占的比例。PWM方波的示意图如下图所示。

3-PWM的基本参数
在上图中,频率F的值为1/(T1+T2),占空比D的值为T1/(T1+T2)。通过改变单位时间内脉冲的个数可以实现调频;通过改变占空比可以实现调压。占空比越大,所得到的平均电压也就越大,幅值也就越大;占空比越小,所得到的平均电压也就越小,幅值也就越小。动图演示如图4所示。
4-PWM调压演示
通过以上原理就可以知道,只要改变PWM信号的占空比,就可以改变直流电机两端的平均电压,从而实现直流电机的调速。
前文说过,改变电机两端的电源极性可以改变电机的转速,那么电路如何实现电机的正反转调速呢?这需要通过H桥电路来实现。H桥的电路原理如下图所示。
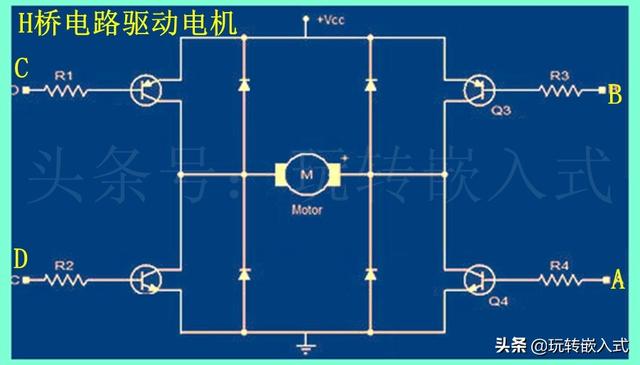
5-H桥驱动电机电路
H桥电路由四个功率电子开关构成,可以是晶体管也可以是MOS管。电子开关两两构成桥臂,在同一时刻只要对角的两个电子开关导通,另外两个截止,且每个桥臂的上下管不能同时导通。通过这个电路就可以实现电机的正反转调速。
3 PWM如何实现电机的正转调速
要实现电机的正转只需要做如下设置即可:
A控制端:高电平,控制三极管Q4导通;
B控制端:高电平,控制三极管Q3截止;
C控制端:低电平,控制三极管Q1导通;
D控制端:低电平,控制三极管Q2截止;
通过以上操作,即实现三极管Q2和Q3截止,三极管Q1和Q4导通,电流的流向如下:
VCC→Q1→电机→Q4→GND,实现了电机的正转。
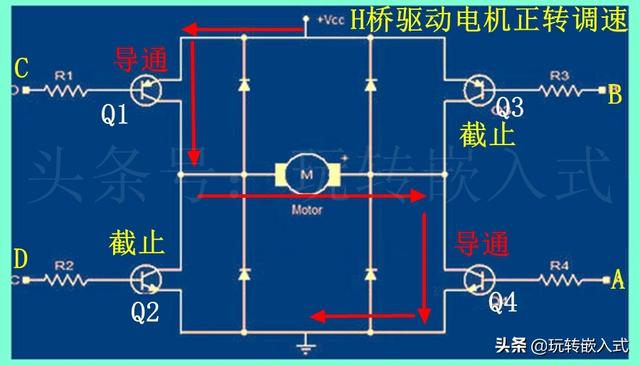
6-H桥驱动电机正转调速电路
在这种情况下要实现电机转速的调节,只需要给Q4的基极加载PWM信号即可。
4 PWM如何实现电机的反转调速
要实现电机的反转只需要做如下设置即可:
A控制端:低电平,控制三极管Q4截止;
B控制端:低电平,控制三极管Q3导通;
C控制端:高电平,控制三极管Q1截止;
D控制端:高电平,控制三极管Q2导通;
通过以上操作,即实现三极管Q1和Q4截止,三极管Q2和Q3导通,电流的流向如下:
VCC→Q3→电机→Q2→GND,实现了电机的反转。
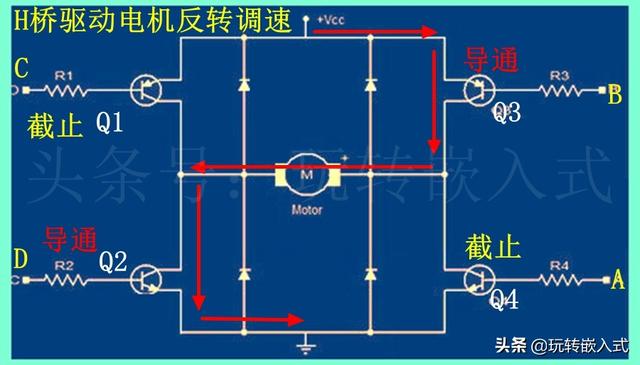
7-H桥驱动电机反转调速电路
在这种情况下要实现电机转速的调节,只需要给Q2的基极加载PWM信号即可。
5 电机专用驱动IC和分离元器件电路的对比
目前有很多电机专用驱动IC,体积小、控制简单,比用分离元器件所搭建的电路占有更大的优势。
专用IC优势之一:死区控制更容易
使用分离元器件时,必须要严格控制死区时间,也就是绝对不能让每个桥臂上的电子开关同时导通,这样容易导致电源短路,电流过大把两个电子开关烧坏。而专用的驱动IC都有死区控制,比分离元器件电路更安全。

8-电机专用驱动IC
专用IC优势之二:器件体积更小
分离元器件所搭建的驱动电路,所使用的元器件数目较多,体积较大。而专用驱动IC只需要一颗芯片即可,大大减小了体积、节省了PCB空间,使电路调试更容易。
本文转自小平头电子技术社区:https://www.xiaopingtou.cn/article-104206.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号