BLDC开发笔记2.六步PWM输出
6步PWM互补输出
6步PWM输出是对 F103 的 TIM1 进行配置成PWM输出模式,带刹车和死区功能。按照模块化进行初始化配置。勾选keil中的C99标准(支持任意地方定义变量)。
GPIO初始化
打开相应功能模块时钟,将TIM1 的TIx引脚配置为复用推挽输出模式,BKIN(刹车)引脚配置为浮空输入模式。
通过在头文件进行宏定义配置,在硬件改变的时候方便修改
#define BLDC_TIMx TIM1
#define BLDC_TIM_APBxClock_FUN RCC_APB2PeriphClockCmd
#define BLDC_TIM_CLK RCC_APB2Periph_TIM1
#define BLDC_TIM_GPIO_APBxClock_FUN RCC_APB2PeriphClockCmd
#define BLDC_TIM_GPIO_CLK (RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB)
#define BLDC_TIM_CH1_PORT GPIOA
#define BLDC_TIM_CH1_PIN GPIO_Pin_8 //通道1
#define BLDC_TIM_CH2_PORT GPIOA
#define BLDC_TIM_CH2_PIN GPIO_Pin_9 //通道2
#define BLDC_TIM_CH3_PORT GPIOA
#define BLDC_TIM_CH3_PIN GPIO_Pin_10 //通道3
#define BLDC_TIM_CH1N_PORT GPIOB
#define BLDC_TIM_CH1N_PIN GPIO_Pin_13 //互补通道1
#define BLDC_TIM_CH2N_PORT GPIOB
#define BLDC_TIM_CH2N_PIN GPIO_Pin_14 //互补通道2
#define BLDC_TIM_CH3N_PORT GPIOB
#define BLDC_TIM_CH3N_PIN GPIO_Pin_15 //互补通道3
#define BLDC_TIM_BKIN_PORT GPIOB
#define BLDC_TIM_BKIN_PIN GPIO_Pin_12 //刹车输入
GPIO初始化函数
static void BLDC_TIMx_GPIO_Config(void)
{
//GPIO初始化结构体
GPIO_InitTypeDef GPIO_InitStruct;
//打开GPIOA和GPIOB的时钟和复用功能时钟
BLDC_TIM_GPIO_APBxClock_FUN(BLDC_TIM_GPIO_CLK|RCC_APB2Periph_AFIO, ENABLE);
//通道1引脚配置
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=BLDC_TIM_CH1_PIN;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(BLDC_TIM_CH1_PORT,&GPIO_InitStruct);
//通道2引脚配置
GPIO_InitStruct.GPIO_Pin=BLDC_TIM_CH2_PIN;
GPIO_Init(BLDC_TIM_CH2_PORT,&GPIO_InitStruct);
//通道3引脚配置
GPIO_InitStruct.GPIO_Pin=BLDC_TIM_CH3_PIN;
GPIO_Init(BLDC_TIM_CH3_PORT,&GPIO_InitStruct);
//互补通道1引脚配置
GPIO_InitStruct.GPIO_Pin=BLDC_TIM_CH1N_PIN;
GPIO_Init(BLDC_TIM_CH1N_PORT,&GPIO_InitStruct);
//互补通道2引脚配置
GPIO_InitStruct.GPIO_Pin=BLDC_TIM_CH2N_PIN;
GPIO_Init(BLDC_TIM_CH2N_PORT ,&GPIO_InitStruct);
//互补通道3引脚配置
GPIO_InitStruct.GPIO_Pin=BLDC_TIM_CH3N_PIN;;
GPIO_Init(BLDC_TIM_CH3N_PORT,&GPIO_InitStruct);
//BKIN pin 引脚配置
GPIO_InitStruct.GPIO_Pin=BLDC_TIM_BKIN_PIN;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_Init(BLDC_TIM_BKIN_PORT ,&GPIO_InitStruct);
}
时基初始化

时基配置
APB2时钟为72Mhz,预分频系数PSC为0,(PSC决定记一次的时间),方便计算
将PWM频率为 f=20khz,故定时器计数周期ARR=72M/(PSC+1)/ f,因为我们预分频系数为0,故 ARR=72M/(0+1)/20k=3600。
通过在h文件宏定义配置这些参数:
//PWM频率
#define BLDC_TIM_PWM_FREQ 20000
// 定时器预分频系数
#define BLDC_TIM_PRESCALER 0
//定时器计数周期
#define BLDC_TIM_PERIOD (uint16_t)(SystemCoreClock/(BLDC_TIM_PRESCALER+1)/BLDC_TIM_PWM_FREQ)
//定时器重复寄存器数值
#define BLDC_TIM_REPETITIONCOUNTER 0
时基初始化函数
这里需要说明的是 TIM_TimeBaseInitStruct.TIM_ClockDivision ,时钟分割系数,她实际上配置的是定时器控制寄存器1的 CKD [1:0]。
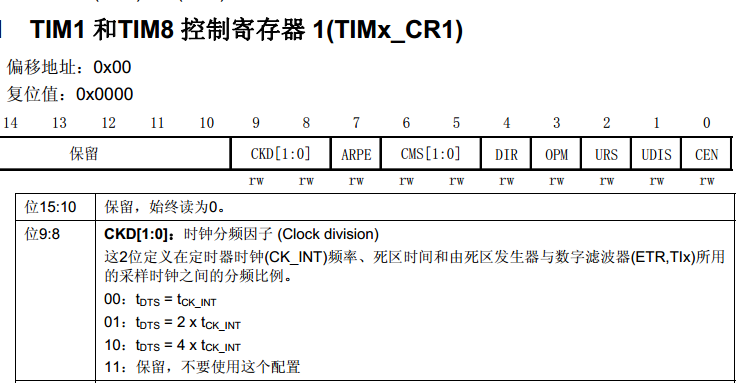
她的作用主要在两个方面:
- 死区时间配置,死区时间发生器需要一个死区时钟来计数,她通过内部时钟 CK_INT 分频得来,后面详细讲计算。这里我将CKD配置为00,即不分频,还是72Mhz。
- 当使用外部时钟模式(ETR/TIx)/输入捕获功能时(TIx),如果频率太高需要降频,或者滤波时,需要一个时钟对这些信号进行采样,采样时钟 \(F_{DTS}=CK_{INT}/CKD/N\),N是数字滤波器滤波长度
- 当CKD[1:0]=00,不对CK_INT分频,当CKD[1:0]=01,对CK_INT进行2分频,当CKD[1:0]=10,对CK_INT进行4分频。
static void BLDC_TIMx_TimeBaseInit(void)
{
//打开TIM1时钟
BLDC_TIM_APBxClock_FUN(BLDC_TIM_CLK,ENABLE);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct; //时基初始化结构体
/*时基初始化*/
TIM_TimeBaseInitStruct.TIM_ClockDivision=TIM_CKD_DIV1; //时钟分割为1
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up; //向上计数
TIM_TimeBaseInitStruct.TIM_Period=BLDC_TIM_PERIOD; //计数周期
TIM_TimeBaseInitStruct.TIM_Prescaler=BLDC_TIM_PRESCALER; //预分频
TIM_TimeBaseInitStruct.TIM_RepetitionCounter=BLDC_TIM_REPETITIONCOUNTER; //重复计数器值为0,不重复
TIM_TimeBaseInit(BLDC_TIMx,&TIM_TimeBaseInitStruct);
//定时器使能预装载功能
TIM_ARRPreloadConfig(BLDC_TIMx,ENABLE); //ARR预装载
}
输出比较模式初始化
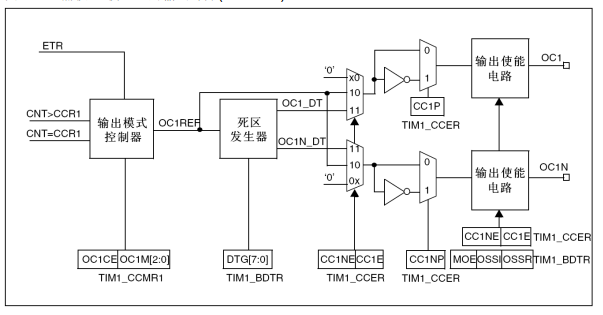
输出比较模块的功能框图:
-
将定时器配置为输出比较模式——PWM1模式。将定时器配置为向上计数模式,当计数器数值小于输出比较寄存器的值时,即TIMx_CNT<TIMx_CCR1,输出有效电平。有效电平的选择通过TIM_OCInitStruct.TIM_OCPolarity这个成员配置,我将其配置为高电平有效。

-
需要注意的是,TIM_OCInitStruct.TIM_OCIdleState和TIM_OCInitStruct.TIM_OCNIdleState这两个成员是配置引脚空闲状态的,就是关闭定时器时的输出电平,所以在刹车功能有效时(关闭定时器输出),我们不能将同一桥的两个输入都配置为高电平,否则就烧mos了。这里我将两个空闲状态都配置为低电平。
-
占空比=CCR/ARR
static void BLDC_TIMx_OCInit(void)
{
TIM_OCInitTypeDef TIM_OCInitStruct; //输出比较初始化结构体
//输出比较通道1模式配置
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1; //TIMx_CNT<TIMx_CCR1,输出有效电平
TIM_OCInitStruct.TIM_OCIdleState=TIM_OCIdleState_Reset; //关闭定时器时空闲状态为高电平
TIM_OCInitStruct.TIM_OCNIdleState=TIM_OCIdleState_Reset;
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High; //输出有效电平为高电平
TIM_OCInitStruct.TIM_OCNPolarity=TIM_OCNPolarity_High;
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable; //输出使能
TIM_OCInitStruct.TIM_OutputNState=TIM_OutputNState_Enable; //互补通道输出使能
TIM_OCInitStruct.TIM_Pulse=0; //设置占空比,即CCR值,这里不使用,后面用库函数配置
TIM_OC1Init(BLDC_TIMx ,&TIM_OCInitStruct);
//输出比较通道2模式配置
TIM_OCInitStruct.TIM_Pulse=0;
TIM_OC2Init(BLDC_TIMx, &TIM_OCInitStruct);
//输出比较通道3模式配置
TIM_OCInitStruct.TIM_Pulse=0;
TIM_OC3Init(BLDC_TIMx, &TIM_OCInitStruct);
//输出比较使能预装载功能
TIM_OC1PreloadConfig(BLDC_TIMx,TIM_OCPreload_Enable); //CCR1预装载
TIM_OC2PreloadConfig(BLDC_TIMx,TIM_OCPreload_Enable); //CCR2预装载
TIM_OC3PreloadConfig(BLDC_TIMx,TIM_OCPreload_Enable); //CCR3预装载
}
死区和刹车功能初始化
static void BLDC_TIMx_BDTRInit(void)
{
TIM_BDTRInitTypeDef TIM_BDTRInitStructure; //刹车与死区初始化结构体
//刹车功能初始化,配置断路时通道输出状态,以及死区时间
/* Automatic Output enable, Break, dead time and lock configuration*/
TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable;//运行模式下“关闭状态”选择
TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable;//空闲模式下“关闭状态”选择
TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_1; //锁定设置,防止软件出错,提供写保护
TIM_BDTRInitStructure.TIM_DeadTime = 10; //死区时间
TIM_BDTRInitStructure.TIM_Break = TIM_Break_Enable; //使能刹车功能
TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High; //刹车输入极性,高电平有效
TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Disable;
TIM_BDTRConfig(BLDC_TIMx, &TIM_BDTRInitStructure);
}
死区时间的计算
关于死区时间的计算,她是在刹车和死区寄存器(TIMx_BDTR)中的UTG[7:0]: 死区发生器设置 (Dead-time generator setup)中进行配置。
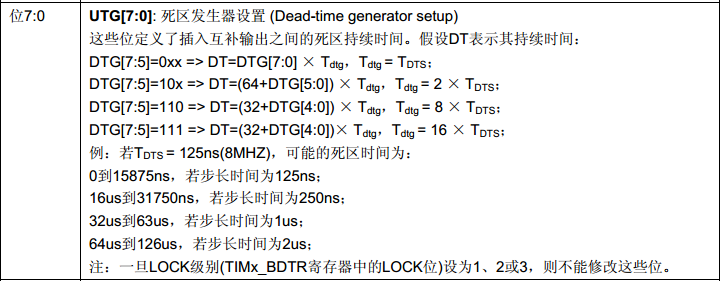
举例说明,假设将成员配置为TIM_BDTRInitStructure.TIM_DeadTime = 10;这个成员实际上配置的就是UTG[7:0]的值。
-
十进制10的二进制表示为00001010,可得DTG[7:5]=000,故死区持续时间DT=DTG[7:0]*Tdtg=10*Tdtg=10*Tdts
-
Tdts由控制寄存器CR1中的CKD决定,前面我们已经分析过,我们将CKD[1:0]=00(即不分频),故Tdts=1/72M
-
综上,我们可以算出,死区持续时间DT=10/72M≈138.9ns
PWM输出总初始化
static void BLDC_TIMx_PWM_Init(void)
{
//GPIO初始化
BLDC_TIMx_GPIO_Config();
//时基初始化
BLDC_TIMx_TimeBaseInit();
//输出比较模式初始化
BLDC_TIMx_OCInit();
//死区和刹车功能初始化
BLDC_TIMx_BDTRInit();
//定时器使能
TIM_Cmd(BLDC_TIMx, ENABLE);
//PWM输出使能,配置的是BDTR寄存器的MOE位,高级定时器独有。
TIM_CtrlPWMOutputs(BLDC_TIMx, ENABLE);
//关闭定时器输出比较
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_1,TIM_CCx_Disable);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_1,TIM_CCxN_Disable);
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_2,TIM_CCx_Disable);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_2,TIM_CCxN_Disable);
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_3,TIM_CCx_Disable);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_3,TIM_CCxN_Disable);
}
这样就初始化完毕了。
换相函数
换相函数是要根据霍尔换相时序表编写,按照顺序对给定MOS管PWM信号,这里采用的是H-PWM-L-ON驱动方式,所以上桥CCR按照占空比给定,下桥CCR给定ARR值,让她一直高电平
在头文件中宏定义占空比
//PWM占空比
#define speed_duty 15 //占空比为15/100,注意这里没有除以100,只是定义数值
函数TIM_SetCompareX(TIM_TypeDef* TIMx, uint16_t CompareX),配置的就是CCR的值,我们知道占空比=CCR/ARR,所以CCR=ARR*(speed_duty/100)
void BLDC_PHASE_CHANGE(uint8_t uwstep)
{
switch(uwstep)
{
case 6: //B+ C-
//输出比较通道1配置
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_1,TIM_CCx_Disable);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_1,TIM_CCxN_Disable);
//输出比较通道2配置
TIM_SetCompare2(BLDC_TIMx,BLDC_TIM_PERIOD*speed_duty/100);
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_2,TIM_CCx_Enable);
//输出比较通道3配置
TIM_SetCompare3(BLDC_TIMx,BLDC_TIM_PERIOD);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_3,TIM_CCxN_Enable);
break;
case 2: //B+ A-
//输出比较通道3配置
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_3,TIM_CCx_Disable);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_3,TIM_CCxN_Disable);
//输出比较通道1配置
TIM_SetCompare1(BLDC_TIMx,BLDC_TIM_PERIOD);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_1,TIM_CCxN_Enable);
//输出比较通道2配置
TIM_SetCompare2(BLDC_TIMx,BLDC_TIM_PERIOD*speed_duty/100);
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_2,TIM_CCx_Enable);
break;
case 3: //C+ A-
//输出比较通道2配置
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_2,TIM_CCx_Disable);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_2,TIM_CCxN_Disable);
//输出比较通道1配置
TIM_SetCompare1(BLDC_TIMx,BLDC_TIM_PERIOD);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_1,TIM_CCxN_Enable);
//输出比较通道3配置
TIM_SetCompare3(BLDC_TIMx,BLDC_TIM_PERIOD*speed_duty/100);
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_3,TIM_CCx_Enable);
break;
case 1: //C+ B-
//输出比较通道1配置
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_1,TIM_CCx_Disable);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_1,TIM_CCxN_Disable);
//输出比较通道2配置
TIM_SetCompare2(BLDC_TIMx,BLDC_TIM_PERIOD);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_2,TIM_CCxN_Enable);
//输出比较通道3配置
TIM_SetCompare3(BLDC_TIMx,BLDC_TIM_PERIOD*speed_duty/100);
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_3,TIM_CCx_Enable);
break;
case 5: //A+ B-
//输出比较通道3配置
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_3,TIM_CCx_Disable);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_3,TIM_CCxN_Disable);
//输出比较通道1配置
TIM_SetCompare1(BLDC_TIMx,BLDC_TIM_PERIOD*speed_duty/100);
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_1,TIM_CCx_Enable);
//输出比较通道2配置
TIM_SetCompare2(BLDC_TIMx,BLDC_TIM_PERIOD);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_2,TIM_CCxN_Enable);
break;
case 4: //A+ C-
//输出比较通道2配置
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_2,TIM_CCx_Disable);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_2,TIM_CCxN_Disable);
//输出比较通道1配置
TIM_SetCompare1(BLDC_TIMx,BLDC_TIM_PERIOD*speed_duty/100);
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_1,TIM_CCx_Enable);
//输出比较通道3配置
TIM_SetCompare3(BLDC_TIMx,BLDC_TIM_PERIOD);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_3,TIM_CCxN_Enable);
break;
default: //关闭输出
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_1,TIM_CCx_Disable);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_1,TIM_CCxN_Disable);
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_2,TIM_CCx_Disable);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_2,TIM_CCxN_Disable);
TIM_CCxCmd(BLDC_TIMx,TIM_Channel_3,TIM_CCx_Disable);
TIM_CCxNCmd(BLDC_TIMx,TIM_Channel_3,TIM_CCxN_Disable);
break;
}
}
波形测试
通过逻辑分析仪看MCU输出的六路PWM信号,判断输出逻辑正不正确。我用的是Saleae logic 16.
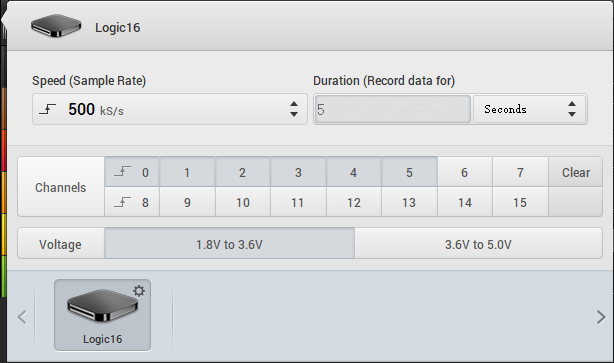

在下桥高电平期间,上桥是占空比为20%的矩形波。
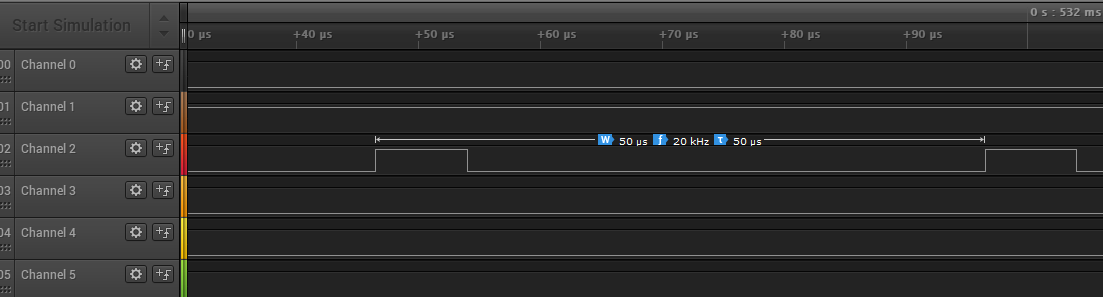
其中发现下桥高电平期间会出现低电平问题,是因为逻辑分析仪采样问题,在设置为500KS/S时候,低电平时间正好是2us。

在在设置为1MS/S时候,低电平时间正好是1us.

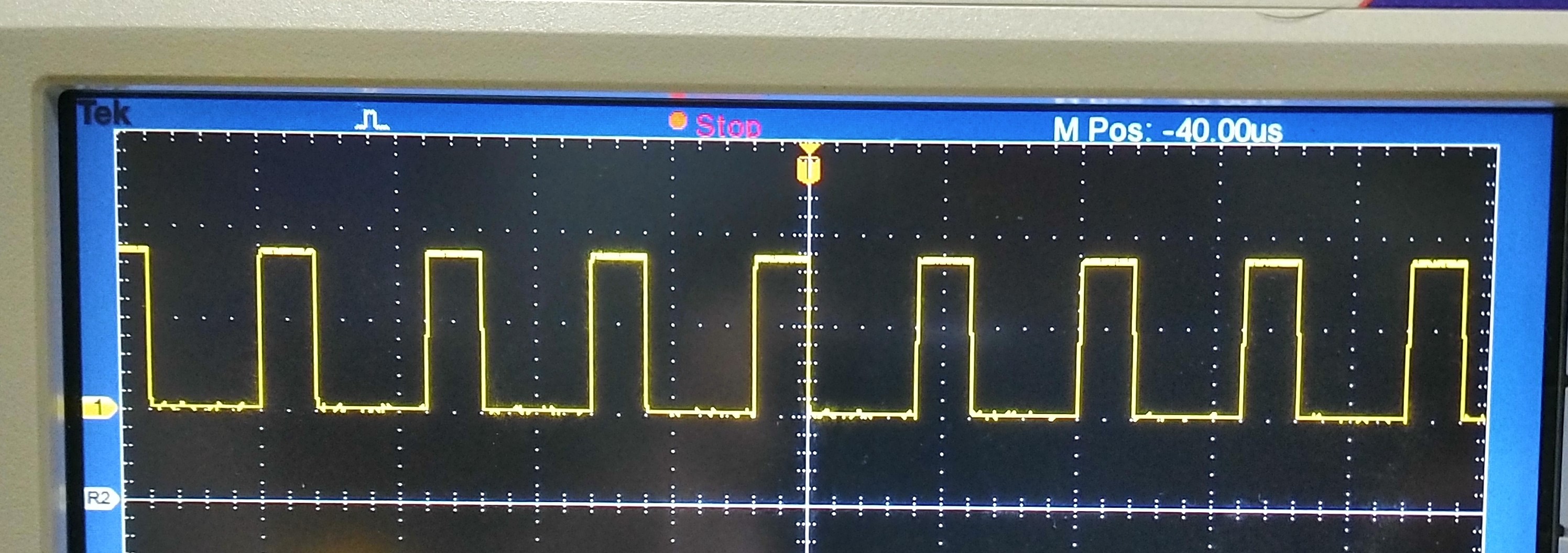
而用示波器(只有两路)看的波形则没有这种问题,在此留个小坑,待深入了解一下逻辑分析仪为什么会出现这种问题。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号