Pytorch学习笔记(二)——Tensor
一、对Tensor的操作
从接口的角度讲,对Tensor的操作可以分为两类:
(1)torch.function (2)tensor.function
比如torch.sum(a, b)实际上和a.sum(b)功能等价。
从存储的角度讲,对Tensor的操作也可以分为两类:
(1)不修改自身数据,如a.add(b),加法结果返回一个新的tensor;
(2)修改自身数据,如a.add_(b),加法结果仍存在a中,a被改变。
函数名以_结尾的称为inplace方式。
二、Tensor的创建
常见的新建tensor的方法:
Tensor(*sizes) 基础构造函数,不分配空间,未初始化
ones(*sizes) 全1的tensor
zeros(*sizes) 全0的tensor
eye(*sizes) 对角线为1,其余为0,不要求行列数相同
arange(s, e, step) 从s到e,步长为step
linspace(s, e, steps) 从s到e,均匀切分成steps份
rand/randn(*sizes) 均匀/标准分布
normal(mean, std)/uniform(from, to) 正态分布/均匀分布
randperm(m) 随机排列
range(start, end, step),返回一个list对象也就是range.object,起始值为start,终止值为end,但不含终止值,步长为step。只能创建int型list。range的step不能是浮点型。
arange(start, end, step),与range()类似,也不含终止值。但是返回一个array对象。需要导入numpy模块(import numpy as np或者from numpy import*),arange可以使用浮点型数据。
Tensor既可以接收一个list,也可以根据指定形状新建tensor,还可以传入其他的tensor。
tensor.size()等价于tensor.shape()。
a = t.Tensor(2, 3) b = t.Tensor([[1, 2, 3], [4, 5, 6]]) print(b.tolist()) # 把tensor转为list print(b.size()) # 形状 print(b.numel()) # 元素总个数 c = t.Tensor(b.size())
通过tensor.view方法可以调整tensor的形状,但要保证调整前后元素总数一致。view不会更改自身数据,但是新的tensor与原tensor共享内存。也就是说更改其中一个,另一个也会跟着改变。
如果要添加或减少某一维度,就需要通过squeeze和unsqueeze函数。
a = t.arange(0, 6) print(a.view(2, 3)) b = a.view(-1, 3) # 当某一维为-1时,系统自动计算大小 print(b) print(b.unsqueeze(1)) # 在第一维度上增加一维 print(b.unsqueeze(-2)) # 在倒数第二维上增加一维
运行结果:

tensor([[0, 1, 2], [3, 4, 5]]) tensor([[0, 1, 2], [3, 4, 5]]) tensor([[[0, 1, 2]], [[3, 4, 5]]]) tensor([[[0, 1, 2]], [[3, 4, 5]]])
a = t.arange(0, 6) print(a.view(2, 3)) b = a.view(-1, 3) # 当某一维为-1时,系统自动计算大小 c = b.view(1, 1, 1, 2, 3) print(c.squeeze(0).size()) print(c.squeeze().size()) # 将所有维度为1的压缩
运行结果:
tensor([[0, 1, 2], [3, 4, 5]]) torch.Size([1, 1, 2, 3]) torch.Size([2, 3])
resize也可以用来调整tensor的大小。如果新尺寸超过了原始尺寸,那么会自动分配新的内存空间;而如果新尺寸小于原尺寸,则之前的数据依旧会保留。
a = t.arange(0, 6) b = a.view(-1, 3) # 当某一维为-1时,系统自动计算大小 a[1] = 100 # 由于a与b共享内存,所以a改变时b也会改变 b.resize_(1, 3) print(b) print(b.resize_(3, 3)) # 之前的数据并没有因为上一步的resize操作丢失
运行结果:
tensor([[ 0, 100, 2]]) tensor([[ 0, 100, 2], [ 3, 4, 5], [ 31244186271350784, 3775491366621020160, 5936959698761888869]])
Tensor支持与numpy.ndarray相似的索引操作。索引结果与原tensor共享内存。注意以下两种索引的区别:
a = t.randn(3, 4) print(a[0 : 1, : 2].size()) print(a[0, : 2].size())
运行结果:
torch.Size([1, 2])
torch.Size([2])
选择产生的结果与原tensor不共享内存空间。
torch.FloatTensor(2,3) 构建一个2*3 Float类型的张量
torch.DoubleTensor(2,3) 构建一个2*3 Double类型的张量
torch.ByteTensor(2,3) 构建一个2*3 Byte类型的张量
torch.CharTensor(2,3) 构建一个2*3 Char类型的张量
torch.ShortTensor(2,3) 构建一个2*3 Short类型的张量
torch.IntTensor(2,3) 构建一个2*3 Int类型的张量
torch.LongTensor(2,3) 构建一个2*3 Long类型的张量
torch.Tensor是默认的tensor类型(torch.FlaotTensor)的简称。
三、tensor数据类型转换
torch.long() 将tensor转换为long类型
torch.half() 将tensor转换为半精度浮点类型
torch.int() 将该tensor转换为int类型
torch.double() 将该tensor转换为double类型
torch.float() 将该tensor转换为float类型
torch.char() 将该tensor转换为char类型
torch.byte() 将该tensor转换为byte类型
torch.short() 将该tensor转换为short类型
几种数据类型转换的方式如下:
a = t.Tensor(2, 3) b = a.float() c = a.type_as(b) d = a.new(2, 3)
四、选择
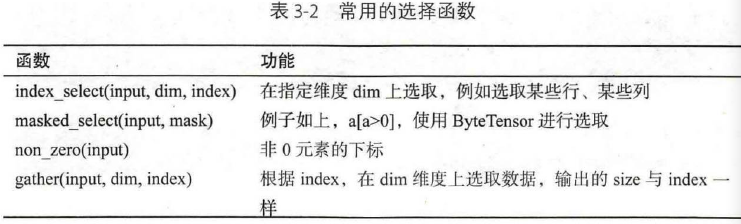
gather操作
对于一个二维tensor,输出的每个元素如下:
out[i][j] = input[index[i][j]][j] # dim = 0 out[i][j] = input[i][index[i][j]] # dim = 1
a = t.arange(0, 16).view(4, 4) index = t.LongTensor([[0, 1, 2, 3]]) print(a.gather(0, index)) # 提取对角线元素 index = t.LongTensor([[3, 2, 1, 0]]).t() # 针对2D tensor转置 print(a.gather(1, index)) # 提取反对角线元素 index = t.LongTensor([[3, 2, 1, 0]]) print(a.gather(0, index)) # 提取反对角线元素
运行结果:
tensor([[ 0, 5, 10, 15]]) tensor([[ 3], [ 6], [ 9], [12]]) tensor([[12, 9, 6, 3]])
gather的逆操作是scatter_,gather是把数据从input中按照index取出,而scatter_是把取出的数据再放回去。
高级索引
x[[1, 2], [1, 2], [2, 0]] # x[1, 1, 2]和x[2, 2, 0] x[[2, 1, 0], [0], [1]] # x[2, 0, 1], x[1, 0, 1], x[0, 0, 1] x[[0, 2], ...] # x[0]和x[2]
五、逐元素操作
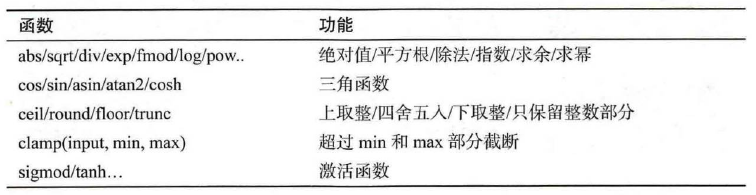
其中clamp实现的功能如下:

六、归并操作
使输出形状小于输入形状,并沿着某一维度进行指定操作。比如加法sum,既可以计算整个tensor的和,也可以计算tensor中每一行或者每一列的和。常用的归并操作如下:
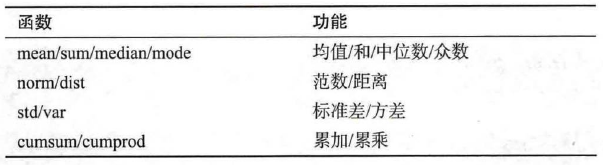
以上函数几乎都有一个dim参数,类似于numpy的axis,用于指定这些操作在哪个维度上执行。简单来说,假设输入形状为(m, n, k):
如果dim=0,则输出形状为(1, n, k)或(n, k);
如果dim=1,则输出形状为(m, 1, k)或(m, k);
如果dim=2,则输出形状为(m, n, 1)或(m, n)。
size中是否有“1”,取决于参数keepdim,如果keepdim=True会保留维度1。其中keepdim默认值为False。
七、比较操作
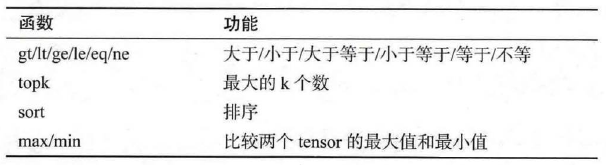
t.max(tensor) 返回tensor中最大的一个数
t.max(tensor, dim) 指定维度上的最大的数,返回tensor和下标
t.max(tensor1, tensor2) 比较两个tensor相比较大的元素
如果要比较一个tensor和一个数字,可以使用clamp函数。
a = t.linspace(0, 15, 6).view(2, 3) b = t.linspace(15, 0, 6).view(2, 3) print('a=', a) print('b=', b) print('a[a > b]=', a[a > b]) print('t.max(a)=', t.max(a)) print('t.max(b, dim = 1)=', t.max(b, dim = 1)) print('t.max(a, b)=', t.max(a, b))
运行结果:
a= tensor([[ 0., 3., 6.], [ 9., 12., 15.]]) b= tensor([[15., 12., 9.], [ 6., 3., 0.]]) a[a > b]= tensor([ 9., 12., 15.]) t.max(a)= tensor(15.) t.max(b, dim = 1)= (tensor([15., 6.]), tensor([0, 0])) t.max(a, b)= tensor([[15., 12., 9.], [ 9., 12., 15.]])
八、线性代数
pytorch的线性函数主要封装了Blas和Lapack。常用的线性代数函数如下:
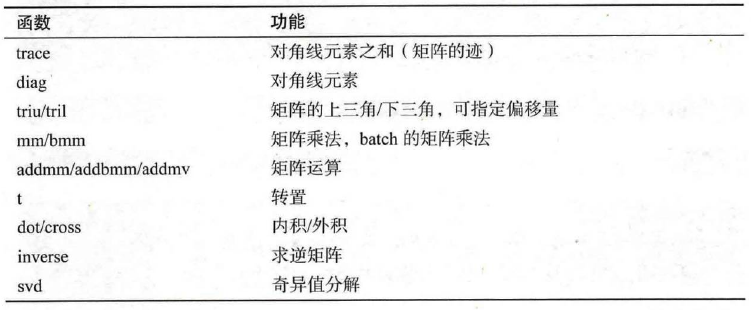
矩阵的转置会导致存储空间不连续,需要调用它的.contiguous方法将其转为连续。
九、Tensor和Numpy
numpy和tensor共享内存。当输入数组的某个维度的长度为1时,计算时沿此维度复制扩充成一样的形状。
广播的手动实现:
(1)unsqueeze或view:为数据某一维的形状补1;
(2)expand或expand_as:重复数组。不会占用额外的空间(repeat会复制多份数据,所以会占用额外空间)。
Numpy的广播法则:
(1)所有输入数组都向shape最长的数组看齐,shape中不足的部分通过在前面加1维补齐;
(2)两个数组要么在某一个维度上的长度一致,要么其中一个为1,否则不能计算。
尽量使用向量化计算,少用for循环。
大多数t.function都有一个参数out,产生的结果可以保存在out指定的tensor中。
t.set_printoptions可以用来设置打印tensor时的数值精度和格式。
十、练习:线性回归
代码:
import torch.nn as nn import torch as t from torch.autograd import Variable import torch.nn.functional as F import torch.optim as optim import torchvision as tv import torchvision.transforms as transforms from torchvision.transforms import ToPILImage from matplotlib import pyplot as plt # 设置随机数种子,保证在不同的计算机上运行时产生的输出一致 t.manual_seed(1000) def get_fake_data(batch_size = 8): # 产生随机数据,加入噪声 x = t.rand(batch_size, 1) * 20 y = x * 2 + (1 + t.randn(batch_size, 1)) * 3 return x, y x, y = get_fake_data() # 随机初始化参数 w = t.rand(1, 1) b = t.zeros(1, 1) lr = 0.001 for ii in range(20000): # forward y_pred = x.mm(w) + b.expand_as(y) loss = 0.5 * (y_pred - y) ** 2 loss = loss.sum() # backward dloss = 1 dy_pred = dloss * (y_pred - y) dw = x.t().mm(dy_pred) db = dy_pred.sum() # update parameters w.sub_(lr * dw) b.sub_(lr * db) x2 = t.arange(0, 20, 1.0).view(-1, 1) y2 = x2.mm(w) + b plt.plot(x2.numpy(), y2.numpy()) plt.scatter(x.squeeze().numpy(), y.squeeze().numpy()) plt.show()
运行结果:


【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】博客园社区专享云产品让利特惠,阿里云新客6.5折上折
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步