睡眠呼吸机-呼吸触发相关算法
内容整理自李洁-《基于μC_OS的呼吸机软件关键技术研究与系统设计》和《双水平呼吸机控制策略的设计与实现》,含有个人理解。
呼吸触发算法
呼吸触发包括吸气触发和呼气触发。无创呼吸机中压力触发和流量触发时主要的触发方式。
压力控制型呼吸机,用户呼吸动作对于气道内的压力变化影响较小,对气道内的流量变化影响较大。因此这里主要讨论流量触发方式。
常见的流量触发方式有
- 过零检测的流量触发
- 基于阈值的流量触发
- 基于流量图形的触发
基于过零检测的流量触发
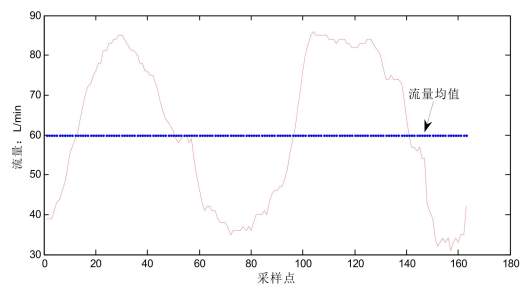
过零检测就是确定一个流量均值,判断当前流量与流量均值的关系。
当检测到流量信号低于流量均值,就判定为呼气阶段;当检测到流量信号高于流量均值,就判定为吸气阶段。
基于阈值的流量触发
流量阈值的触发方式,也叫做流量触发灵敏度。
其实这个方式,和过零检测差不多,只不过把单纯的一个判定值,改为阈值判断。
流量从低于呼气触发点到高于吸气触发点这个时间内,判定为呼气阶段。
流量从高于吸气触发点到低于呼气触发点这个时间内,判定为吸气阶段。
一般阈值设置为1-3L/min,也可以根据最大流量值乘以灵敏度系数得到。
患者开始吸气与呼吸机开始提供吸气压力之间的延迟时间取决于患者吸气努力的大小和阈值/灵敏度的取值大小,吸气力越大,灵敏度越小,延迟时间越短。

这两种方式的优点是实现简单,改变阈值大小即可使触发点提前或者延后,即调整灵敏度,缺点是容易受漏气和噪声干扰的影响,容易误触发。
基于流量图形的触发
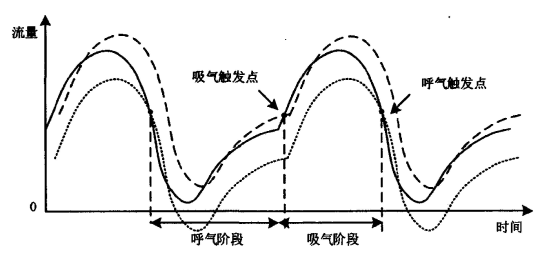
基于流量图形的触发方式示意图如图所示。将本周期的流量曲线延迟一定时间,然后分为两个曲线,一个向上平移,一个向下平移。在一个呼吸周期内,将向上平移的曲线与本周期流量曲线的第一个交点为吸气触发点,向下平移的曲线与本周期流量曲线的第一个交点为呼气触发点。
将流量低于呼气触发点到高于吸气触发点的时间内,判定为呼气阶段;将流量高于吸气触发点到低于呼气触发点的时间内,判定为吸气阶段。
个人理解:优点很明显,相比固定阈值设置,图形触发更灵活,触发点可以随呼吸过程改变而改变,能适应不同的人群。缺点也很明显,要求流量波形较为规则和平滑,触发灵敏度受波形形状的影响,做的不好可能可靠性较差。
我感觉这个是不太好理解的==,而且也是较复杂的。
误触发
在实际应用过程中,患者的咳嗽、吞咽、抽泣等行为可能会引起流量骤然下降或上升,最终导致了呼吸触发误判而引起肺伤,或者得到超限的气道和呼吸参数而错误报警。为了防止误判事件的发生,本文设计加入了呼吸触发误判识别功能。根据呼吸流量在短时间内骤然变化的特点,计算流量的变化率。
开始工作后,设置固定采样频率,因为时间间隔一定,所以比较差值即可。取N个流量差值作为样本,取其中的最大值 \(\Delta Q_{v_{max}}\)(L/min),即
具体判定方法为:当出现触发点后,计算当前的流量值和前面的流量值做差值比较,若流量变化率大于设定阈值,则判定为误触发,不做呼吸状态切换。也就是 \(\Delta Q_{v_{max}}\) 超过设定阈值,就判定为误触发,不做呼吸状态切换。
成人每3-5s完成一次呼吸过程。因此,为了能够监测一次完整的呼吸,得到足够的数据,N的取值与流量值的采样频率广有关,两者的关系如式所示:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号