手眼标定传统方法
一、对机器人手眼协调关系的研究可以追溯到20世纪70年代。MIT和Stanford联合研制了一个手眼系统,该系统是由摄像机和机械手构成的机器人视觉系统。手眼系统根据
构型可以分为:
(1) Eye-in-Hand 摄像机安装在机械手末端并跟随其一起运动。
(2) Eye-to-Hand 摄像机安装在机械臂外部的固定位置。
对于Eye-in-Hand,摄像机坐标系相对机器人世界坐标系的位姿总是变化的,而相对末端的位姿是恒定。对于Eye-to-Hand而言,则正相反。因此,对于前者,手眼标定求
取的是摄像机(眼)相对于机器人末端坐标系(手)的位姿。
二、一般描述法
机器人末端处于不同位姿下,对摄像机相对于靶标的外参进行标定,根据摄像机相对于靶标的外参和机器人末端的位姿,计算摄像机相对于机器人末端的外参。
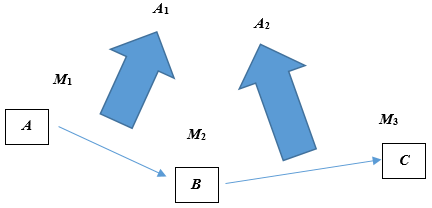
三、坐标系说明
物体坐标系O,摄像机移动前后两个位置的坐标系为C1和C2,机械手末端移动前后两个位置的坐标系为E1和E2。下图是一个参考系关系图。

箭头方向从参考系指向被描述系
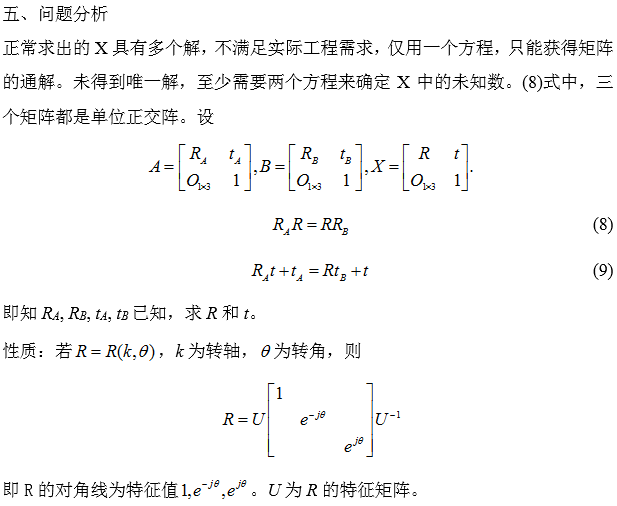
四、手眼标定基本问题
根据物体相对摄像机位姿,可得

其中,位姿变换矩阵的左上标是参考系,右上标是被描述系。
根据摄像机成像模型
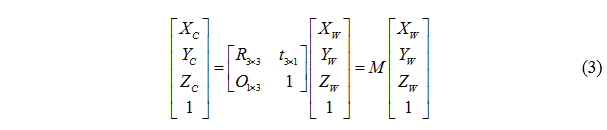
M是外参矩阵。实际上,外参矩阵是世界坐标系相对于摄像机坐标系的位姿。



人之为学有难易乎

 浙公网安备 33010602011771号
浙公网安备 33010602011771号