
PCF8591 AD/DA转换基于51
#include <reg52.h> #include<intrins.h> //内部有_nop_(); //IIC模拟时序实现 //注意:SCL为高电平时变化SDA数据是起始或者终止信号;所以若不是起始或者终止信号,需要在SCL为低电平时变化SDA数据 sbit SDA = P2^0; sbit SCL = P2^1; sbit LED = P2^3; sbit wei = P2^6; sbit duan = P2^7; unsigned char num = 0; unsigned char TEMP=0,flag=0; unsigned char code table[] = "i get value: --" ; unsigned char code duan_table[] = {0x3F, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x6f, 0x77, 0x7c, 0x39, 0x5e, 0x79, 0x71}; //void delay(unsigned char t) //{ // unsigned char i,j; // for(i = t; i > 0; i --) // for(j = 110; j > 0; j --); //} void T1_Init() { EA = 1;//打开总中断 // ET1 = 1;//T1定时器中断打开 ,不屏蔽掉串口会一直发 ,像flag==1里出不来了 TMOD = 0x20;//8位初值自动重装 TH1 = 0xfd; TL1 = 0xfd; TR1 = 1; //启动定时器 } void SCON_Init() { SM0 = 0; SM1 = 1;//10bit REN = 1;//允许串行口接收数据 ES = 1; } void delay3us() { _nop_(); _nop_(); _nop_(); } void delayms(unsigned int t) { unsigned int i,j; for(i = t; i > 0; i --) { for(j = 250; j > 0; j --); } } void start() { SDA = 1;//scl=1写在SDA=1后面 delay3us(); delay3us(); SCL = 1;////scl=1写在SDA=1后面,若是不这么做的话,万一SDA=1之前SDA是0就变成命令信号了 delay3us();//SCL = 1需延时至少4.7us delay3us(); SDA = 0; delay3us();//SDA = 0;SCL = 1需延时至少4us delay3us(); SCL = 0;//释放SCL delay3us(); } void stop() { SDA = 0; delay3us(); delay3us(); SCL = 1; delay3us();//SCL = 1;SDA = 0需要至少延时4.7us delay3us(); SDA = 1; delay3us();//SCL = 1;SDA = 1需要至少延时4.7us delay3us(); // SDA = 0; //这一句如果写了就是在SCL=1时变化了SDA } void ack() { SCL = 0; SDA = 1; delay3us(); SDA = 0; //SDA先清零,让SCL = 1,等最少4us,看SDA数据线是否被接收设备拉低了,拉低表示接收设备应答了 delay3us();//如果不写上面的SDA = 0;万一是SDA = 1,下面SCL = 1,之后等待SDA被接收设备拉低,会出现,SCL=1时SDA拉低了,变成了起始信号了 SCL = 1; //SCL=1,等接收设备拉低SDA表示应答 delay3us(); delay3us(); SCL = 0;//释放总线 delay3us(); delay3us(); SDA = 1;//[可写可不写该句X]必须要写,这里不明白 } void noack() { SCL = 0; SDA = 0; delay3us(); SDA = 1; delay3us(); SCL = 1; delay3us(); delay3us(); SCL = 0;//释放总线 delay3us(); delay3us(); SDA = 0;//可写可不写 } //字节写入 void write_byte(unsigned char byte) { unsigned char tmp_i,tmp_byte; tmp_byte = byte; //启动信号发出后,便发出控制字,看start函数里SDA,SCL最后状态下笔 for(tmp_i = 0; tmp_i < 8; tmp_i ++) { SCL = 0;//START函数里末尾也是SCL=0,应该可以不用写,但是循环所以建议写 //scl=0 时可以变化SDA数据 tmp_byte <<= 1;//高位先移,移出数据会进入PSW寄存器CY内 // delay3us(); SDA = CY; delay3us(); SCL = 1;//数据停止变化,并保持一段时间 delay3us(); delay3us(); } SCL = 0;//释放总线 delay3us(); } //字节读取 unsigned char read_byte() { unsigned char i,byte; for(i = 0; i < 8; i ++) { SCL = 0; //应答之后读取数据,看ack内部最后SDA,SCL状态 byte <<= 1;//高位先移出,高位就先移入。ack函数内部,SCL是低电平的,这里循环所以再写一下 // delay3us(); byte |= SDA; //scl = 0从SDA获取数据,这里处理可能需要延时,防止时间太短 delay3us(); SCL = 1; //数据停止变化,并保持一段时间 delay3us(); delay3us(); // byte |= SDA; //SCL为高并延时了至少4.7us,SDA稳定了,再处理数据亦可 } SCL = 0;//释放总线 delay3us(); return byte; } //unsigned char read_byte() //{ // unsigned char i,byte; // for(i = 0; i < 8; i ++) // { // SCL = 1; //数据停止变化,并保持一段时间 // delay3us(); // delay3us(); // byte <<= 1;//高位先移出,高位就先移入。ack函数内部,SCL是低电平的,这里循环所以再写一下 // byte |= SDA; //SCL为高并延时了至少4.7us,SDA稳定了,再处理数据亦可 // // SCL = 0; //应答之后读取数据,看ack内部最后SDA,SCL状态 // delay3us(); //// byte |= SDA; //scl = 0从SDA获取数据,这里处理可能需要延时,防止时间太短 //// delay3us(); // // // } // SCL = 0;//释放总线 // // delay3us(); // return byte; //} //单字节写入数据到指定地址 void write_data(unsigned char add,unsigned char val) { start(); write_byte(0xae); ack(); write_byte(add); ack(); write_byte(val); ack(); stop(); } //单字节读取 unsigned char read_data(unsigned char add) { unsigned char val=0; start(); write_byte(0xae); ack(); write_byte(add); ack(); start(); write_byte(0xaf); ack(); val = read_byte(); noack(); stop(); return val; } //将数字值转换成模拟量输出函数 void DAC_convert(unsigned char val) { start(); write_byte(0x90); ack(); write_byte(0x40); ack(); write_byte(val); ack(); stop(); // write_byte(0x01); // ack(); } //模数转换函数 unsigned char ADC_convert() { unsigned char temp_val; start(); write_byte(0x90); ack(); write_byte(0x00); ack(); start(); write_byte(0x91); ack(); temp_val = read_byte(); ack(); temp_val = read_byte(); noack(); stop(); return temp_val; } void display() { unsigned char numv=0; numv = ADC_convert(); wei = 1; P0 = 0xfe; wei = 0; duan = 1; P0 = duan_table[numv/100]; duan = 0; delayms(1); P0 = 0XFF; wei = 1; P0 = 0xfd; wei = 0; duan = 1; P0 = duan_table[(numv%100)/10]; duan = 0; delayms(1); P0 = 0XFF; wei = 1; P0 = 0xfb; wei = 0; duan = 1; P0 = duan_table[(numv%100)%10]; duan = 0; delayms(1); P0 = 0XFF; } void main() { T1_Init(); SCON_Init(); while(1) { display(); if(flag == 1) { ES = 0; for(num = 0; num < 15; num ++) { SBUF = table[num]; while(!TI); TI = 0; } SBUF = ADC_convert(); while(!TI); TI = 0; flag = 0; ES = 1; } } } void usart1() interrupt 4 { RI = 0; // TEMP = SBUF;//接收到数据存储到TEMP中 flag = 1; }
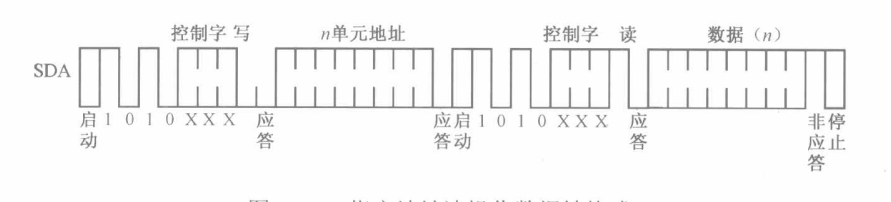
AD采样时序(类似):
并将转换发送到串口进行观察

