线性代数11.矩阵空间、秩1矩阵和小世界图
矩阵空间
矩阵空间就是一些矩阵的集合。
向量空间的运算同样适用于矩阵空间,可以进行矩阵加法和数乘,注意不包括矩阵相乘,矩阵空间只考虑加法和数乘封闭性。
把 \(R^n\) 的概念延申到 \(R^{n*n}\),矩阵空间可以看成一种新的向量空间。
\(3*3\) 矩阵
以下讨论均以 \(3*3\) 矩阵 为例:
3*3矩阵构成矩阵空间记为 \(M\) ,子空间有
- 上三角矩阵,记为 \(U\)
- 对称矩阵,记为 \(S\)
- 对角矩阵,记为 \(D\)
我们想要知道她们的维数,就需要看她们的基由多少个向量组成。
M
类比向量,一个向量有n个可以独立变化的元素,就在n维空间里面,类似的,所有3*3矩阵有9个可以独立变化的元素,所以她在9维空间里面。
M的基由9个矩阵构成:
S
对称矩阵有6个可以独立变化的元素,所以她在6维空间里。
U
上三角矩阵有6个可以独立变化的元素,所以她在6维空间里。
D(S∩U)
S∩U就是对角矩阵,对角矩阵有3个可以独立变化的元素,所以她在3维空间里。
S+U
S+U的意思是,任取S和U中元素/矩阵相加构成新矩阵,最终可以得到所有3*3矩阵,在9维空间里面。
定理
从上面分析中,我们可以得到:
这个式子是通用的。
拓展
我们构造一个新的没有向量的向量空间。她来自微分方程。
解是 \(y=C_1cosx+C_2sinx\).
这是一个向量空间,一组基就是 \(cosx\) 和 \(sinx\) ,维度是2,
这个例子的要点是,这些不是向量,是函数,但我们可以当成向量来看待。
所以线性代数内容不仅仅可以用于矩阵。
秩为1矩阵
可以看出,第二行是第一行的2倍,第三列是前两列相加,第二列又是第一列4倍,所以秩为1,列空间维度是1.
\(A\) 可以表示成一种更漂亮的形式:
可以表示成 主列 乘以 主行。
一列乘以一行结果是个矩阵。
所有的秩1矩阵都可以表示为一列乘以一行的形式。
其中,\(u、v\) 表示列向量,\(v\) 转置表示行向量。
秩1矩阵有趣地方在于,她可以称为搭建其他矩阵的“积木”。
如果有一个 \(5*17\) 的矩阵,秩为4,可以把其分解为4个秩1矩阵的组合。
子空间
例1:
所有的秩4矩阵能构成一个子空间吗?
子空间需要满足加法和数乘封闭性。
性质:两个矩阵之和的秩不大于两个矩阵的秩之和。
所以两个秩4矩阵相加,结果可能是秩5矩阵。所以不是子空间。
例2:
假设在 \(R^4\) 空间中,$v=\left(
\begin{array}{c}
v_1 \
v_2 \
v_3 \
v_4 \
\end{array}
\right) $ ,所有的分量满足\(s=v_1+v_2+v_3+v_4=0\) 。\(s\) 是一个子空间吗?是。
证明:
- 任取某分量之和为零的向量,乘以6的新向量还是在 \(s\) 中;
- 任取两个满足分量之和为零的向量相加,新向量还是在 \(s\) 中。
\(s\) 的维数和基是什么?
我们可以通过将目标矩阵转换为基本子空间,求四个基本子空间的维度和基的系统方法求出来。
观察 \(s\) 的特点,我们可以联系 \(Ax=0\) 。
即假设 \(s\) 是某个矩阵的零空间,即 \(s=x\),可以找出
因此 \(s=N(A)\),\(A\) 的秩为1,求零空间维数公式为
因此 \(s\)在3维空间里面.
自由变量为 \(v_2,v_3,v_4\),依次对她们任意赋值,求出主变量,可以求得三个线性无关向量,这三个线性无关向量就是 \(s\) 的一组基。
小世界图
什么是"图"?图是结点和边的集合,边连接结点。
例如,5个点和6条边。
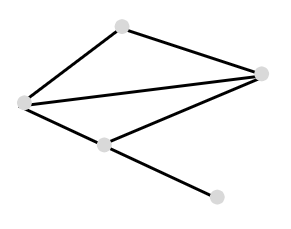
一个\(5*6\) 的矩阵可以表示这个图的全部信息。
有趣的问题是一个结点到任意一个结点共需要多少步?“六度分离猜想”解决了这个问题。下节课分解。
