
webots自学笔记(八)麦克纳母轮移动机器人平台,可控制摄像头视角
原创文章,来自“博客园,_阿龙clliu” http://www.cnblogs.com/clliu/,转载请注明原文章出处。
觉得基础的东西说的差不多了,之后就分享一些好玩的仿真例子了。如果有软件的问题可以私聊我,我也是很愿意交个朋友啥的,但是我能力也有限。
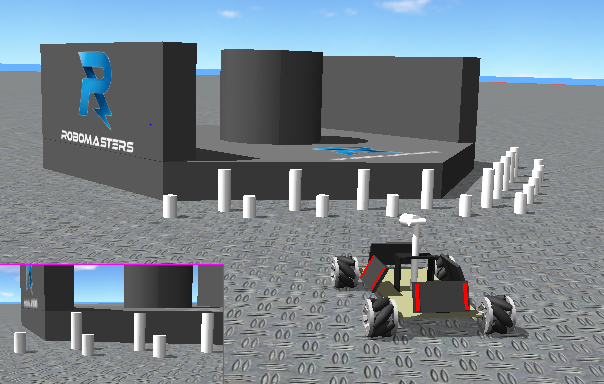
这次做了一个麦克纳母轮的移动平台,robomaster比赛里面常用到的种小车,由于本科学校有点渣,比赛玩不起,就玩玩仿真咯。轮子是从KUKA机器人的一个仿真例子中拆下来的,建一个麦轮还是需要很大工作量的,所以直接抄了例子里的,不过建模的源码和物理引擎都是可以看到的,还是有学习的价值的。
废话不多说,效果如下:

在后面给出仿真源文件,所以不说什么细节了。
按键操作:
O:切换红队
P:切换蓝队
Pgup:右旋转
Pgdn:左旋转
End:刹车
方向键:上下左右移动
WSAD:摄像头上下左右移动
仿真文件下载地址 文件解压密码: clliu
就当一个游戏玩也可以,祝玩的愉快。
-------------------------------------------------------------------------分隔线-------------------------------------------------------------------------
关注公众号--webots机器人,回复 “webots2019a”,获得百度云下载地址
哼哼[正经脸.jpg] 想获得更多webots仿真教程、教学直播或者webots仿真制定,关注微信公众号--“webots机器人”
--2019.05.29

 浙公网安备 33010602011771号
浙公网安备 33010602011771号