ROS小车STM32底板代码学习
用的是幻尔科技的新推出的ROS小车的STM32控制底板价格
他的代码是用HAL库写的,而且资料很少,刚开始连ROS1功能包都还在测试。
代码有300多M,编译一次,直接吃席。所以我用轮趣科技的ROS小车代码移植,采用的FreeRTOS写的,跟我学的代码风格几乎一致
移植过程中你会发现,电路很多地方都一致,盲猜有抄板。
注意:幻尔科技的没有电位器,无法通过改变电位器电平来改变车型。所以我在代码中直接固定了车型,手头电机有限,就选择差速小车。只需要两个轮子。
他这边的车型选择将ADC电平分段表示的注释掉,直接选择3号差速。OLED那边也是一样直接定死。
void Robot_Select(void)
{
// Divisor_Mode=2048/CAR_NUMBER+5;
// Car_Mode=(int) ((Get_adc_Average(Potentiometer,10))/Divisor_Mode); //Collect the pin information of potentiometer //²É¼¯µçλÆ÷Òý½ÅÐÅÏ¢
// if(Car_Mode>5)Car_Mode=5;
Car_Mode=3;
switch(Car_Mode)
{
case Mec_Car: Robot_Init(MEC_wheelspacing, MEC_axlespacing, 0, HALL_30F, Hall_13, Mecanum_75); break; //Âó¿ËÄÉÄ·ÂÖС³µ
case Omni_Car: Robot_Init(0, 0, Omni_Turn_Radiaus_109, HALL_30F, Hall_13, FullDirecion_60); break; //È«ÏòÂÖС³µ
case Akm_Car: Robot_Init(Akm_wheelspacing, Akm_axlespacing, 0, HALL_30F, Hall_13, Black_WheelDiameter); break; //°¢¿ËÂüС³µ
case Diff_Car: Robot_Init(Diff_wheelSpacing, 0, 0, HALL_30F, Hall_13, Black_WheelDiameter); break; //Á½ÂÖ²îËÙС³µ
case FourWheel_Car: Robot_Init(Four_Mortor_wheelSpacing, Four_Mortor__axlespacing, 0, HALL_30F, Hall_13, Black_WheelDiameter); break; //ËÄÇý³µ
case Tank_Car: Robot_Init(Tank_wheelSpacing, 0, 0, HALL_30F, Hall_13, Tank_WheelDiameter); break; //ÂÄ´ø³µ
}在system.c里面也有定义。可以统一定所有的mode
u8 Car_Mode=3;
// Robot type variable
//机器人型号变量
//0=Mec_Car,1=Omni_Car,2=Akm_Car,3=Diff_Car,4=FourWheel_Car,5=Tank_Car现在出现问题,在下载好我修改过后的代码后(还有按键、灯,OLED显示我都修改过了。)
差速小车模式。轮趣代码的AB电机对应这边24电机。
这边仔细对比了一下原理图,发现电机驱动器和编码器的对应有不同的地方,需要在编码器代码的初始化部分修改。(已修改,用蓝牙控制差速小车的两个电机正常。用ROS键盘控制今天有点问题,估计也是对应的问题。)
在修改编码器和电机驱动器的代码的时候,我有一些困扰,后来只按照电路表改了编码器的接口。
现在总结一下,motor.c就是电机驱动器,用两个PWN信号控制电机转速的。encoder.c就是编码器,他只是给外部编码器点击一个接口,同时通过时钟信号能够计算编码器传出来的转速。
总结:motor.c用来控制电机,encoder.c用来计算电机转速。
目前已经移植完毕,现在系统的顺一遍代码的流程。
首先看主函数main.c:
#include "system.h"
//Task priority //任务优先级
#define START_TASK_PRIO 1
//Task stack size //任务堆栈大小
#define START_STK_SIZE 256
//Task handle //任务句柄
TaskHandle_t StartTask_Handler;
//Task function //任务函数
void start_task(void *pvParameters);
//Main function //主函数
int main(void)
{
systemInit(); //Hardware initialization //硬件初始化
//Create the start task //创建开始任务
xTaskCreate((TaskFunction_t )start_task, //Task function //任务函数
(const char* )"start_task", //Task name //任务名称
(uint16_t )START_STK_SIZE, //Task stack size //任务堆栈大小
(void* )NULL, //Arguments passed to the task function //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //Task priority //任务优先级
(TaskHandle_t* )&StartTask_Handler); //Task handle //任务句柄
vTaskStartScheduler(); //Enables task scheduling //开启任务调度
}
//Start task task function //开始任务任务函数
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //Enter the critical area //进入临界区
//Create the task //创建任务
xTaskCreate(Balance_task, "Balance_task", BALANCE_STK_SIZE, NULL, BALANCE_TASK_PRIO, NULL); //Vehicle motion control task //小车运动控制任务
xTaskCreate(MPU6050_task, "MPU6050_task", MPU6050_STK_SIZE, NULL, MPU6050_TASK_PRIO, NULL); //IMU data read task //IMU数据读取任务
xTaskCreate(show_task, "show_task", SHOW_STK_SIZE, NULL, SHOW_TASK_PRIO, NULL); //The OLED display displays tasks //OLED显示屏显示任务
xTaskCreate(led_task, "led_task", LED_STK_SIZE, NULL, LED_TASK_PRIO, NULL); //LED light flashing task //LED灯闪烁任务
xTaskCreate(pstwo_task, "PSTWO_task", PS2_STK_SIZE, NULL, PS2_TASK_PRIO, NULL); //Read the PS2 controller task //读取PS2手柄任务
xTaskCreate(data_task, "DATA_task", DATA_STK_SIZE, NULL, DATA_TASK_PRIO, NULL); //Usartx3, Usartx1 and CAN send data task //串口3、串口1、CAN发送数据任务
vTaskDelete(StartTask_Handler); //Delete the start task //删除开始任务
taskEXIT_CRITICAL(); //Exit the critical section//退出临界区
}这边的FreeRTOS的代码跟正点原子的代码风格很像,所以看的比幻尔科技的亲切很多。
system.h是system.c的头文件中定义了很多函数头文件和函数初始化以及参数的定义。放在统一的文件中,方便所有文件使用,不需要一个一个的对应添加了。
systemInit()硬件初始化在system.c文件中定义,包括各种硬件外设的初始化等。
接下来就是各种任务的创建,他们的6个任务的优先级和堆栈大小任务函数都在各自的函数文件中定义。
这边都没定义任务句柄,也就是不存在挂起和恢复的操作。
看电机相关的编码器和电机驱动的函数encoder.c和motor.c
void Encoder_Init_TIM2(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能定时器
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA|RCC_AHB1Periph_GPIOB, ENABLE); //使用A B口
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15; //PA15
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //PB3
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource15,GPIO_AF_TIM2); //复用为TIM2 编码器接口
GPIO_PinAFConfig(GPIOB,GPIO_PinSource3,GPIO_AF_TIM2); //复用为TIM2 编码器接口
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // No prescaling //不分频
TIM_TimeBaseStructure.TIM_Period = ENCODER_TIM_PERIOD; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //选择时钟分频:不分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //初始化定时器
TIM_EncoderInterfaceConfig(TIM2, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使用编码器模式3
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = 0;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//清除TIM的更新标志位
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
TIM_SetCounter(TIM2,0);
TIM_Cmd(TIM2, ENABLE);
}
int Read_Encoder(u8 TIMX)
{
int Encoder_TIM;
switch(TIMX)
{
case 2: Encoder_TIM= (short)TIM2 -> CNT; TIM2 -> CNT=0; break;
case 3: Encoder_TIM= (short)TIM3 -> CNT; TIM3 -> CNT=0; break;
case 4: Encoder_TIM= (short)TIM4 -> CNT; TIM4 -> CNT=0; break;
case 5: Encoder_TIM= (short)TIM5 -> CNT; TIM5 -> CNT=0; break;
default: Encoder_TIM=0;
}
return Encoder_TIM;
}
void TIM2_IRQHandler(void)
{
if(TIM2->SR&0X0001) //Overflow interrupt //溢出中断
{
}
TIM2->SR&=~(1<<0); //Clear the interrupt flag bit //清除中断标志位
}这是encoder.c代码,我只截取其中一个定时器和读取和终端程序(太长了)
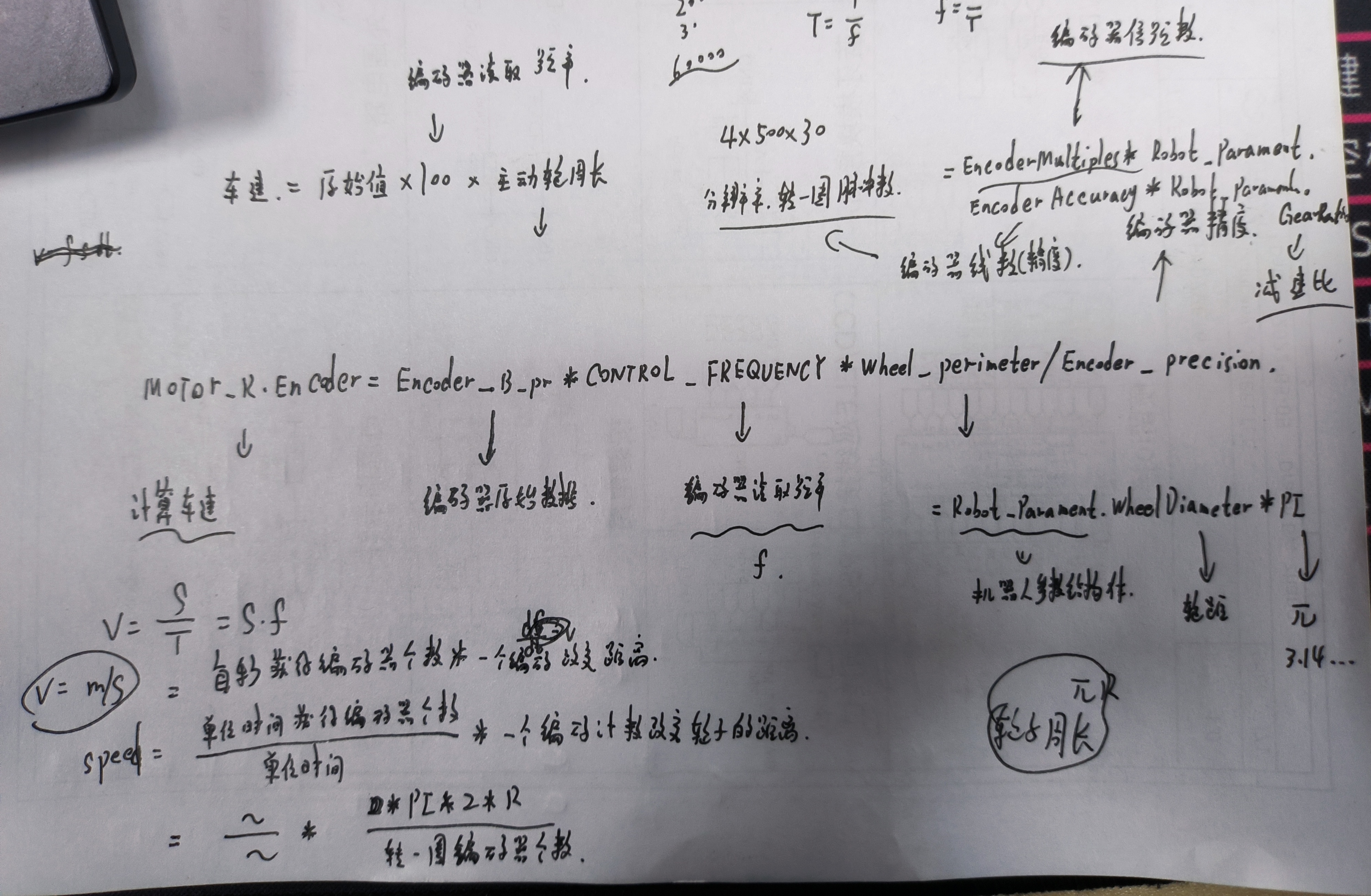
这边是增量式编码器(正交编码器),通过两个信号线的脉冲输出来处理,一个输出脉冲信号就对应一个增量位移,编码器每转动固定的位移,就会产生一个脉冲信号,读取单位脉冲信号的数量,就可以达到测速效果,v=S/t。通过对脉冲信号的累加和编码器的码盘的周长(转一圈距离)就可以达到行走距离效果(S=n*d)
编码器信号:
A 脉冲输出
B 脉冲输出
Z 零点信号 当编码器旋转到零点时,Z信号会发出一个脉冲表示现在是零位置 表示编码器转了1圈,可用来记录编码器转了多少圈,从而知道运行距离
VCC 电源线
GND 地线
编码器线数:
编码器的线数 ,是说编码器转一圈输出多少个脉冲,如果一个编码器是500线,说明这个编码器转一圈对应的信号线会输出500个脉冲, A B两相转一圈发出的脉冲数一样的,不过存在90°相位差。线数越大代表编码器能够反映的位置精度越高
编码器原理:
增量式编码器有两个脉冲输出,A相和B相,并且两个相位永远存在90°相位差。 如果两个信号相位差为90度,则这两个信号称为正交。由于两个信号相差90度,因此可以根据两个信号哪个先哪个后来判断方向、并且可以根据AB相脉冲信号数量测得速度,位移等
这边我自己的理解:想象成没刹车的自行车(靠踏板制动甚至倒退)的两个踏板,永远是相差180°,以最下面为Z点,两侧踏板每过一次,算各自的一圈。假设右踏板为A,左踏板为B。假设开始保持两个踏板跟地面平行。那么向前的时候,A踏板先过Z,超前B180°,制动并后退的时候,B逆时针过Z,超前A180°。单位时间过Z的次数可以计算速度和距离(需要轮子周长)
正转的时候信号线A先输出信号,信号线B后输出 A相超前B相90度 是正转
反转的时候信号线B先输出信号,信号线A后输出 B相超前A相90度 是反转
下图是STM32中文手册里面编码器接口模式的介绍定义
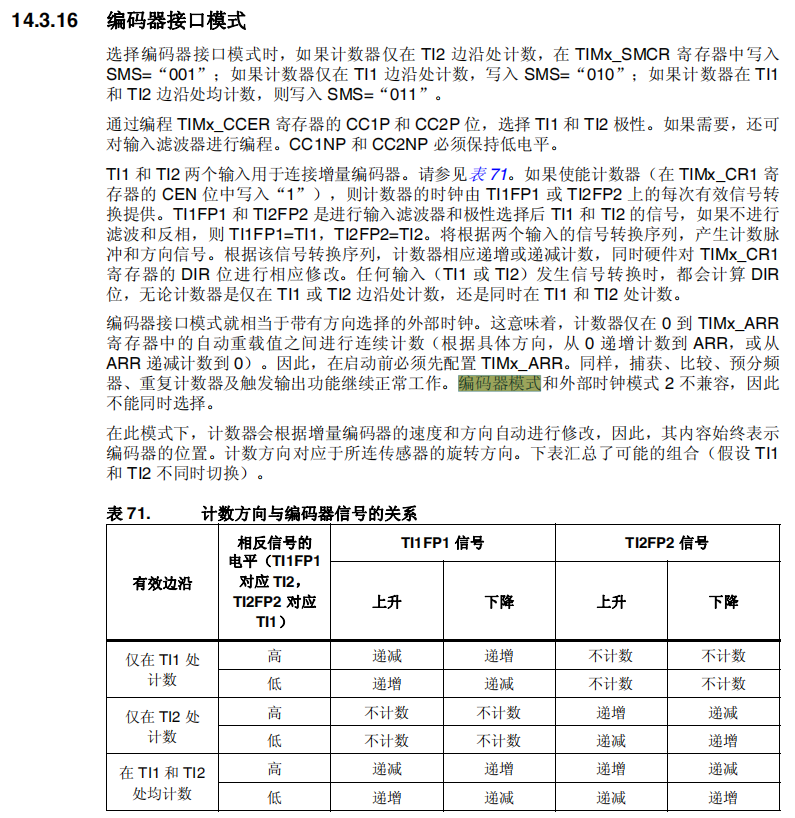
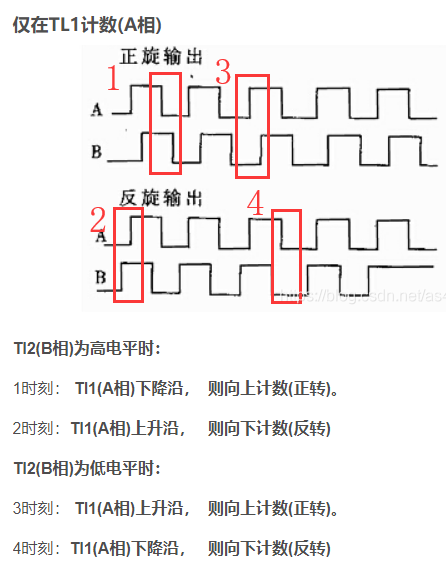
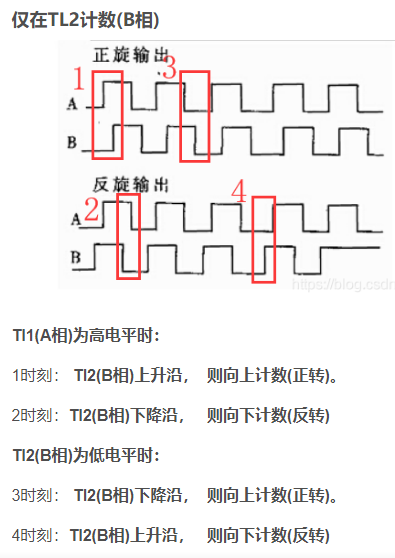
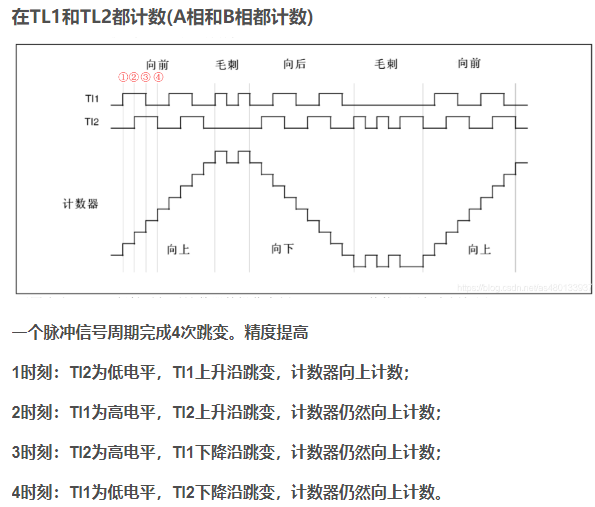
这边内容有点多,从别的博主那里截取几张图当理解。一共三个编码器模式。
TIM_EncoderInterfaceConfig(TIM2, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
TIMx参数就是使用哪个定时器作为编码器接口的捕捉定时器。
TIM_EncoderMode参数是模式,是单相计数(仅在TL1计数或仅在TL2计数)还是两相计数(在TL1和TL2都计数)。
TIM_IC1Polarity和TIM_IC2Polarity参数就是通道1、2的捕捉极性。(TIM_EncoderInterfaceConfig函数的后两个参数命名为TIM_ICPolarity_Rising实际使用的是反相和不反相的功能)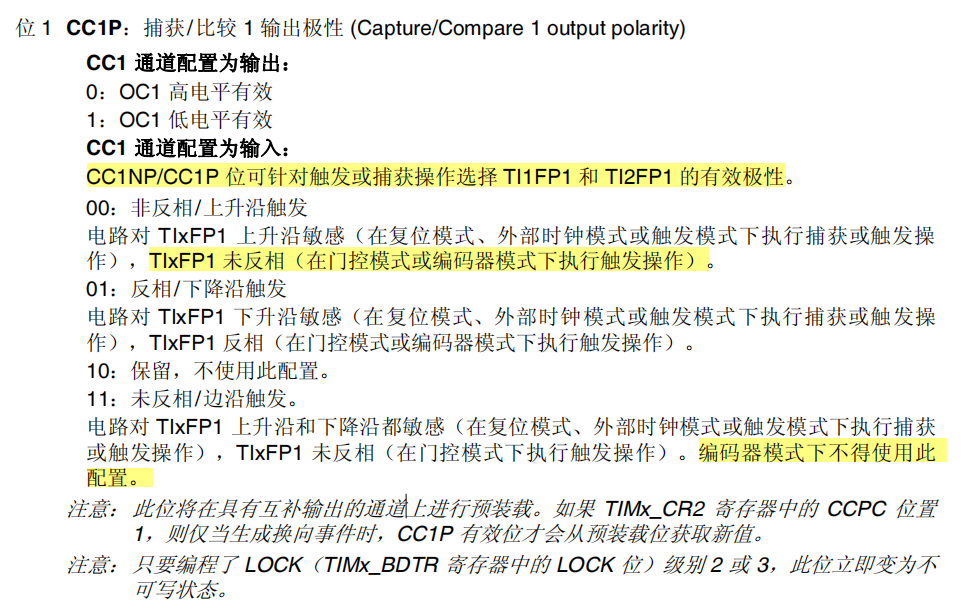
程序中通过对CNT计数的读取,获取编码器数值(原始数据)。
读取编码器的函数在计算电机速度的时候使用。在计算balance.c文件中的Get_Velocity_Form_Encoder()函数里面。其中
MOTOR_A.Encoder= Encoder_A_pr*CONTROL_FREQUENCY*Wheel_perimeter/Encoder_precision;函数我详细的计算了一遍。其实最终就是速度公式。
motor.c的程序
void TIM9_PWM_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM9,ENABLE);/*使能定时器11时钟*/
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE,ENABLE);/*使能GPIOF时钟*/
GPIO_PinAFConfig(GPIOE,GPIO_PinSource5,GPIO_AF_TIM9);/*复用*/
GPIO_PinAFConfig(GPIOE,GPIO_PinSource6,GPIO_AF_TIM9);/*复用*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5|GPIO_Pin_6; //GPIOF9
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOE,&GPIO_InitStructure); //初始化PF9
TIM_TimeBaseInitStructure.TIM_Period = arr;/*自动重装载*/
TIM_TimeBaseInitStructure.TIM_Prescaler = psc;/*预分频*/
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;/*时钟分频*/
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;/*向上计数*/
TIM_TimeBaseInit(TIM9,&TIM_TimeBaseInitStructure);/*初始化*/
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;/*PWM模式*/
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;/*输出*/
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;/*比较极性高*/
TIM_OC1Init(TIM9,&TIM_OCInitStructure);
TIM_OC2Init(TIM9,&TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM9,TIM_OCPreload_Enable);/*输出比较预装载使能*/
TIM_OC2PreloadConfig(TIM9,TIM_OCPreload_Enable);/*输出比较预装载使能*/
TIM_ARRPreloadConfig(TIM9,ENABLE);/*自动重载预装载使能*/
TIM_Cmd(TIM9,ENABLE);/*计数使能*/
}只截取其中一段PWM的初始化设置。可以看到这边的arr自动重装载值和预分频都是PWM配置参数。PWM模式1。输出PWM

通过计数时候对比CNT和CRR的值(在重装载值之内),判断高低电平。
TIM_OCPolarity这个参数比较极性高的意思是高电平有效。
Tout = ((arr+1)*(psc+1))/Tclk
这个公式就是计算一次重装载时间的计数时间T,倒数就是频率F。
Tclk是定时器时钟源,不是72MHz,看下图从正点原子里面截取的一张时钟图和两段文字介绍。
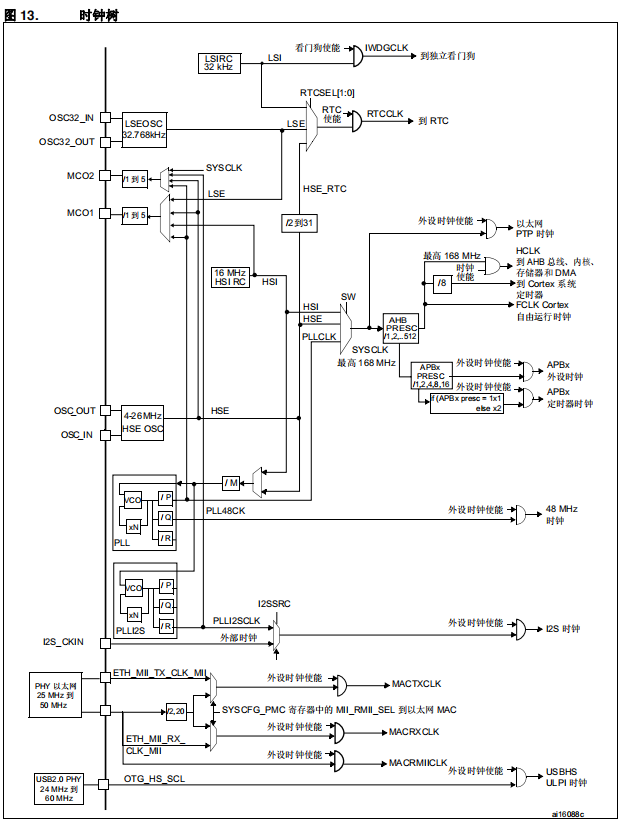


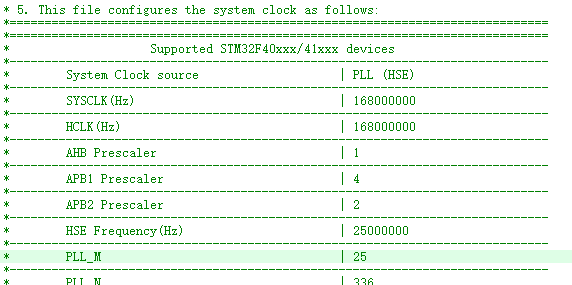
下图是在stm32里面的定义system_stm32f4xx.c文件里面。可以看到APB2的预分频系数为2.
根据上面所说,不为1的话就是APB域的频率的两倍。而APB2为84MHz,所以定时器时钟频率为84*2=168MHz
所以APB2时钟频率(不是域的频率)为168M,满PWM为16799,频率=168M/((16799+1)*(0+1))=10k。
PWM的输出频率为10KHZ,用来控制电机速度。PWM频率是指1秒钟内信号从高电平到低电平再回到高电平的次数(一个周期)
在motor.c里面定义的#define PWMA1 TIM10->CCR1,
捕获/比较寄存器TIMx_CCR1~4
在输出模式下,该寄存器的值与 CNT 的值比较,根据比较结果产生相应动作。利用这点,我们通过修改这个寄存器的值,就可以控制 PWM 的输出脉宽了。
在balance.c里面有个控制PWM输出控制前进后退的代码:
void Set_Pwm(int motor_a,int motor_b,int motor_c,int motor_d,int servo)
{
//Forward and reverse control of motor
//电机正反转控制
if(motor_a<0) PWMA1=16799,PWMA2=16799+motor_a;
else PWMA2=16799,PWMA1=16799-motor_a;
//Forward and reverse control of motor
//电机正反转控制
if(motor_b<0) PWMB1=16799,PWMB2=16799+motor_b;
else PWMB2=16799,PWMB1=16799-motor_b;
}截取前两个,这边看到因为AB两个轮子是相对放置,所以前后转应该相反,事实也是如此。定义的时候已经定义好
这边只看PWMA1和PWMA2控制,因为FI控制前进输入,BI控制后退输入。所以前进就是FI高电平输出,BI低电平输出。然后FO前进输出就是高电平,就可以前进了。
2023.9.2号,板子烧了,很奇怪,之前还好好的。(只有串口CH9102烧了,查不出原因,按道理只有短接会这样,但我都是架高的)
同时也翻了个错误,在航模遥控的定时器初始化那边,对于TIM8高级定时器的初始化,我将与轮趣不一样的引脚直接改成幻尔的定义,但是原本高级定时器TIM8的通道1-4就是PC6-9
我按照电路图直接修改了PC6-7为PA11-12。
那么原本的幻尔上板子的PC67是总线舵机的使用的三台输出模块的输入接口。这边就得好好琢磨一下。
在代码中,原本通道1和通道2也就是PC67是。CH1控制右摇杆(左右推,控制差速自转)。CH2控制左摇杆(前后控制前进后退)
如果板子修好后,继续能用,直接将原先的前进差速改成CH34来捕获。差速只需要这两个就行了。(暂时这么想,等板子回来,修不好的话,自己画或者直接买轮趣的了)
板子花100块修好了,继续之前的话题!!
也就是说观察代码,CH1和CH2两个通道控制前进后退,CH3控制油门(这个我感觉很奇怪)
发现了,CH3在代码中有个定义
在remote_control函数中,也就是航模控制的代码。其中
Remote_RCvelocity=RC_Velocity+RX;就是对油门的控制,其中RC_Velocity是小车默认速度500mm/s
RX是通道3设定的获取油门。
猜想:只需要通道1和通道2,就可以完成小车的前进后退,左右,速度是一个均值(由于幻尔的板子上得舵机这边的引脚和轮趣的差异不小,先这么尝试先)
幻尔这边,没有PC6和PC7在舵机这边用,被集成到芯片引脚上去了。所以只能使用PC8和PC9当前后左右了
也就是将原来CH1和CH2的活转到CH3和CH4上面。
11.1号移植成功,但是问题没有解决,摇杆归零速度不停,保持原来的速度,而且继续推杆会增加速度。(怀疑输入捕获的摇杆的推量被转换成了加速度,且在累加)
准备先测试一下航模接收机的信号(示波器,看看是不是正常方波信号的高电平变化)
void Remote_Control(void)
{
//Data within 1 second after entering the model control mode will not be processed
//对进入航模控制模式后1秒内的数据不处理
static u8 thrice=100;
int Threshold=100; //Threshold to ignore small movements of the joystick //阈值,忽略摇杆小幅度动作
//limiter //限幅
int LX,LY,RY,RX,Remote_RCvelocity;
Remoter_Ch1=target_limit_int(Remoter_Ch1,1000,2000);
Remoter_Ch2=target_limit_int(Remoter_Ch2,1000,2000);
Remoter_Ch3=target_limit_int(Remoter_Ch3,1000,2000);
Remoter_Ch4=target_limit_int(Remoter_Ch4,1000,2000);
// Front and back direction of left rocker. Control forward and backward.
//左摇杆前后方向。控制前进后退。
LX=Remoter_Ch2-1500;
//Left joystick left and right.Control left and right movement. Only the wheelie omnidirectional wheelie will use the channel.
//Ackerman trolleys use this channel as a PWM output to control the steering gear
//左摇杆左右方向。控制左右移动。麦轮全向轮才会使用到改通道。阿克曼小车使用该通道作为PWM输出控制舵机
LY=Remoter_Ch4-1500;
//Front and back direction of right rocker. Throttle/acceleration/deceleration.
//右摇杆前后方向。油门/加减速。
RX=Remoter_Ch3-1500;
//Right stick left and right. To control the rotation.
//右摇杆左右方向。控制自转。
RY=Remoter_Ch1-1500;
if(LX>-Threshold&&LX<Threshold)LX=0;
if(LY>-Threshold&&LY<Threshold)LY=0;
if(RX>-Threshold&&RX<Threshold)RX=0;
if(RY>-Threshold&&RY<Threshold)RY=0;
//Throttle related //油门相关
Remote_RCvelocity=RC_Velocity+RX;
if(Remote_RCvelocity<0)Remote_RCvelocity=0;
//The remote control command of model aircraft is processed
//对航模遥控控制命令进行处理
Move_X= LX*Remote_RCvelocity/500;
Move_Y=-LY*Remote_RCvelocity/500;
Move_Z=-RY*(PI/2)/500;
//Z轴数据转化
if(Car_Mode==Mec_Car||Car_Mode==Omni_Car)
{
Move_Z=Move_Z*Remote_RCvelocity/500;
}
else if(Car_Mode==Akm_Car)
{
//Ackermann structure car is converted to the front wheel steering Angle system target value, and kinematics analysis is pearformed
//阿克曼结构小车转换为前轮转向角度
Move_Z=Move_Z*2/9;
}
else if(Car_Mode==Diff_Car||Car_Mode==Tank_Car||Car_Mode==FourWheel_Car)
{
if(Move_X<0) Move_Z=-Move_Z; //The differential control principle series requires this treatment //差速控制原理系列需要此处理
Move_Z=Move_Z*Remote_RCvelocity/500;
}
//Unit conversion, mm/s -> m/s
//单位转换,mm/s -> m/s
Move_X=Move_X/1000;
Move_Y=Move_Y/1000;
Move_Z=Move_Z;
//Data within 1 second after entering the model control mode will not be processed
//对进入航模控制模式后1秒内的数据不处理
if(thrice>0) Move_X=0,Move_Z=0,thrice--;
//Control target value is obtained and kinematics analysis is performed
//得到控制目标值,进行运动学分析
Drive_Motor(Move_X,Move_Y,Move_Z);
}已成功,PID开环控制的问题,因为编码器没有检测到实际速度,导致PID闭环控制一直跟0速度比较,属于是开环起飞了。编码器上边的代码有问题,TIM2对应的引脚就是之前的代码,我擅自改了。
定时器引脚对应的通道是固定的。(傻了)。
本文来自博客园,作者:祈愿树下,转载请注明原文链接:https://www.cnblogs.com/cjl520/p/17645781.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号