
进程间的通信方式
进程间的通信方式包括,管道、共享内存、信号、信号量、消息队列、套接字。
进程间通信的目的
进程间通信的主要目的是:数据传输、数据共享、事件通知、资源共享、进程控制等。
进程间通信之管道
管道(pipe):这种通讯方式有两种限制,一是半双工的通信,数据只能单向流动,二是只能在具有亲缘关系的进程间使用。进程的亲缘关系通常是指父子进程关系。
流管道(s_pipe): 去除了第一种限制,可以双向传输。
命名管道(name_pipe):克服了管道没有名字的限制,还允许无亲缘关系进程间的通信。
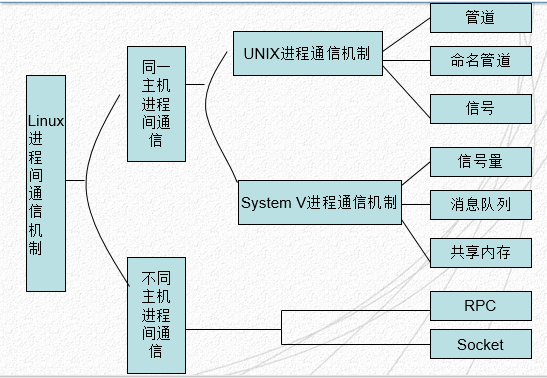
Linux进程间通信机制
管道的创建
pipe函数创建一个通信缓冲区,程序可以通过文件描述符fildes[0]和fildes[1]来访问这个缓冲区。返回值:成功返回0,错误返回-1。
#include<unistd.h> int pipe(int fd[2]);
管道的读写
参数fd为管道描述符,同文件描述符,可以使用文件I/O函数(close, read, write)对其进行操作。fd[0]为管道读端,fd[1]为管道写端。如不需要,可以关闭相应端的描述符。写入fd[1]的数据可以按照先进先出的顺序从fildes[0]中读出。
ssize_t read(fd[0], void *buf, size_t count); ssize_t write(fd[1], void *buf, size_t count);
管道的实现
调用fork()创建两个子进程,使用系统调用pipe()建立一个管道,两个子进程分别向管道各写一句话:
Child process 1 is sending a message!
Child process 2 is sending a message!
而父进程则从管道中读出来自于两个子进程的信息,显示在屏幕上。然后分别结束两个子进程。
注意事项:父进程和两个子进程间需要同步,使用waitpid()函数实现父进程等待子进程运行完毕后从管道中读取数据并打印。
由于fork函数让子进程完整地拷贝了父进程的整个地址空间,所以子进程都有管道的读端和写端。所以在相关进程中最好关掉不用的那一端。
要求“父进程先接收子进程P1发来的消息,然后再接收子进程P2发来的消息。”存在两个同步问题,两个子进程和父进程之间(先子写后父读)同步、子进程1和子进程2之间(先1写,再2写)。流程图如下所示:
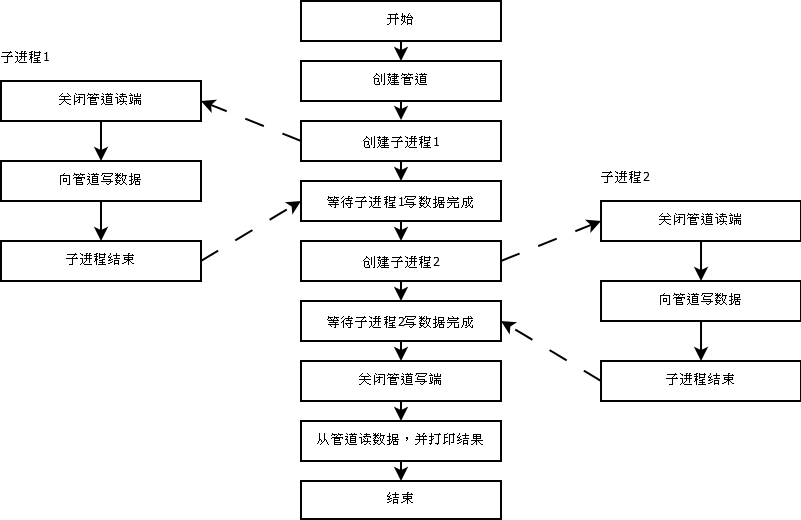
管道实现进程间通信流程图
#include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <string.h> #include <errno.h> #include <sys/types.h> #include <sys/wait.h> int main() { int status; pid_t p1; pid_t p2; int fd[2]; char revbuf[100]; int ret = pipe(fd); // 创建管道 if (ret == -1) // 管道返回值为-1则失败 { perror("Pipe error!\n"); exit(1); } if ((p1 = fork()) == 0) //子进程p1 { char *child1 = "Child process 1 is sending a message!"; close(fd[0]); //关闭管道读端 write(fd[1], child1, strlen(child1)); //子进程1向管道写数据 } else if (p1 > 0) //父进程 { waitpid(p1, &status, 0); if ((p2 = fork()) == 0) //子进程p2 { char *child2 = "Child process 2 is sending a message!"; close(fd[0]); //关闭管道读端 write(fd[1], child2, strlen(child2)); //子进程2向管道写数据 } else if (p2 > 0) //父进程 { close(fd[1]); //关闭管道写端 // waitpid(p1, &status, 0); read(fd[0], revbuf, 100); printf("The msg1: %s\n", revbuf); waitpid(p2, &status, 0); read(fd[0], revbuf, 100); printf("The msg2: %s\n", revbuf); } else //创建进程2失败 { perror("Fork p2 error!\n"); exit(1); } } else //创建进程1失败 { perror("Fork p1 error!\n"); exit(1); } return 0; }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号