互联网络
互联网络
互联网络是一种由开关元件按照一定的拓扑结构和控制方式构成的网络,用来实现计算机系统中结点之间的相互连接。
- 结点:处理器、存储模块或其它设备。
- 在拓扑上,互连网络为输入结点到输出结点之间的一组互连或映像。
SIMD计算机和MIMD计算机的关键组成部分。3大要素:互连结构,开关元件,控制方式。
互连函数
互连函数
变量\(x\):输入(设\(x = 0 , 1 , ... , N - 1\))
函数\(f(x)\):输出
通过数学表达式建立输入端号与输出端号的连接关系。即在互连函数\(f\)的作用下,输入端\(x\)连接到输出端\(f(x)\)。
- 互连函数反映了网络输入数组和输出数组之间对应的置换关系或排列关系。有时也称为置换函数或排列函数。
- 互连函数\(f(x)\)有时可以采用循环表示,即\((x_0 , x_1 , ... , x_{j - 1})\)表示:\(f(x_0) = x_1 , f(x_1) = x_2 , ... , f(x_{j - 1}) = x_0\)。\(j\)称为该循环的长度。
- 设\(n = log_2N\),则可以用\(n\)位二进制来表示\(N\)个输入端和输出端的二进制地址,互连函数表示为:\(f(x_{n - 1} x_{n - 2} ... x_1x_0)\)
几种基本的互连函数
恒等函数
定义:实现同号输入端和输出端之间的连接。
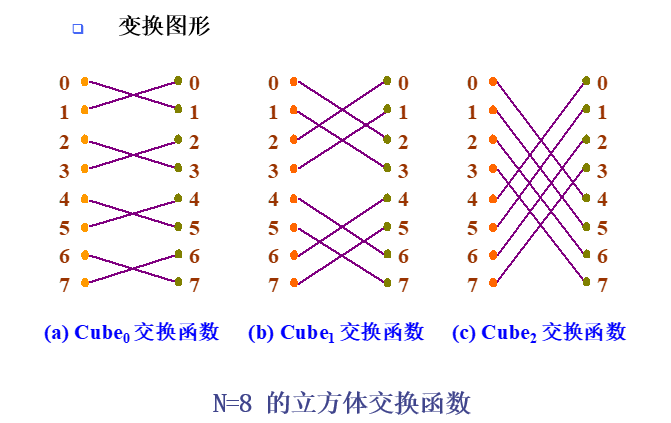
交换函数
定义:实现二进制地址编码中第\(k\)位互反的输入端与输出端之间的连接。
-
主要用于构造立方体互连网络和各种超立方体互连网络。
-
它共有\(n = log_2N\)种互连函数。\(N\)为结点个数。
-
当\(N = 8\)时,\(n = 3\),可以得到常用的立方体互连函数:
\[\begin{align} Cube_0(x_2x_1x_0) &= x_2x_1\bar{x}_0\\ Cube_1(x_2x_1x_0) &= x_2\bar{x}_1x_0\\ Cube_2(x_2x_1x_0) &= \bar{x}_2x_1x_0\\ \end{align} \] -
交换图形:
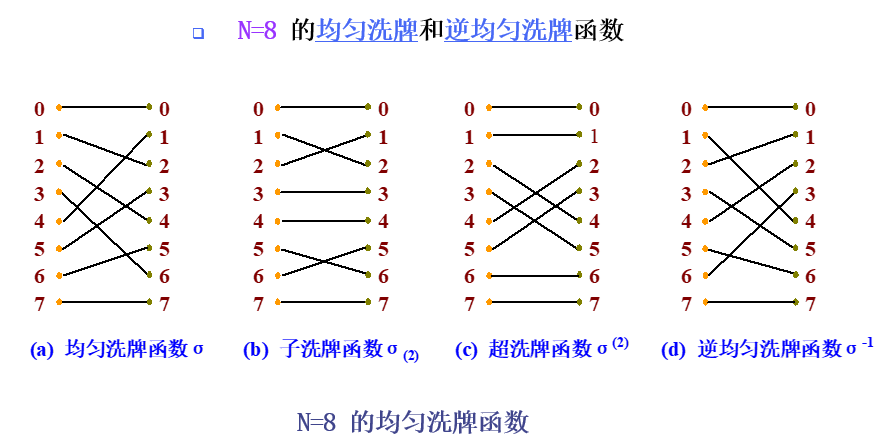
均匀洗牌函数
定义:将输入端分成数目相等的两半,前一半和后一半按类似均匀混洗扑克牌的方式交叉地连接到输出端(输出端相当于混洗的结果)。也称为混洗函数(置换)。
函数关系:
即把输入端的二进制编号循环左移一位。
- 互连函数(设为\(s\))的第\(k\)个子函数:把\(s\)作用于输入端的二进制编号的低\(k\)位。
- 互连函数(设为\(s\))的低\(k\)个超函数:把\(s\)作用于输入端的二进制编号的高\(k\)位。
例如,对于均匀洗牌函数
第\(k\)个子函数:
即把输入端的二进制编号中的低\(k\)位循环左移一位。
第\(k\)个超函数:
即把输入端的二进制编号中的高\(k\)位循环左移一位。
有以下等式:
-
对于任意一种函数\(f(x)\),如果存在\(g(x)\),使得\(f(x) \times g(x) = I(x)\),则称\(g(x)\)是\(f(x)\)的逆函数,记作\(f^{-1}(x)\)且有\(f^{-1}(x) = g(x)\)。
-
逆均匀洗牌函数:将输入端的二进制编号循环右移一位而得到所连接的输出端编号。
-
互连函数:
\[\sigma^{-1}(x_{n - 1}x_{n - 2}...x_1x_0) = x_0x_{n - 1}x_{n - 2}...x_1 \]逆均匀洗牌是均匀洗牌的逆函数。
-
当\(N = 8\)时,有:
\[\begin{align} \sigma (x_2x_1x_0) &= x_1x_0x_2\\ \sigma _{(2)}(x_2x_1x_0) &= x_2x_0x_1\\ \sigma ^{(2)}(x_2x_1x_0) &= x_1x_2x_0\\ \sigma ^{-1}(x_2x_1x_0) &= x_0x_2x_1\\ \end{align} \] -
\(N = 8\)时的均匀洗牌和逆均匀洗牌函数:
碟式函数
定义:把输入端的二进制编号的最高位与最低位互换位置,便得到了输出端的编号。
-
第\(k\)个子函数
\[\beta_{(k)}(x_{n - 1}x_{n - 2}...x_{k}|x_{k-1}x_{k-2}...x_1x_0) = x_{n - 1}x_{n - 2}...x_{k}|x_{0}x_{k-2}...x_1x_{k - 1} \]把输入端的二进制编号的低\(k\)位中的最高位与最低位互换。
-
第\(k\)个超函数
\[\beta^{(k)}(x_{n - 1}x_{n - 2}...x_{n - k + 1}x_{n - k}|x_{n - k-1}...x_1x_0) = x_{n - k}x_{n - 2}...x_{n - k + 1}x_{n - 1}|x_{n - k-1}...x_1x_0 \]把输入端的二进制编号的高\(k\)位中的最高位与最低位互换。
-
下列等式成立:
\[\beta^{(n)}(x) = \beta^{(n)}(x) = \beta(x)\\ \beta^{(1)}(x) = \beta^{(1)}(x) = \beta(x)\\ \] -
当\(N = 8\)时,有:
-
碟式变换与交换变换的多级组合可作为构成立方多级网络的基础。
-
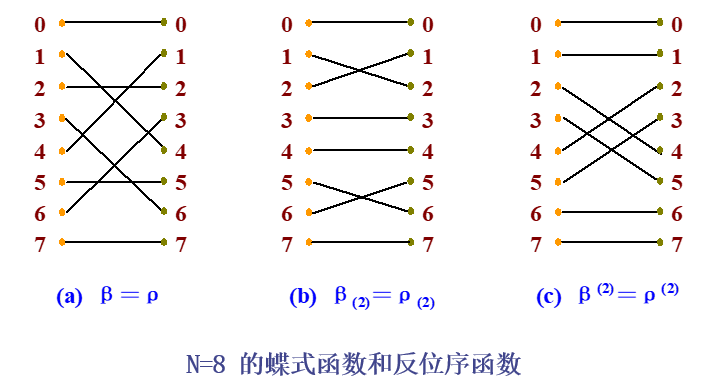
反位序函数
定义:将输入端二进制编号的位序颠倒过来求得相应输出端的编号。
互连函数:
- 第\(k\)个子函数
即把输入端和二进制编号的低\(k\)位中各位的次序颠倒过来。
- 第\(k\)个超函数
即把输入端的二进制编号的高\(k\)位中各位的次序颠倒过来。
- 下列等式成立:
- 当\(N = 8\)时,有:
移数函数
定义:将各输入端都错开一定的位置(模\(N\))后连接到输出端。
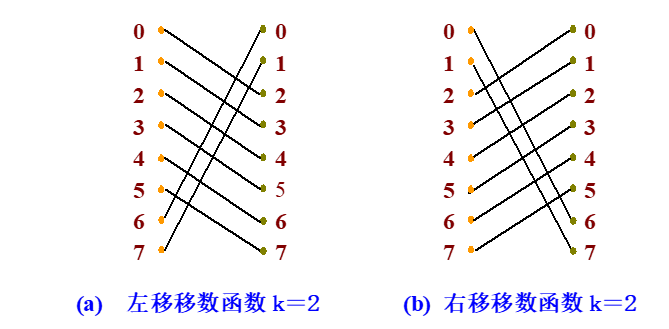
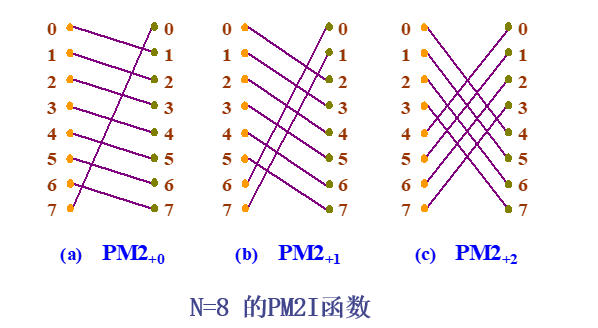
PM2I函数
\(P\)和\(M\)分别表示加和减,\(2I\)表示\(2^i\)。该函数又称为加减\(2^i\)函数。
定义:一种移数函数,将各输入端都错开一定的位置(模\(N\))后连接到输出端。
互连函数:
其中\(0 \leq x \leq N - 1 , 0 \leq i \leq n - 1 , n = log_2N\),\(N\)为结点数。
\(PM2I\)互连网络共有\(2n\)个互连函数。
当\(N = 8\)时,有\(6\)个PM2I函数:
- \(PM2I_{+0}\; :\;(0\;1\;2\;3\;4\;5\;6\;7)\)
- \(PM2I_{-0}\;:\; (7\;6\;5\;4\;3\;2\;1\;0)\)
- \(PM2I_{+1}\;:\;(0\;2\;4\;6)\;(1\;3\;5\;7)\)
- \(PM2I_{-1}\;:\;(6\;4\;2\;0)\;(7\;5\;3\;1)\)
- \(PM2I_{+2}\;:\;(0\;4)\;(1\;5)\;(2\;6)\;(3\;7)\)
- \(PM2I_{-2}\;:\;(4\;0)\;(5\;1)\;(6\;2)\;(7\;3)\)
-
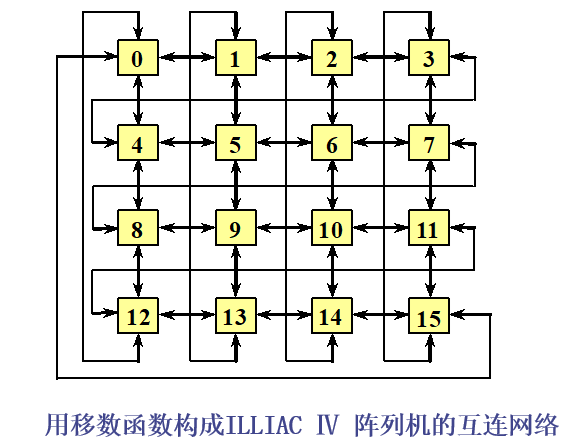
阵列计算机
ILLIAC IV采用\(PM2I_{\pm0}\)和\(PM2I_{\pm\frac{n}{2}}\)构成其互连网络,实现各处理单元之间的上下左右互连。
互连网络的结构参数与性能指标
互连网络的结构参数
网络通常是用有向边或无向边连接有限个结点的图来表示。
互连网络的主要特性参数有:
- 网络规模\(N\):网络中结点的个数。表示该网络所能连接的部件的数量。
- 结点度\(d\):与结点相连的边数(通道数),包括入度和出度。
- 进入结点的边数叫入度
- 从结点出来的边数叫出度
- 结点距离:对于网络中的任意两个结点,从一个结点出发到另一个结点终止所需要跨越的边数的最小值。
- 网络直径\(D\):网络中任意两个结点之间距离的最大值。网络直径应当尽可能地小。
- 等分宽度\(b\):把由\(N\)个结点构成的网络切成结点数相同(\(\frac{N}{2}\))的两半,在各种切法中,沿切口边数的最小值。
- 线等分宽度:\(B = b \times w\)。其中\(w\)表示通道宽度,用位表示;该参数主要反映了网络最大流量。
- 对称性:从任何结点看到的拓扑结构都是相同的网络称为对称网络。对称网络比较容易实现,编程也比较容易。
互连网络性能指标
评估互连网络性能的两个基本指标:时延和带宽
通信时延
指从源结点到目的结点传送一条消息所需的总时间,它由以下4部分构成:
- 软件开销:在源结点和目的结点用于收发消息的软件所需的执行时间。主要取决于两端端结点处理消息的软件内核。
- 通道时延:通过通道传送消息所花的时间。通路时延 = 消息长度 / 通道带宽;通常由瓶颈链路的通道带宽决定。
- 选路时延:消息在传送路径上所需的一系列选路决策所需的时间开销。与传送路径上的结点数成正比。
- 竞争时延:多个消息同时在网络中传送时,会发生争用网络资源的冲突。为避免或解决争用冲突所需的时间就是竞争时延。很难预测,它取决于网络的传输状态。
网络时延
通道时延与选路时延的和。它是由网络硬件特征决定的,与程序行为和网络传输状态无关。
端口带宽
对于互连网络中的任意一个端口来说,其端口带宽是指单位时间内从该端口传送到其他端口的最大信息量。
- 在对称网络中,端口带宽与端口位置无关。网络的端口带宽与各端口的端口带宽相同。
- 非对称网络的端口带宽则是指所有端口带宽的最小值。
聚集带宽
网络从一半结点到另一半结点,单位时间内能够传送的最大信息量。
例如:HPS是一种对称网络,网络规模\(N\)的上限为512。端口带宽40MB/s,HPS的聚集带宽为:\(\frac{20MB/s \times 512}{2} = 10.24GB/s\)。
等分带宽
与等分宽度对应的切平面中,所有边合起来单位时间所能传送的最大信息量。
静态互连网络
互连网络通常可以分为两大类:
- 静态互连网络:各结点之间有固定的连接通路,且在运行中不能改变的网络。
- 动态互连网络:由交换开关构成、可按运行程序的要求动态地改变连接状态的网络。
下面介绍几种静态互连网络:(其中\(N\)表示结点个数)
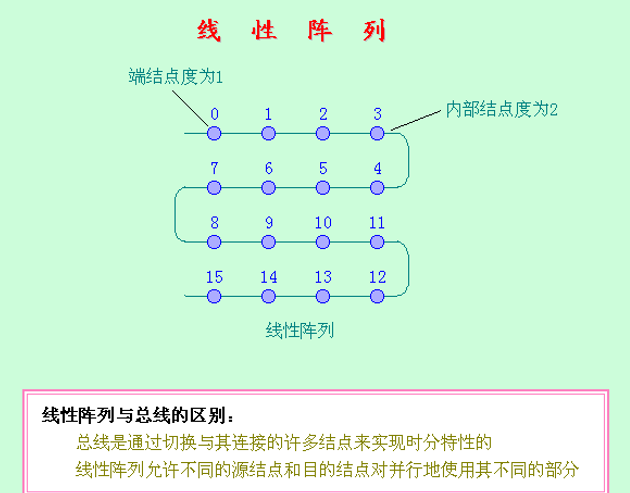
线性阵列
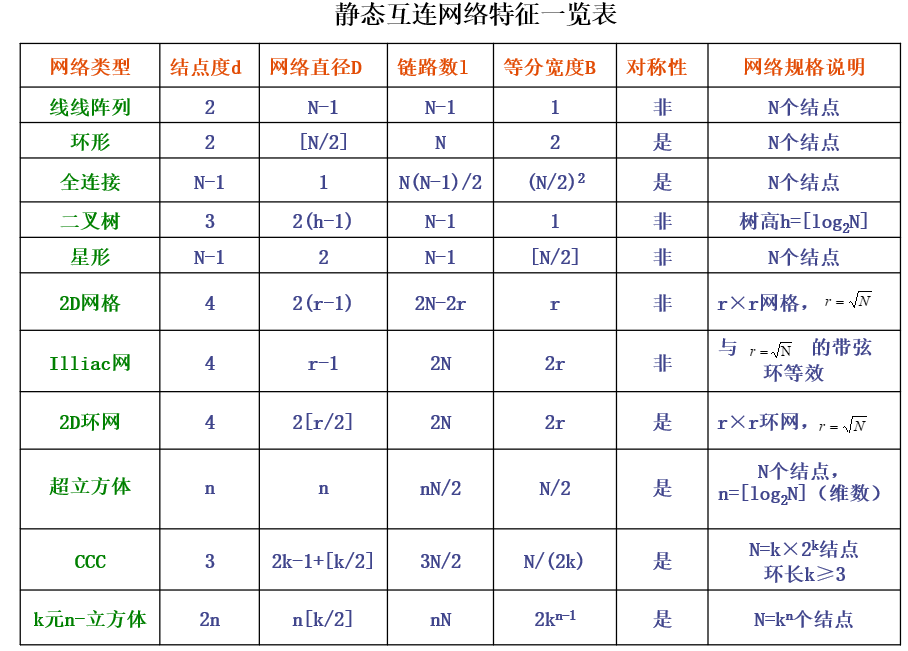
一种一维的线性网络,其中\(N\)个结点用\(N - 1\)个链路连成一行。端结点的度为1;其余结点的度为2;直径为N - 1;等分宽度b = 1。
环和带弦环
环:用一条附加链路将线性阵列的两个端点连接起来而构成。可以单向工作,也可以双向工作。
- 对称
- 结点的度:
2 - 双向环的直径:\(\frac{N}{2}\)
- 单向环的直径:\(N\)
- 环的等分宽度:\(b = 2\)。
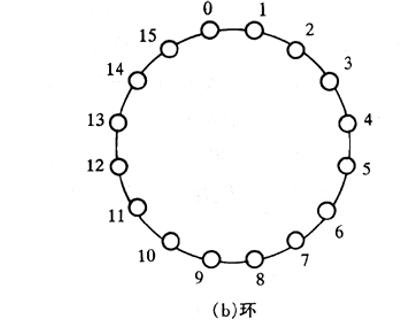
带弦环:增加的链路越多,结点度越高,网络直径就越小。
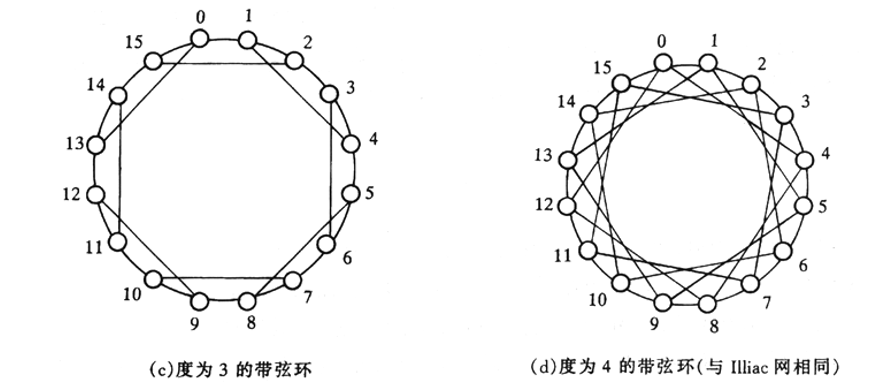
全连接网络:网络中任意两个结点之间都有通道
- 结点度:
15 - 直径最短,为
1。 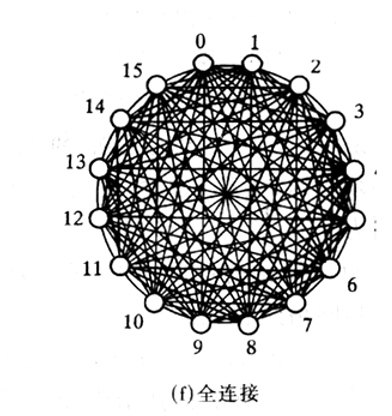
循环移数网络:通过在环上每个结点到所有与其距离为\(2\)的整数幂的结点之间都增加一条附加链而构成。
-
结点度:
7 -
直径:
2 -
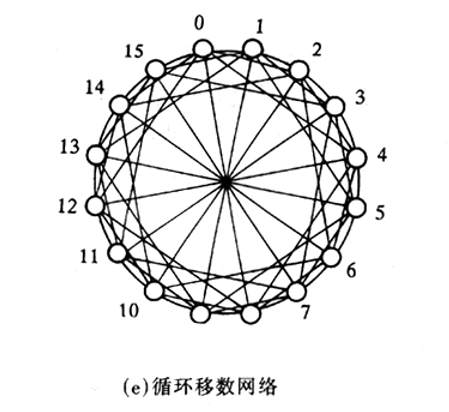
-
一般地,如果\(|j - i| = 2^r(r = 0 , 1 , 2 , ... , n - 1 , n = log_2N)\),则结点\(i\)与结点\(j\)连接。
-
结点度为:\(2n - 1\)
-
直径为\(\frac{n}{2}\)
-
网络规模为:\(N = 2^n\)。
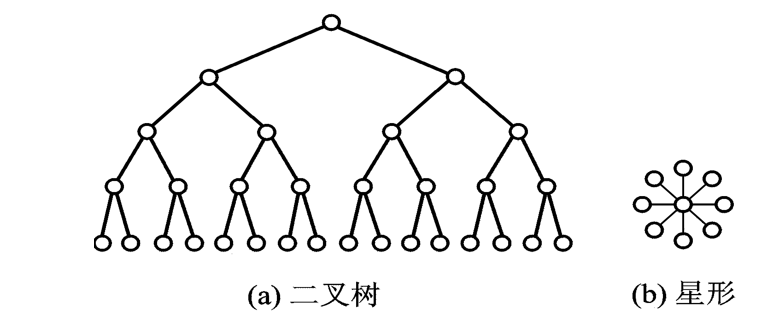
树形和星形
- 一棵\(5\)层\(31\)个结点的二叉树,一般来说,一棵\(k\)层完全平衡的二叉树有\(N = 2^k - 1\)个结点。
- 最大结点度:\(3\)
- 直径:\(2(k - 1)\)
- 等分宽度:\(b = 1\)
- 星形:
- 结点度较高,为\(N - 1\)。
- 直径较小,为\(2\),等分宽度\(b = \lfloor\frac{N}{2} \rfloor\)
- 可靠性比较差,只要中心结点出现故障,整个系统就会瘫痪。
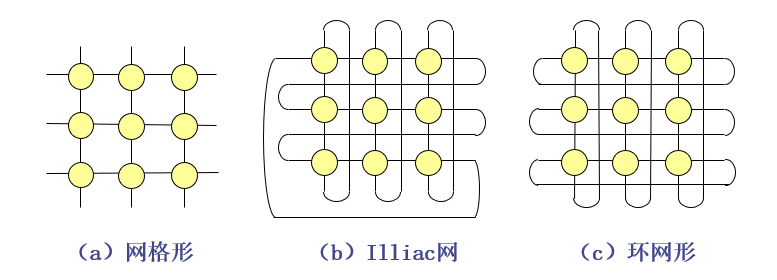
网格行和环网形
网格形:
- 一个\(3 \times 3\)的网格形网络
- 一个规模为\(N = n \times n\)的\(2\)维网格形网络
- 内部结点的度\(d = 4\)
- 边结点的度\(d = 3\)
- 角结点的度\(d = 2\)
- 网络直径\(D = 2(n - 1)\)
- 等分宽度\(b = n\)
- 一个由\(N = n^k\)个结点构成的\(k\)维网格形网络(每维\(n\)个结点)的内部结点度\(d = 2k\),网络直径为\(D = k(n - 1)\)。
ILLIAC网络:
- 名称来源于采用了这种网络的
ILLIAC IV计算机 - 把\(2\)维网格形网络的每一列的两个端点连接起来,再把每一行的尾结点与下一行的头结点连接起来,并把最后一行的尾结点与第一行的头结点连接起来。
- 一个规模为\(n \times n\)的
ILLIAC网络:- 所有结点的度\(d = 4\)
- 网络直径\(D= n - 1\)。
ILLIAC网络的直径只有纯网格行网络直径的一半。 - 等分宽度:\(2n\)。
环网形:
- 可看作是直径更短的另一种网络。
- 把\(2\)维网格行网络的每一行的两个端结点连接起来,把每一列的两个端点也连接起来。
- 将环形和网格形组合在一起,并能向高维扩展。
- 一个\(n \times n\)的环网形网络:
- 结点度:\(d = 4\)
- 网络直径:\(D = 2 \times \lfloor\frac{n}{2} \rfloor\)
- 等分宽度:\(b = 2n\)
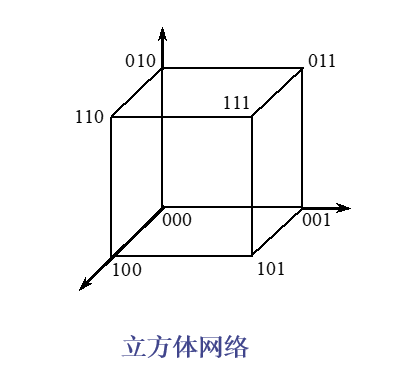
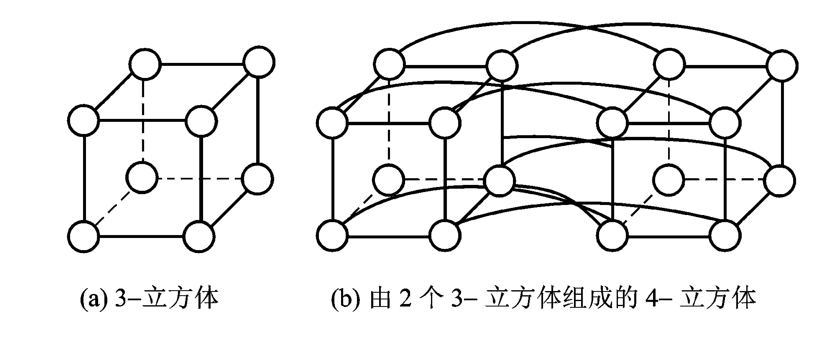
超立方体
- 一种二元\(n\)-立方体结构
- 一般来说,一个二元\(n\)-立方体由\(N = 2^n\)个结点组成,它们分布在\(n\)维上,每维有两个结点。
- 为实现一个\(n\)-立方体,只要把两个\((n - 1)\)立方体中相对应的结点用链路连接起来即可。共需要\(2^{n - 1}\)条链路。
- \(n\)-立方体中结点的度都是\(n\),直径也是\(n\),等分宽度为:\(b = \frac{N}{2}\)。
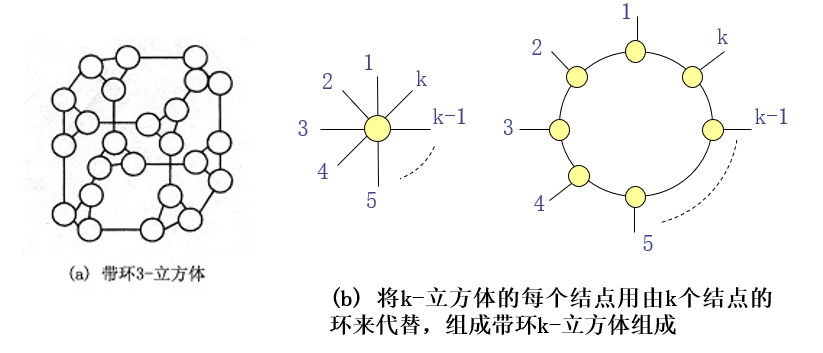
带环立方体(简称3-CCC)
- 把\(3\)-立方体的每个结点换成一个由\(3\)个结点构成的环而形成的。
- 带环\(k\)-立方体,简称\(k-CCC\):
- \(k\)立方体的变形,它是通过用\(k\)个结点构成的环取代\(k\)-立方体中的每一个结点而形成的
- 网络规模\(N = k\times 2^k\)
- 网络直径\(D = 2k - 1 + \lfloor \frac{k}{2}\rfloor\)。比\(k\)-立方体的直径大一倍。
- 等分宽度\(b = \frac{N}{2k}\)
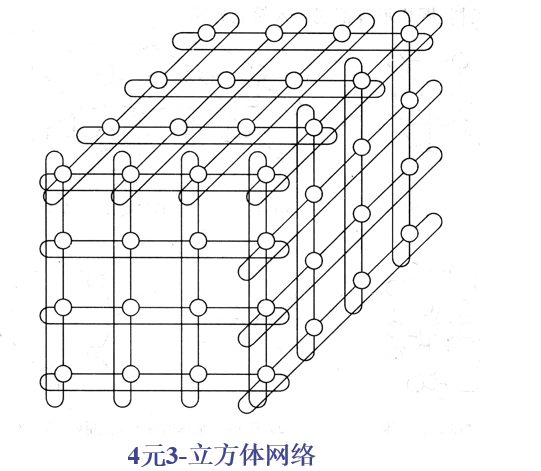
k元n-立方体网络
- 环形、网格、环网形、二元\(n\)-立方体(超立方体)和\(Omega\)网络都是\(k\)元\(n\)-立方体网络系列的拓扑同构体。
- 在\(k\)元\(n\)-立方体网络中,参数\(n\)是立方体的维数,\(k\)是基数,即每一维上的结点个数。\(N = k^n\)。
- \(k\)元\(n\)-立方体的结点可以用基数为\(k\)的\(n\)位地址\(A =a_1a_2…a_n\)来表示。
- 通常把低维\(k\)元\(n\)-立方体称为环网,而把高维\(k\)元\(n\)-立方体称为超立方体。
一览表
动态互连网络
总线网络
由一组导线和插座构成,经常被用来实现计算机系统中处理机模块、存储模块和外围设备等之间的互连。
- 每一次总线只能用于一个源(主部件)到一个或多个目的(从部件)之间的数据传送。
- 多个功能模块之间的争用总线或时分总线。
- 特点:结构简单、实现成本低、带宽较窄
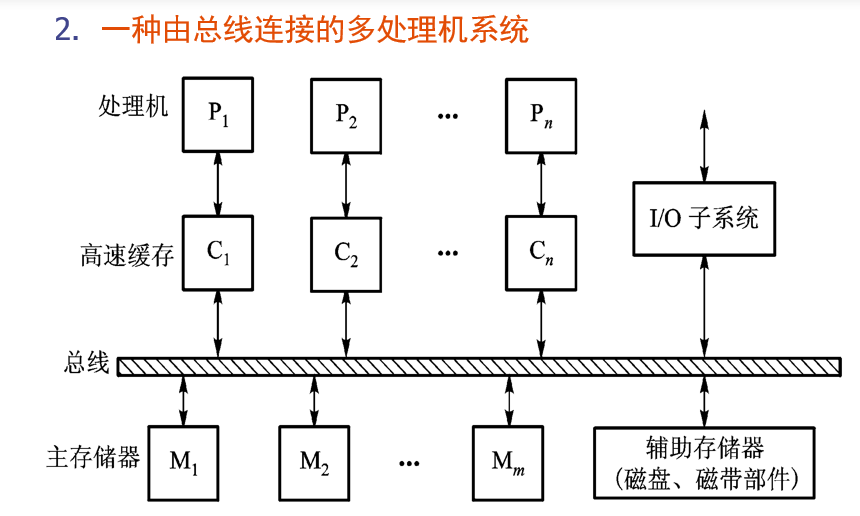
- 系统总线在处理机、
IO子系统、主存储器以及辅助存储设备之间提供了一条公用通路。 - 系统总线通常设置在印刷电路板底板上。处理器板、存储器板和设备接口板都通过插座或电缆插入底板。
解决总线带宽较窄问题:采用多总线或多层次的总线
-
多总线是设置多条总线
有两种做法:
- 为不同的功能设置专门的总线。
- 重复设置相同功能的总线。
-
多层次的总线是按层次的架构设置速度不同的总线,使得不同速度的模块有比较适合的总线连接。
交叉开关网络
单级开关网络
- 交叉点开关能在对偶(源、目的)之间形成动态连接,同时实现多个对偶之间的无阻塞连接。
- 带宽和互连特性最好。
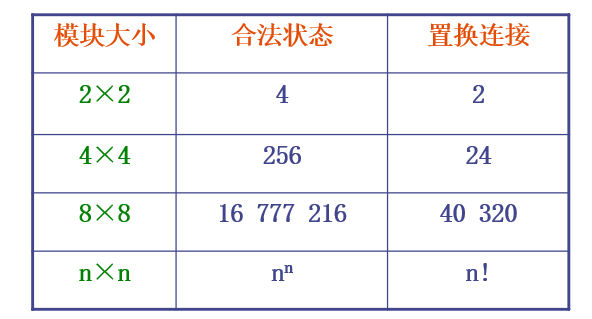
- 一个\(n \times n\)的交叉开关网络,可以无阻塞地实现\(n!\)种置换。
- 对一个\(n \times n\)的交叉开关网络来说,需要\(n^2\)套交叉点开关以及大量的连线。当\(n\)很大时,交叉开关网络所需要的硬件数量非常巨大。
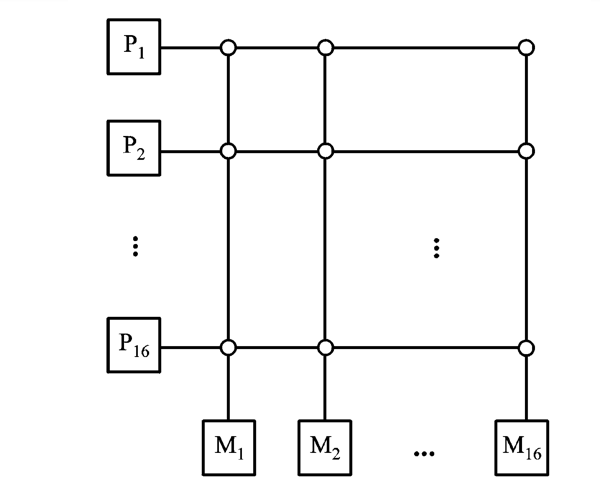
C.mmp多处理机的互连结构
- 用\(16 \times 16\)的交叉开关网络把\(16\)台
PDP-11处理机与\(16\)个存储模块连在一起。 - 最多可同时实现\(16\)台处理机对\(16\)个不同存储模块的并行访问:
- 每个存储模块一次只能满足一台处理机的请求。
- 当多个请求要同时访问同一存储模块时,交叉开关就必须分解所发生的冲突,每一列只能接通一个交叉点开关。
- 为了支持并行或交叉存储器访问,可以在同一行中接通几个交叉点开关。
多级互连网络
多级互连网络的构成
-
MIMD和SIMD计算机都采用多级互连网络MIN。 -
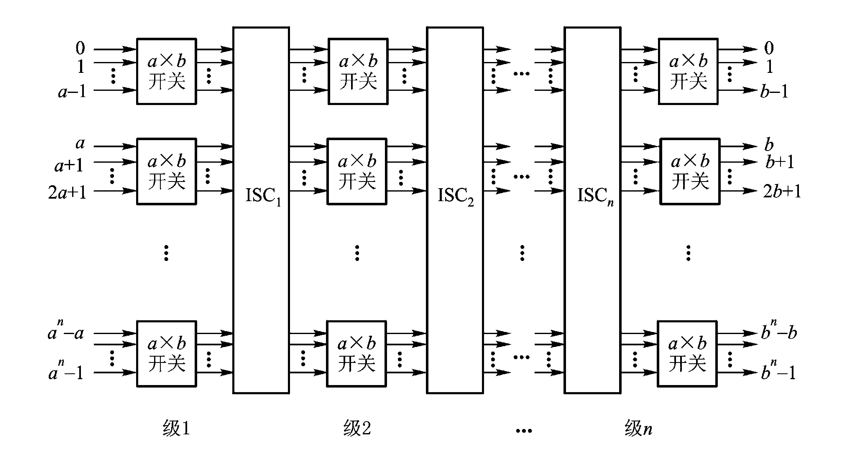
一种通用的多级互连网络:
- 由\(a \times b\)开关模块和级间连接构成的通过多级互连网络结构。
- 每一级都用了多个\(a \times b\)开关;\(a\)个输入和\(b\)个输出;在理论上,\(a\)和\(b\)不一定相等,然而实际上\(a\)和\(b\)经常选为\(2\)的整数幂次。
- 相邻各级开关之间都有固定的级间连接。
-
-
几种常用的开关模块
-
最简单的开关模块:\(2 \times 2\)开关
-
各种多级互连网络的区别在于所用开关模块、控制方式和级间互连模式的不同。
- 控制方式:对各个开关模块进行控制的方式。
- 级控制:每一级的所有开关只用一个控制信号控制,只能同时处于同一种状态。
- 单元控制:每一个开关都有一个独立的控制信号,可各自处于不同的状态。
- 部分级控制:第\(i\)级的所有开关分别用\(i + 1\)个信号控制,\(0 \leq i \leq n - 1\),\(n\)为级数。
- 常用的级间互连模式:均匀洗牌、碟式、多路洗牌、纵横交叉、立方体连接等。
- 控制方式:对各个开关模块进行控制的方式。
多级立方体网络
-
多级立方体网络包括
STARAN网络和间接二进制\(n\)立方体网络等。- 两者仅在控制方式上不同,在其他方面都是一样的。
- 都采用二功能(直送和交换)的\(2 \times 2\)开关。
- 当第\(i\)级交换开关处于交换状态时,实现的是\(Cube_i\)互连函数。
-
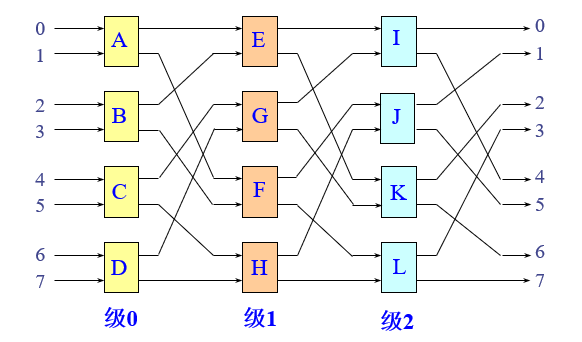
一个\(N\)输入的多级立方体网络有\(log_2N\)级,每级用\(\frac{N}{2}\)个\(2 \times 2\)开关模块,共需要\(log_2N \times \frac{N}{2}\)个开关。
-
一个\(8\)个入端的多级立方体网络
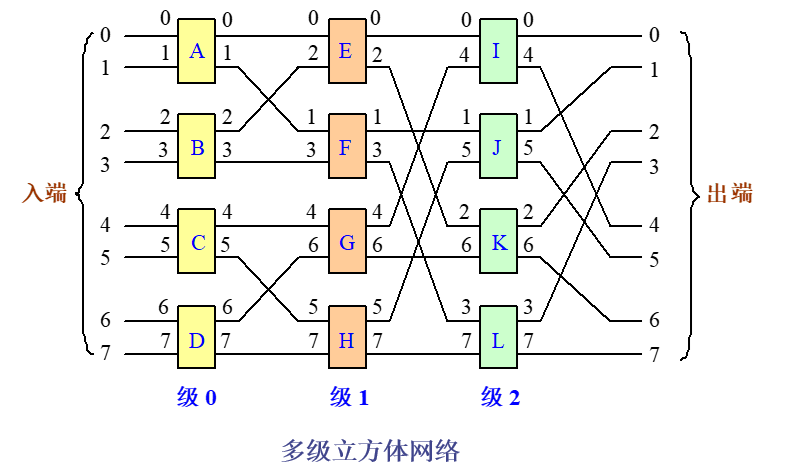
例如,第\(0\)级开关处于交换,其他处于直送,$0 \to 1 ,1\to 0 , 2\to 3 , 3 \to 2 , ... , \(对应的是\)Cube_0$。
-
STARAN网络采用级控制和部分级控制。- 采用级控制时,所实现的是交换功能。
- 采用部分级控制时,则能实现移数功能。
-
间接二进制\(n\)立方体网络则采用单元控制,具有更大的灵活性。
-
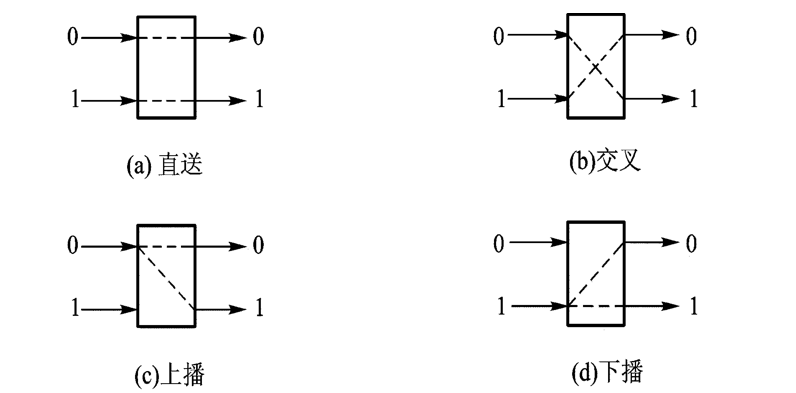
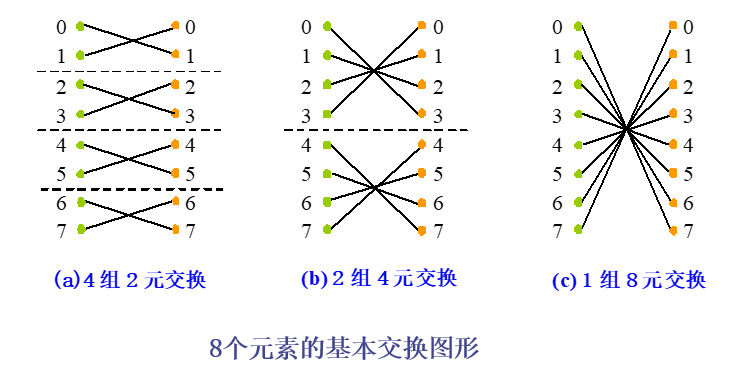
交换:将有序的一组元素头尾对称地进行交换。
例如,对于由\(8\)个元素构成的组,各种基本交换的图形:
-
\(3\)级
STARAN网络在各种级控制信号的情况下,所实现的入出端连接以及所实现的交换函数和功能。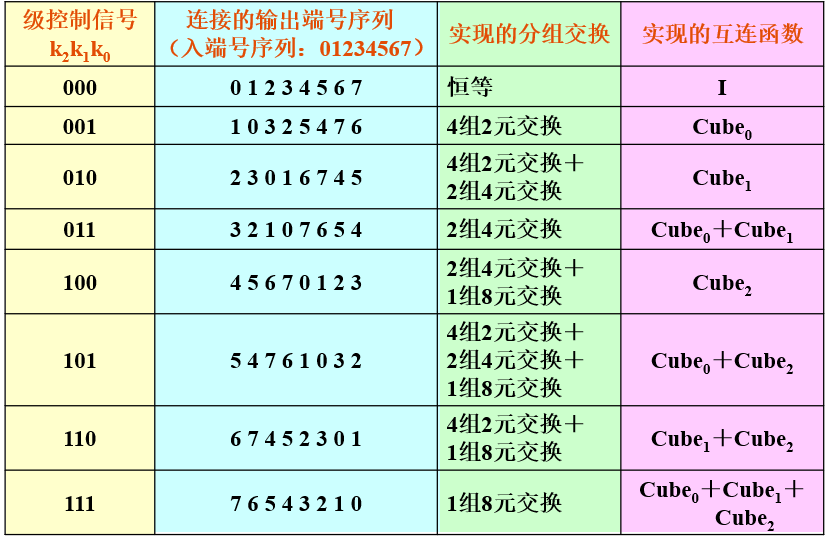
其中:
- \(k_2k_1k_0\):控制信号,\(k_i(i = 0 , 1 , 2)\)为第\(i\)级的级控制信号。
- 从表中可以看出:下面的\(4\)行中每一行所实现的功能可以从级控制信号为其反码的一行中所实现的功能加上\(1\)组\(8\)元变换来获得。
-
当
STARAN网络用作移数网络时,采用部分级控制,控制信号的分组和控制结果。
Omega网络
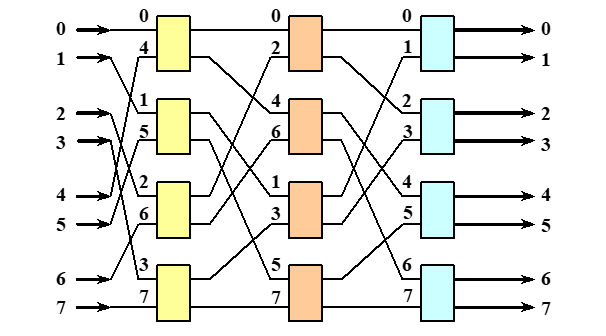
-
一个\(8 \times 8\)的
Omega网络- 每级由\(4\)个\(4\)功能的\(2 \times 2\)开关构成
- 级间互连采用均匀洗牌连接方式
-
一个\(16 \times 16\)
Omega网络: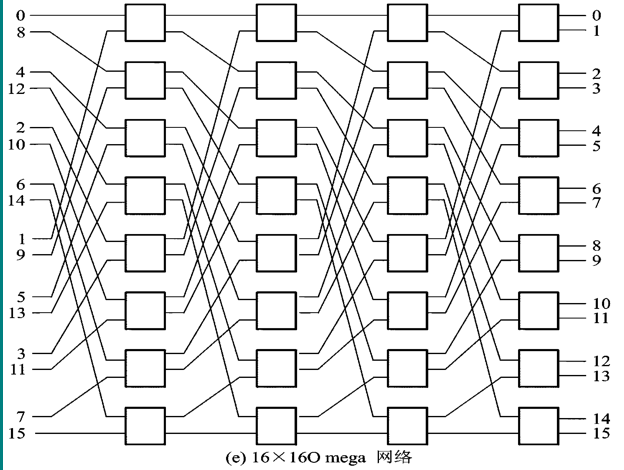
-
一个\(N\)输入的
Omega网络:- 有\(log_2N\)级,每级用\(\frac{N}{2}\)个\(2 \times 2\)开关模块,共需要\(\frac{Nlog_2N}{2}\)个开关。
- 每个开关模块均采用单元控制方式。
- 不同的开关状态组合可实现各种置换、广播或从输入到输出的其它连接。
-
\(N = 8\)的多级立方体互连网络的另一种画法:
动态互连网络的比较

消息传递机制
当源结点和目的结点之间没有直接的连接时,消息需要经过中间的结点进行传递。寻径就是用来实现这种传递的通信方法和算法,有的称之为路由。
消息寻径方案
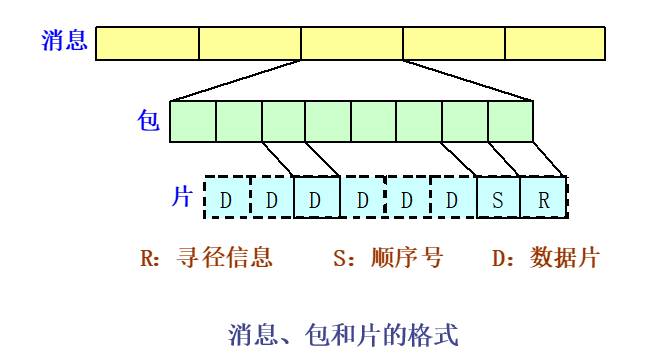
消息的格式:
-
消息:结点之间进行通信的逻辑单位
- 由若干个包组成;
- 包的长度是固定的,一条消息中所包含的包的个数是可变的,消息的长度是不定长的。
-
包:包含寻径所需目的地址的基本单位
- 一条消息中的各个包都依次被分配一个序号。以便这些包到达目的结点后能重新组装出消息。
- 包可以进一步分成一些更小的固定长度的单位,称为片。
- 寻径信息和包序列号形成头片,其余的是数据片。
- 包的长度主要是由寻径方案和网络的具体实现所决定的。典型的长度是\(64 \sim 512\)位不等。
- 片的长度经常是受网络大小的影响。
四种寻径方式
- 线路交换:在线路交换方式下,在传递一个信息之前,需要先建立一条从源结点到目的结点的物理通路,然后再传递信息。
- 传输时延\(T = \frac{L + L_t \times (D + 1)}{B}\);其中\(L\)表示信息包的长度(位数);\(L_t\)表示建立路径所需的小信息包的长度;\(D\)表示经过的中间结点个数;\(B\)表示带宽。
- 优点:传输带宽较大,平均传输时延较小,而且使用的缓冲区小。适合于具有动态和突发性的大规模并行处理数据的传送。
- 缺点:需要频繁地建立源结点到目的结点的物理通路,时间开销会很大。
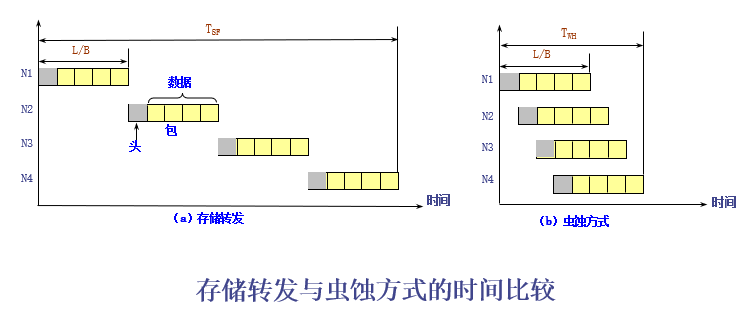
- 存储转发:最简单的分组交换方式。
- 包是信息传递的基本单位。包从源结点经过一系列中间结点到达目的结点。
- 要求:所经过的每个中间结点都要设置一个包缓冲器,用于保存所传递的包,当一个包到达某个中间结点时,该结点先把这个包全部存储起来,然后在出口链路可用,而且下一个结点的包缓冲器也可用的情况下,传递给下一个结点。
- 网络的时延与源和目的地之间的距离(跳数)成正比\(T_{SF} = \frac{L(D+1)}{B}\)。
- 缺点:包缓冲区大,不利于
VLSI实现;网络时延大,与结点距离成正比。
- 虚拟直通:对存储转发方式的一种改进,减少了网络时延。
- 基本思想:没有必要等到信息包全部放入缓冲器后再作路由选择,只要接收到用作寻径的包头,就可做出判断。
- 如果结点的输出链路空闲,信息包可以不必存储在该结点的缓冲器中,而是立即传送到下一个结点。
- 如果整条链路都空闲,包就可以立即直达目的结点。
- 在输出链路不空闲时,要用缓冲器进行存储。
- 通信时延:\(T = \frac{L + L_{h}\times (D + 1)}{B} \approx \frac{L}{B}\);其中\(L_h\)表示信息包寻径头部的长度,一般来说\(L \gg L_h \times (D + 1)\),所以\(T \approx \frac{L}{B}\)。
- 当出现寻径阻塞时,虚拟直通方式需要将整个信息包全部存储在寻径结点中,要求每个结点都有足够大的缓冲区。
- 虫蚀方式:把信息包切割成更小的单位——片;而且使信息包中各片的传送按流水方式进行。
-
可以减少结点中缓冲器的容量,缩短传送延迟时间。
-
在新型的多计算机系统中得到了广泛的应用。
-
处理的最小信息单位是片。当一个结点把头片送到下一个结点后,那么接下来就可以把后面的各个片也依次送出。
-
一个结点一旦开始传送一个包中的头片后,这个结点就必须等待这个包的所有片都送出去后,才能传送其他包。不同包的片不能混合在一起传送。
-
与虚拟直通的不同之处:
- 当输出通路忙时,结点是把一个片存储到缓冲器中。
- 由于片的大小比包小很多,所以能有效地减少缓冲器的容量,使得它易于用
VLSI实现。
-
通信时延:\(T_{WH} = T_f \times D + \frac{L}{B} = \frac{L + L_f \times D}{B} \approx \frac{L}{B}\);其中\(L_f\)表示片的长度;\(T_f\)表示片经过一个结点所需的时间,\(L \gg L_f \times D\)。
-
-
优点:每个结点的缓冲器较小;有较小的网络传输延迟;通道共享性好,利用率高;易于实现选播和广播通信模式。
-
缺点:当消息的一片被阻塞时,整个消息的所有片都将被阻塞在所在结点,占用了结点资源。
-
死锁与虚拟直通
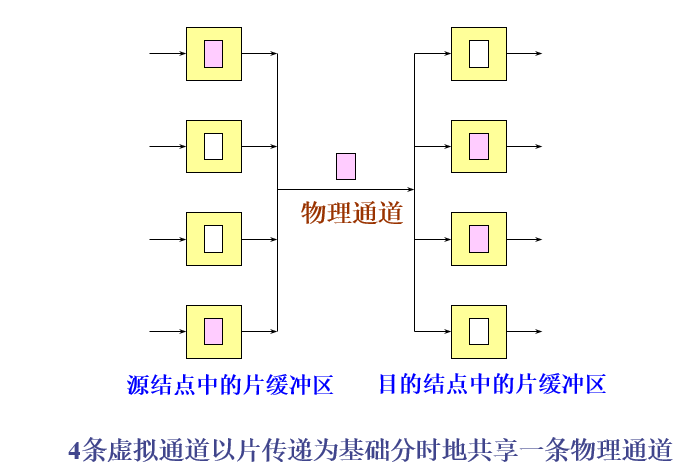
虚拟通道:两个结点间的逻辑连接,它由源结点的片缓冲区、结点间的物理通道以及接收结点的片缓冲区组成。
- \(4\)条虚拟通道共享一条物理通道:
- 源结点和接收结点各有\(4\)个片缓冲区。
- 当物理通道分配给某对缓冲区时,这一对的源缓冲区和接收缓冲区就形成了一条虚拟通道。
- 物理通道是由所有的虚拟通道分时地共享。
- 虚拟通道也可以用双向通道实现。把两条单向通道组合在一起可以构成一条双向通道。增加了利用率,使通道的带宽加倍。
避免死锁
缓冲区或通道上的循环等待会引起死锁。
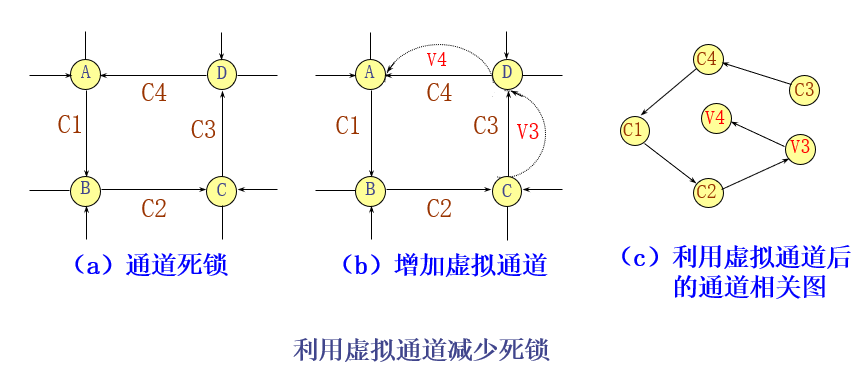
例如:
- 图
(a):出现循环的通道相关而产生死锁; - 图
(b):利用虚拟通道方法可以避免这个死锁,可以增加两条虚拟通道\(V_3 , V_4\)。 - 图
(c):避免了死锁; - 增加虚拟通道可能会使每个请求可用的有效通道带宽降低。为此,当实现数目很大的虚拟通道时需要用高速的多路选择开关。
流控制策略
包冲突的解决:
-
为了通过通道在两个相邻结点之间传送一个片,要同时具备\(3\)个条件:
- 源缓冲区已存有该片;
- 通道已分配好;
- 接收缓冲区准备接收该片。
-
当两个包到达同一结点时,它们可能都在请求同一个接收缓冲器或者同一个输出通道,这时必须对两个问题进行仲裁:
- 把通道分配给那个包?
- 如何处理被通道拒绝的包?
-
\(4\)种解决方案:
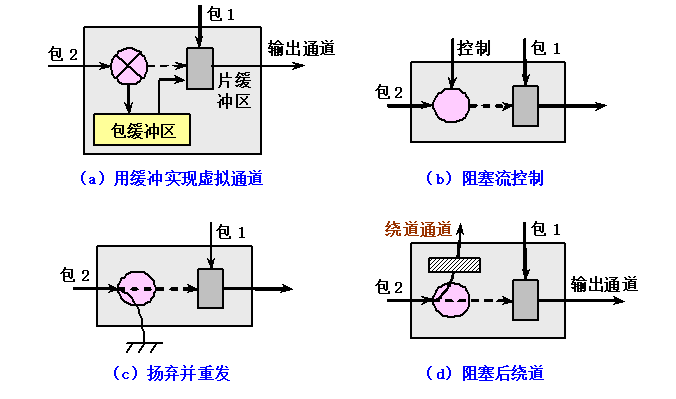
- 把第二个包暂存在缓冲区:优点是不会浪费已经分配了的资源,但它要求结点中有一个足够大的缓冲器来存放整个信息包。
- 阻塞第二个包
- 丢弃第二个包:有可能会造成严重的资源浪费,而且要求重新进行被丢弃包的传输与确认。
- 绕道:在包寻径方面提供了更多的灵活性,但为了到达目的结点,可能要花费超过实际需要的通道资源,造成浪费。
确定性寻径和自适应寻径
确定性寻径:通信路径完全由源结点地址和目的地址来决定,也就是说,寻径路径是预先唯一地确定好了的,而与网络的状况无关。
自适应寻径:通信的通路每一次都要根据资源或者网络的情况来选择。可以避开拥挤的或者有故障的结点,使网络的利用率得到改进。
两种确定性寻径算法:
- 都是建立在维序概念之上的
- 对于一个多维网来说,维序寻径要求对后继通道的选择是按照各维的顺序来进行的。
- 对于二维的网格网络来说,这种寻径方法被称为\(X-Y\)寻径。先沿\(X\)维方向进行寻径,然后再沿\(Y\)方向寻找路径。
- 对于超立方体来说,这种寻径方法被称为\(E-cube\)寻径。
二维网格网络的\(X-Y\)寻径:
- 任意一个源结点:\(s = (x_1 , y_1)\)
- 任意一个目的结点:\(d = (x_2 , y_2)\)
- 从\(s\)出发,先沿\(X\)轴方向前进,直到找到\(d\)所在的列\(x_2\);
- 然后再沿\(Y\)轴方向前进,直到找到目标结点\((x_2 , y_2)\)。
考虑一个由\(N = 2^n\)个结点构成的\(n\)立方体,,每个结点的编号是形为\(b = b_{n - 1}b_{n - 2}...b_1b_0\)的二进制编码。
设源结点:\(s = s_{n - 1}s_{n - 2}...s_1s_0\);目的结点:\(d = d_{n - 1}d_{n - 2}...d_1d_0\)。现在要确定一条从\(s\)到\(d\)的步数最少的路径。将这个\(n\)立方体的各维表示成\(i = 1 , 2 , ... , n\),其中第\(i\)维对应于结点地址中的第\(i - 1\)位。
设\(v = v_{n - 1}v_{n - 2}...v_1v_0\)是路径中的任一结点,路径可以根据以下算法唯一地确定:
- 计算方向位\(r_i = s_{i - 1} \oplus d_{i - 1}\),其中$ i = 1 , 2 , ... , n$。
- 令\(v = s , i = 1\),反复执行以下步骤:
- 如果\(r_i = 1\)则从当前结点\(v\)寻径到下一结点;否则就跳过这一步。
- \(i \gets i + 1\)。如果\(i \leq n\),则转上一步,否则退出。
选播和广播寻径算法
多计算机网络中会出现以下\(4\)中通信模式:
- 单播:对应于一对一的通信情况,即一个源结点发送消息到一个目的结点。
- 选播:对应于一到多的通信情况,即一个源结点发送同一消息到多个目的结点。
- 广播:对应于一到全体的通信情况,即一个源结点发送同一消息到全部结点。
- 会议:对应于多到多的通信情况。
通道流量和通信时延是常用的两个参数:
- 通道流量可用传输有关消息所使用的通道数来表示。
- 通信时延则用包的最大传输时间来表示。
优化的寻径网络应能以最小流量和最小时延实现相关的通信模式。
作者:cherish.
出处:https://home.cnblogs.com/u/cherish-/
本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号