

 在之前的关于MC算法与SMC算法的博文中介绍了算法的实现,文章主要围绕算法的核心问题,即三角片如何产生的问题进行了详细的描述。但由于实际应用中需要的等值面Mesh数据不是三角片的简单并集,所以需要进行所谓的顶点焊接(Vertex Welding)来生成正确的拓扑结构以反应三角片之间的共用顶点关系。顶点焊接,简单的说就是把三角片中重合的顶点算作一个顶点加入顶点集。
在之前的关于MC算法与SMC算法的博文中介绍了算法的实现,文章主要围绕算法的核心问题,即三角片如何产生的问题进行了详细的描述。但由于实际应用中需要的等值面Mesh数据不是三角片的简单并集,所以需要进行所谓的顶点焊接(Vertex Welding)来生成正确的拓扑结构以反应三角片之间的共用顶点关系。顶点焊接,简单的说就是把三角片中重合的顶点算作一个顶点加入顶点集。
MC算法与SMC算法中的三角片焊接问题
在之前的关于MC算法与SMC算法的博文中介绍了算法的实现,文章主要围绕算法的核心问题,即三角片如何产生的问题进行了详细的描述。但由于实际应用中需要的等值面Mesh数据不是三角片的简单并集,所以需要进行所谓的顶点焊接(Vertex Welding)来生成正确的拓扑结构以反应三角片之间的共用顶点关系。顶点焊接,简单的说就是把三角片中重合的顶点算作一个顶点加入顶点集。在之前博文中的代码实现里,采用了一种MeshBuilder类来实现这样的顶点焊接。其核心思想是采用哈希表来避免顶点的重复加入,逻辑简单点说就是下面这几步:
- 对三角片集合中的所有三角形
- 对三角形的三个顶点
- 若顶点P在哈希表中不存在
- 将顶点P加入顶点列表
- 将P加入哈希表
- 若顶点P在哈希表中不存在
- 对三角形的三个顶点
- 结束循环
采用的哈希表是根据点坐标来计算哈希值的,这样相同的点必然对应一样的哈希值。这样重复的点就不会再被加入顶点列表。由于哈希表理论上有很好的存取速度,故MC算法和SMC算法即可采用此逻辑来将体元中的三角片焊接成具有拓扑结构的Mesh。
 |
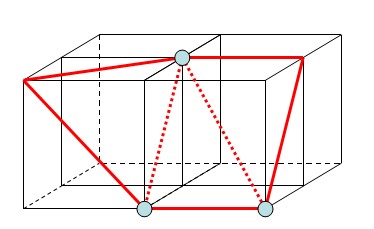 |
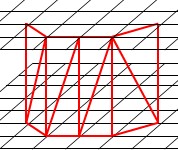
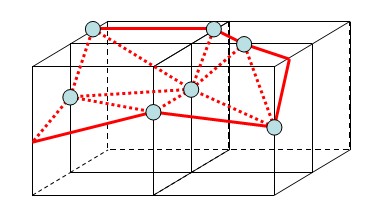
| MC算法的焊接顶点 | SMC算法的焊接顶点 |
一种新的设计
上文所述的实现方式是为了突出MC、SMC算法的“从每个体元中抽取三角片”的主逻辑而简化了顶点焊接的逻辑。事实上,采用上文说的哈希表会存在一定的时间和空间效率问题。之前的另一篇关于顶点焊接的文章“浅议顶点焊接与哈希表的设计”提出的几种哈希表,不能很好的同时兼顾时间和空间效率。在数据规模较大的情况下,顶点焊接逻辑很容易就成为算法的瓶颈。
例如使用三维数组哈希表,很明显需要sizeof(long)*with*height*depth的空间,是巨大的空间消耗。而使用二维数组堆砌哈希表,则容易让更多的时间花费在顺序查找链表上。归根结底,这些将顶点所有可能位置都考虑到的哈希表,没有充分利用MC/SMC算法三角片产生的局部特点。
考虑到MC/SMC中三角片是逐个从体元中抽取的,这样只有相邻两层的三角片顶点才可能产生重复现象如下图,那么三角片的产生,应该可以这样考虑:
- 抽取第i层体元的三角片并焊接之
- 抽取第i+1层体元的三角片并焊接之
- 焊接第i层三角片与第i+1层三角片

为此,可以设计一个有两层二维数组组成的哈希表,二维数组的尺寸都是width*height。用以表示一层体元上下两层顶点的可能的哈希位置。每抽取完一层的体元,这两层数组会往下自动推进一层,同时还需要有变量记录当前指示的层位置。
对于SMC算法,由于顶点只能在格点上,故基于此原理的哈希表可以实现如下:
class SMCTriangleNetHashTable { public int CurrentLayerIndex; int stx; int sty; int width; int height; List<int[,]> mapList; public SMCTriangleNetHashTable(int minx, int miny, int width, int height) { this.stx = minx - 1; this.sty = miny - 1; this.width = width + 2; this.height = height + 2; mapList = new List<int[,]>(2); mapList.Add(new int[this.width, this.height]); mapList.Add(new int[this.width, this.height]); SetDefaultValue(0); SetDefaultValue(1); } public void SetDefaultValue(int index0_1) { for (int i = 0; i < width; i++) { for (int j = 0; j < height; j++) { mapList[index0_1][i, j] = -1; } } } public void IncreaseIndex() { CurrentLayerIndex++; SetDefaultValue(0); int[,] temp = mapList[0]; mapList[0] = mapList[1]; mapList[1] = temp; } public void SetHashValue(int x, int y, int z, int value) { int index0_1 = z - CurrentLayerIndex; mapList[index0_1][x - stx, y - sty] = value; } public int GetHashValue(int x, int y, int z) { int index0_1 = z - CurrentLayerIndex; return mapList[index0_1][x - stx, y - sty]; } }
这样SMC算法的实现形式如下:
public class SMCProcessor { struct OriginalTriangle { public Int16Triple P0; public Int16Triple P1; public Int16Triple P2; public OriginalTriangle(int p0x, int p0y, int p0z, int p1x, int p1y, int p1z, int p2x, int p2y, int p2z) { P0.X = p0x; P0.Y = p0y; P0.Z = p0z; P1.X = p1x; P1.Y = p1y; P1.Z = p1z; P2.X = p2x; P2.Y = p2y; P2.Z = p2z; } } public static byte VULF = 1 << 0; public static byte VULB = 1 << 1; public static byte VLLB = 1 << 2; public static byte VLLF = 1 << 3; public static byte VURF = 1 << 4; public static byte VURB = 1 << 5; public static byte VLRB = 1 << 6; public static byte VLRF = 1 << 7; //以上为体素为实点的位标记 public static Int16Triple[] PointIndexToPointDelta = new Int16Triple[8] { new Int16Triple(0, 1, 1 ), new Int16Triple(0, 1, 0 ), new Int16Triple(0, 0, 0 ), new Int16Triple(0, 0, 1 ), new Int16Triple(1, 1, 1 ), new Int16Triple(1, 1, 0 ), new Int16Triple(1, 0, 0 ), new Int16Triple(1, 0, 1 ) };//体元内每个体素相对基准体素坐标的偏移 public static byte[] PointIndexToFlag = new byte[8] { VULF, VULB, VLLB, VLLF, VURF, VURB, VLRB, VLRF };//每个体素对应的位标记 BitMap3d bmp; int d; int h; int w; int wh; public SMCProcessor(BitMap3d bitmap) { this.bmp = bitmap; } public Mesh GenerateSurface() { d = bmp.depth; h = bmp.height; w = bmp.width; wh = w * h; Int16Triple[] temp = new Int16Triple[8]; Mesh m = new Mesh(); OriginalTriangle[] tempTriangles = new OriginalTriangle[4]; SMCTriangleNetHashTable hash = new SMCTriangleNetHashTable(0, 0, w, h); for (int k = 0; k <= d - 1; k++) { for (int j = 0; j <= h - 1; j++) { for (int i = 0; i <= w - 1; i++) { byte value = GetConfig(temp, bmp, i, j, k); if (value == 0 || value == 255) continue; int tcount = ExtractTriangles(temp, value, i, j, k, tempTriangles); for (int tindex = 0; tindex < tcount; tindex++) { MergeTriangleIntoMesh(m, hash, tempTriangles[tindex]); } } } hash.IncreaseIndex(); } return m; } private byte GetConfig(Int16Triple[] temp, BitMap3d flagsMap, int indexInWidth, int indexInHeight, int indexInDepth) { byte value = 0; for (int pi = 0; pi < 8; pi++) { temp[pi].X = indexInWidth + PointIndexToPointDelta[pi].X; temp[pi].Y = indexInHeight +PointIndexToPointDelta[pi].Y; temp[pi].Z = indexInDepth + PointIndexToPointDelta[pi].Z; if (temp[pi].X < w && temp[pi].X >= 0 && temp[pi].Y < h && temp[pi].Y >= 0 && temp[pi].Z < d && temp[pi].Z >= 0 && bmp.data[temp[pi].X + w * (temp[pi].Y) + wh * (temp[pi].Z)] == BitMap3d.WHITE) { value |= PointIndexToFlag[pi]; } } return value; } private int ExtractTriangles(Int16Triple[] temp, byte value, int indexInWidth, int indexInHeight, int indexInDepth, OriginalTriangle[] result) { int tcount = 0; if (SMCTable.TableFat[value, 0] != -1) { int index = 0; while (SMCTable.TableFat[value, index] != -1) { Int16Triple t0 = temp[SMCTable.TableFat[value, index]]; Int16Triple t1 = temp[SMCTable.TableFat[value, index + 1]]; Int16Triple t2 = temp[SMCTable.TableFat[value, index + 2]]; result[tcount] = new OriginalTriangle(t0.X, t0.Y, t0.Z, t1.X, t1.Y, t1.Z, t2.X, t2.Y, t2.Z); tcount++; index += 3; } } return tcount; } private void MergeTriangleIntoMesh(Mesh mesh, SMCTriangleNetHashTable hashMap, OriginalTriangle ot) { int p0x = ot.P0.X; int p0y = ot.P0.Y; int p0z = ot.P0.Z; int p1x = ot.P1.X; int p1y = ot.P1.Y; int p1z = ot.P1.Z; int p2x = ot.P2.X; int p2y = ot.P2.Y; int p2z = ot.P2.Z; int p0i; int p1i; int p2i; int index = 0; index = hashMap.GetHashValue(p0x, p0y, p0z); if (index == -1) { p0i = mesh.AddVertex(new Point3d(p0x, p0y, p0z)); hashMap.SetHashValue(p0x, p0y, p0z, p0i); } else { p0i = index; } index = hashMap.GetHashValue(p1x, p1y, p1z); if (index == -1) { p1i = mesh.AddVertex(new Point3d(p1x, p1y, p1z)); hashMap.SetHashValue(p1x, p1y, p1z, p1i); } else { p1i = index; } index = hashMap.GetHashValue(p2x, p2y, p2z); if (index == -1) { p2i = mesh.AddVertex(new Point3d(p2x, p2y, p2z)); hashMap.SetHashValue(p2x, p2y, p2z, p2i); } else { p2i = index; } Triangle t = new Triangle(p0i, p1i, p2i); mesh.AddFace(t); } }
对于MC算法,由于定点不在格点上,而是在格子的边上,这样必须要把格子的边与格点坐标相对应。不难发现,从每一个格点出发,想着X,Y,Z轴正方向可以引三条边,这样每一个边都能按此方法找到所出发的格点。于是这样就可以构造一个二维数组:
class MCTriangleNetHashTable { public int CurrentLayerIndex; int stx; int sty; int width; int height; List<int[,,]> mapList; public MCTriangleNetHashTable(int minx, int miny, int width, int height) { this.stx = minx - 1; this.sty = miny - 1; this.width = width + 2; this.height = height + 2; mapList = new List<int[,,]>(2); mapList.Add(new int[this.width, this.height,3]); mapList.Add(new int[this.width, this.height,3]); SetDefaultValue(0); SetDefaultValue(1); } public void SetDefaultValue(int index0_1) { for (int i = 0; i < width; i++) { for (int j = 0; j < height; j++) { mapList[index0_1][i, j, 0] = -1; mapList[index0_1][i, j, 1] = -1; mapList[index0_1][i, j, 2] = -1; } } } public void IncreaseIndex() { CurrentLayerIndex++; SetDefaultValue(0); int[,,] temp = mapList[0]; mapList[0] = mapList[1]; mapList[1] = temp; } public void SetHashValue(int x, int y, int z,int d, int value) { int index0_1 = z - CurrentLayerIndex; mapList[index0_1][x - stx, y - sty,d] = value; } public int GetHashValue(int x, int y, int z,int d) { int index0_1 = z - CurrentLayerIndex; return mapList[index0_1][x - stx, y - sty,d]; } }
基于此种设计的MC算法的实现代码如下:
public class MCProcessor { struct OriginalTriangle { public Int16Triple CellCoord; public int E0; public int E1; public int E2; public OriginalTriangle(int x, int y, int z, int ei0, int ei1, int ei2) { CellCoord.X = x; CellCoord.Y = y; CellCoord.Z = z; E0 = ei0; E1 = ei1; E2 = ei2; } } public static byte VULF = 1 << 0; public static byte VULB = 1 << 1; public static byte VLLB = 1 << 2; public static byte VLLF = 1 << 3; public static byte VURF = 1 << 4; public static byte VURB = 1 << 5; public static byte VLRB = 1 << 6; public static byte VLRF = 1 << 7; //以上为体素为实点的位标记 public static Int16Triple[] PointIndexToPointDelta = new Int16Triple[8] { new Int16Triple(0, 1, 1 ), new Int16Triple(0, 1, 0 ), new Int16Triple(0, 0, 0 ), new Int16Triple(0, 0, 1 ), new Int16Triple(1, 1, 1 ), new Int16Triple(1, 1, 0 ), new Int16Triple(1, 0, 0 ), new Int16Triple(1, 0, 1 ) };//体元内每个体素相对基准体素坐标的偏移 public static byte[] PointIndexToFlag = new byte[8] { VULF, VULB, VLLB, VLLF, VURF, VURB, VLRB, VLRF };//每个体素对应的位标记 public static int[,] EdgeIndexToEdgeVertexIndex = new int[12, 2] { {0,1}, {1,2}, {2,3},{3,0}, {4,5},{5,6}, {6,7}, {7,4}, {0,4}, {1,5}, {2,6}, {3,7} };//每个边对应的两顶点体素的索引 public static Int16Quad[] CubeEdgeMapTable = new Int16Quad[12] { new Int16Quad(0,1,0,1), new Int16Quad(0,0,0,0), new Int16Quad(0,0,0,1), new Int16Quad(0,0,1,0), new Int16Quad(1,1,0,1), new Int16Quad(1,0,0,0), new Int16Quad(1,0,0,1), new Int16Quad(1,0,1,0), new Int16Quad(0,1,1,2), new Int16Quad(0,1,0,2), new Int16Quad(0,0,0,2), new Int16Quad(0,0,1,2), }; protected BitMap3d bmp; protected int d; protected int h; protected int w; protected int wh; public MCProcessor(BitMap3d bitmap) { this.bmp = bitmap; } public Mesh GenerateSurface() { d = bmp.depth; h = bmp.height; w = bmp.width; wh = w * h; Int16Triple[] temp = new Int16Triple[8]; Mesh m = new Mesh(); OriginalTriangle[] tempTriangles = new OriginalTriangle[6]; MCTriangleNetHashTable hash = new MCTriangleNetHashTable(0, 0, w, h); for (int k = 0; k <= d - 1; k++) { for (int j = 0; j <= h - 1; j++) { for (int i = 0; i <= w - 1; i++) { byte value = GetConfig(temp, bmp, i, j, k); if (value == 0 || value == 255) continue; int tcount = ExtractTriangles(temp, value, i, j, k, tempTriangles); for (int tindex = 0; tindex < tcount; tindex++) { MergeTriangleIntoMesh(m, hash, tempTriangles[tindex]); } } } hash.IncreaseIndex(); } return m; } private byte GetConfig(Int16Triple[] temp, BitMap3d flagsMap, int indexInWidth, int indexInHeight, int indexInDepth) { byte value = 0; for (int pi = 0; pi < 8; pi++) { temp[pi].X = indexInWidth + PointIndexToPointDelta[pi].X; temp[pi].Y = indexInHeight + PointIndexToPointDelta[pi].Y; temp[pi].Z = indexInDepth + PointIndexToPointDelta[pi].Z; if (temp[pi].X < w && temp[pi].X >= 0 && temp[pi].Y < h && temp[pi].Y >= 0 && temp[pi].Z < d && temp[pi].Z >= 0 && IsInsideIsoSurface(temp[pi].X,temp[pi].Y,temp[pi].Z)) { value |= PointIndexToFlag[pi]; } } return value; } private int ExtractTriangles(Int16Triple[] temp, byte value, int indexInWidth, int indexInHeight, int indexInDepth, OriginalTriangle[] result) { int tcount = 0; if (MCTable.TriTable[value, 0] != -1) { int index = 0; while (MCTable.TriTable[value, index] != -1) { int e0index = MCTable.TriTable[value, index]; int e1index = MCTable.TriTable[value, index + 1]; int e2index = MCTable.TriTable[value, index + 2]; result[tcount] = new OriginalTriangle(indexInWidth, indexInHeight, indexInDepth,e0index,e1index,e2index); tcount++; index += 3; } } return tcount; } private void MergeTriangleIntoMesh(Mesh mesh, MCTriangleNetHashTable hashMap, OriginalTriangle ot) { int e0i= CubeEdgeMapTable[ot.E0].D; int p0x = ot.CellCoord.X + CubeEdgeMapTable[ot.E0].A; int p0y = ot.CellCoord.Y + CubeEdgeMapTable[ot.E0].B; int p0z = ot.CellCoord.Z + CubeEdgeMapTable[ot.E0].C; int e1i = CubeEdgeMapTable[ot.E1].D; int p1x = ot.CellCoord.X + CubeEdgeMapTable[ot.E1].A; int p1y = ot.CellCoord.Y + CubeEdgeMapTable[ot.E1].B; int p1z = ot.CellCoord.Z + CubeEdgeMapTable[ot.E1].C; int e2i = CubeEdgeMapTable[ot.E2].D; int p2x = ot.CellCoord.X + CubeEdgeMapTable[ot.E2].A; int p2y = ot.CellCoord.Y + CubeEdgeMapTable[ot.E2].B; int p2z = ot.CellCoord.Z + CubeEdgeMapTable[ot.E2].C; int p0i; int p1i; int p2i; int index = 0; index = hashMap.GetHashValue(p0x, p0y, p0z,e0i); if (index == -1) { Point3d interp = GetIntersetedPoint(ot.CellCoord.X, ot.CellCoord.Y, ot.CellCoord.Z, ot.E0); p0i = mesh.AddVertex(interp); hashMap.SetHashValue(p0x, p0y, p0z,e0i,p0i); } else { p0i = index; } index = hashMap.GetHashValue(p1x, p1y, p1z,e1i); if (index == -1) { Point3d interp = GetIntersetedPoint(ot.CellCoord.X, ot.CellCoord.Y, ot.CellCoord.Z, ot.E1); p1i = mesh.AddVertex(interp); hashMap.SetHashValue(p1x, p1y, p1z,e1i ,p1i); } else { p1i = index; } index = hashMap.GetHashValue(p2x, p2y, p2z,e2i); if (index == -1) { Point3d interp = GetIntersetedPoint(ot.CellCoord.X, ot.CellCoord.Y, ot.CellCoord.Z, ot.E2); p2i = mesh.AddVertex(interp); hashMap.SetHashValue(p2x, p2y, p2z,e2i ,p2i); } else { p2i = index; } Triangle t = new Triangle(p0i, p1i, p2i); mesh.AddFace(t); } protected virtual Point3d GetIntersetedPoint(int cx,int cy,int cz, int ei) { int p0i = EdgeIndexToEdgeVertexIndex[ei, 0]; int p1i = EdgeIndexToEdgeVertexIndex[ei, 1]; int p0X = cx+PointIndexToPointDelta[p0i].X; int p0Y = cy + PointIndexToPointDelta[p0i].Y; int p0Z = cz + PointIndexToPointDelta[p0i].Z; int p1X = cx + PointIndexToPointDelta[p1i].X; int p1Y = cy + PointIndexToPointDelta[p1i].Y; int p1Z = cz + PointIndexToPointDelta[p1i].Z; return new Point3d((p0X+p1X)/2.0f,(p0Y+p1Y)/2.0f,(p0Z+p1Z)/2.0f); } protected virtual bool IsInsideIsoSurface(int x,int y,int z) { return bmp.data[x+ w * y + wh * z] == BitMap3d.WHITE; } protected virtual bool InRange(int x, int y, int z) { if (x < w && x >= 0 && y < h && y >= 0 && z < d && z >= 0) { return true; } return false; } }
效率对比
使用用Phantom数据,对其抽取MC/SMC等值面,其中MC/SMC算法分别采用堆砌二维数组与本文的设计,其效率对比如下表所示。
|
算法 |
MC(堆砌) |
MC(本文) |
SMC(堆砌) |
SMC(本文) |
|
时间 |
10211ms |
6772ms |
8235ms |
5104ms |
工程下载
采用此方法实现的算法代码可在如下地址下载:
MC:https://github.com/chnhideyoshi/OctreeBaseSimplifiedMarchingCubes/tree/master/MarchingCubes
SMC:https://github.com/chnhideyoshi/OctreeBaseSimplifiedMarchingCubes/tree/master/SimplifiedMarchingCubes
博主注:在项目:https://github.com/chnhideyoshi/OctreeBaseSimplifiedMarchingCubes增加了C++版本的MC/SMC算法实现。具体项目目录为:
MC(C++):https://github.com/chnhideyoshi/OctreeBaseSimplifiedMarchingCubes/tree/master/MarchingCubesCp
爬网的太疯狂了,转载本文要注明出处啊:http://www.cnblogs.com/chnhideyoshi/

 浙公网安备 33010602011771号
浙公网安备 33010602011771号