BLDC开发笔记1.原理及硬件部分
最*有个项目用到了BLDC,正好我也对电机驱动很感兴趣。在这里整理一下学习笔记。
此笔记会持续更新。
BLDC工作原理
BLDC工作原理网上已经很多资料,这里不再详细累述,推荐鹏芃科艺的相关无刷直流永磁电动机工作原理(这是我见过最好的3D模型解剖):http://www.pengky.cn/yongciDJ/04-wushuaYCDDJ-YL11/wushuaYCDJ-YL11.html
这里简单记下笔记。
-
有刷电机中的电刷换向器存在火花、无线电干扰、噪声,因磨损而寿命短等问题。而无刷直流电机(BLDC)不用电刷换相,使用电子开关换相。
-
硬件上,无刷电机主要采用三相逆变电路驱动

-
无刷直流电机,是靠定子磁场和转子磁场间的作用力拉动转子转动的。每一个线圈按照右手定则可以判断出单个线圈的磁场方向,两个线圈就通过矢量合成判断出合磁场方向,这样,三个线圈绕组由电子开关元件按规律接通直流电源,形成旋转磁场,从而牵引着转子旋转,整个过程就像毛驴上吊一根胡萝卜一样。
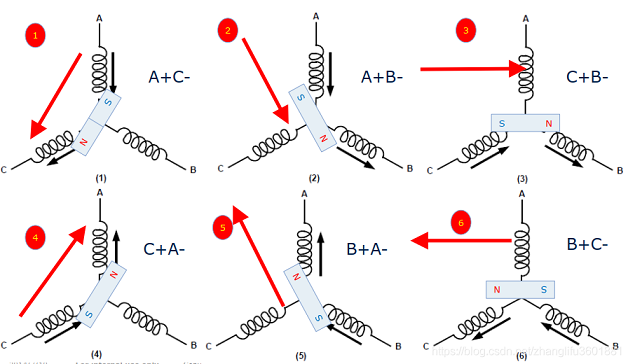
- 可以看到,转子在磁场中只有6个稳定状态,而且BLDC一般采用方波驱动,所以BLDC的转动实际上并不*滑,为了解决这个问题,就出现了多极(磁极对数)和多电机槽,比如两极BLDC,就从原本的360°里面“抖”6下,变成360°里面“抖”12下,极数越多越接**滑,类似于微积分思想。
BLDC和PMSM区别
无刷电机,主要分为BLDC和PMSM两种。
我们称前者为直流无刷电机(Brushless Direct Current Motor),后者为永磁同步电机(permanent magnet synchronous motor)。
她们的结构类似,都是永磁转子和绕组定子,BLDC也是同步电机,但由于定子绕组的互联方式不同,会产生不同的反电动势。绕组两端的压降,可以通过从供电电压减去反电动势算出。
-
BLDC具有梯形的反电动势
-
PMSM具有正弦形式的反电动势

由此我们可以对这两种电机进行区分。
软件控制上来说,一般而言,
- BLDC采用6节拍的方波驱动,但一些BLDC也可以使用FOC驱动,这里参考https://www.zhihu.com/question/50312245,以后玩到再详细解析
- PMSM采用FOC(矢量控制)驱动
两种电机各有优势。
- BLDC相较PMSM在功率密度、转矩惯量比上多15%
- 齿槽转矩、谐波分量等方面PMSM更具有优势
- PMSM的定子制作工艺更复杂,成本更高
PMSM以后再详细解析。
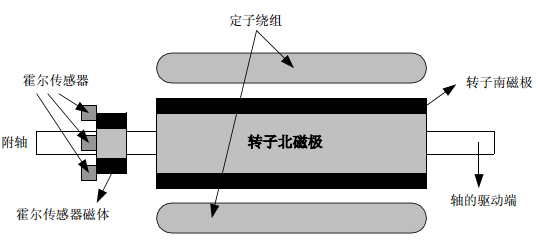
霍尔传感器
BLDC通过电子开关管的顺序导通让定子绕组顺序通电,形成旋转磁场,牵引永磁体转子运动。那么,什么时候导通哪一对开关管呢?什么时候导通哪一对绕组?这个问题,我们首先需要知道转子此时转到了6个状态中的哪一个,这就需要通过转子位置检测装置,目前主要采用光电器件和霍尔器件。由于手头上是霍尔传感器,所以实验以霍尔传感器为主。
霍尔传感器原理:
其实就是根据霍尔效应:在半导体上外加与电流方向垂直的磁场,会使得半导体中的电子与空穴受到不同方向的洛伦兹力(左手定则)而在不同方向上聚集,在聚集起来的电子与空穴之间会产生电场,电场力与洛伦兹力产生*衡之后,不再聚集,此时电场将会使后来的电子和空穴受到电场力的作用而*衡掉磁场对其产生的洛伦兹力,使得后来的电子和空穴能顺利通过不会偏移,这个现象称为霍尔效应。而产生的内建电压称为霍尔电压。
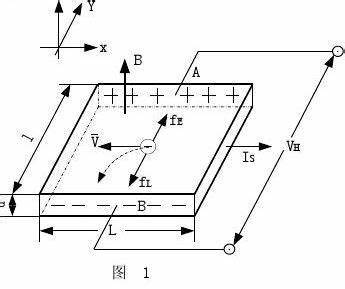
电流方向不变,磁场方向改变,霍尔电压随之改变。
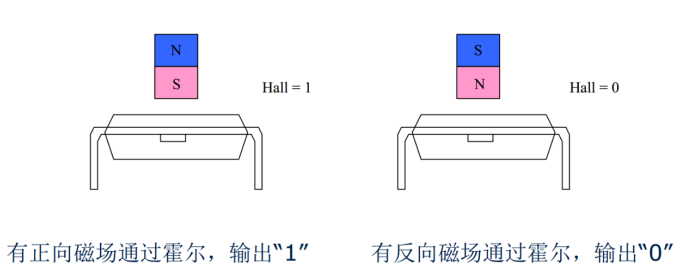
BLDC有的会在定子嵌入三个霍尔传感器(工艺复杂成本高),有的则将霍尔传感器安装在另外的PCB板上,并且在转子上安装霍尔传感器磁体(成本低)。每当转子磁极经过霍尔传感器附*时,霍尔传感器她们便会发出高电*和低电*,根据三个霍尔信号的组合,我们就能知道转子的位置。
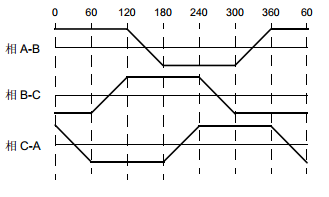
根据霍尔传感器的安装位置,输出信号之间的相移可以是60°或者120°。
需要注意的是,60°安装的霍尔会产生000和111,但是120°安装则没有,利用这个点就可以区分60°或120°安装。
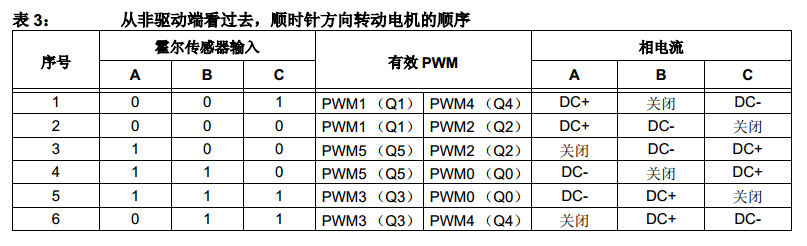
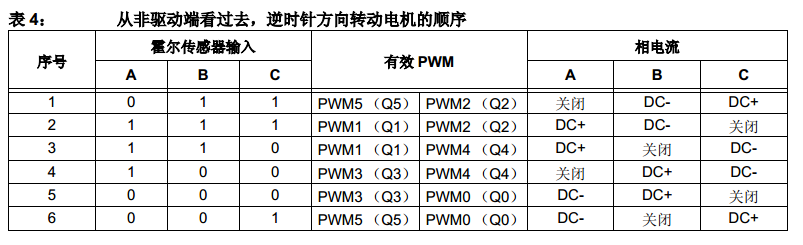
一般而言,电机厂商会根据霍尔安装定义应遵循的换相时序。例如
如果电机厂商没有时序表,则只能自己通过实验得出(太坑爹了有木有)。
硬件驱动方案
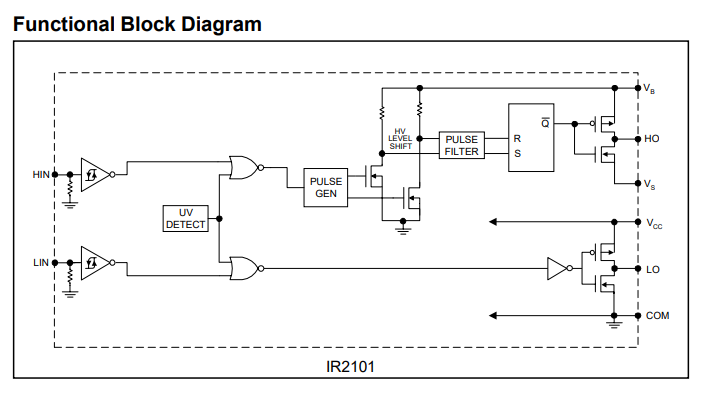
硬件驱动方案我这里选择的是IR2101驱动PSMN011-80YS,MCU选择的是ST的f103。6路PWM由f103的高级定时器TIM1提供,这部分按逻辑要求连接即可。
驱动部分以其中一路为例,f103与IR2101之间加了光耦隔离,当然也可以不加直接驱动,IR2101是支持3.3V的逻辑电*输入的,加入的目的主要是即使后续电路损坏也不会影响主控部分。
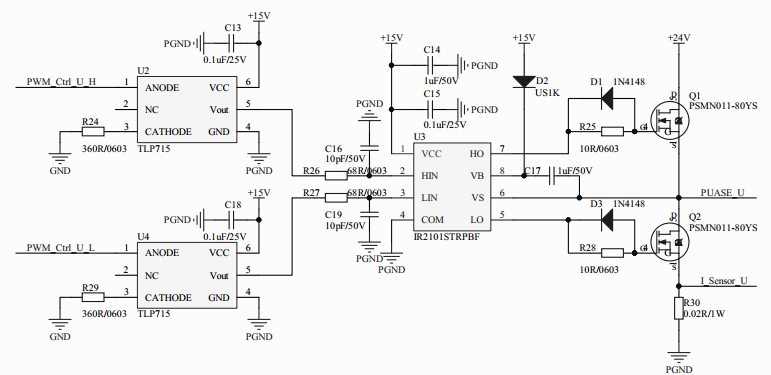
IR2101内部做了高边驱动处理,只要在外面加上一个电容和一个二极管就能组成boost升压驱动电路,所以省去了很多麻烦,当然选择其他IR系列直接驱动6个mos管也可以,而且也有很多集成方案(太贵了)。
原理分析:
- 根据我们之前的分析,一个时间会有两个mos管同时导通,让两个绕组通电。
- 下桥臂的N-MOS导通由于S极接地,所以只要 \(U_{gs}>U_{th}\) ,就能导通,关键是上桥。
- 我们让对应的下桥臂先导通,给上桥的N-MOS施加PWM波,高电*导通,但导通后S极会变为24V,那么我们此时需要 \(24+U_{th}\) 这么大的电压才能让N-mos导通,boost电路就发挥了作用,由于我们G极输入的是PWM波,根据电容两端电压不能突变的原理,N-MOS在PWM来的瞬间导通后在S极的24V会经过C17电容到达 \(V_B\) ,与C17电容上原本的电压 \(15V\)叠加产生一个理想情况下大约 \(15+24=39V\) 左右的电压(实际上由于管子压降会变小),这个39V电压会通过IR2101内部开关管驱动 \(H0\) ,保证在高电*一段时间内都能正常导通。D2二极管主要起到单向导通作用。
需要注意的是,霍尔传感器内部假设厂家没有处理,可能是OC/OD输出,需要加上拉电阻才能输出高电*,并且如果MCU的GPIO口不是兼容5V的,可以加肖特基二极管上拉至3.3V钳位保护。
后续电流环部分用到电流采样电路,会继续更新。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号