solidworks 导出urdf 在python ikpy库 使用注意点
如下图所示:
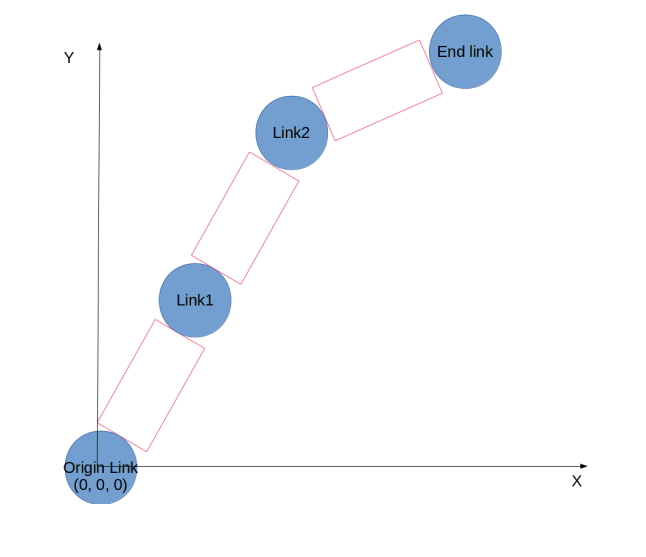
ikpy 定义的 link == ros urdf 定义的joint;ikpy 定义的 joint == ros urdf 定义的link
且在创建 solidworks 3D模型的时候 始终需要 如下图中的origin link 和 endlink,导出urdf文件后 才可以使用ikpy 中的 from_urdf_file 使用。
使用solidworks export to URDF 之前注意只需要定义好旋转轴即可,坐标系由solidworks 自己计算生成。
如果使用自动生成参考坐标系,在下次生成之前需要删除定义的坐标系,避免干扰。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号