ROS 导入示例程序并建立工程运行
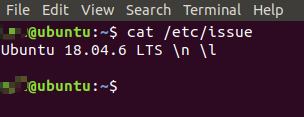
ubuntu版本号查询:Ubuntu 18.04.6 LTS
ROS 安装版本(melodic):
参考:
cn/melodic/Installation/Ubuntu - ROS Wiki
ROS 开发环境安装:RoboWare Studio
参考:
机器人操作系统ROS-Roboware Studio教程(ROS melodic) - 知乎 (zhihu.com)
linux 下安装 ROS 教程程序(新建立一个功能包路径,在SRC 路径下下载)
git clone git://github.com/ros/ros_tutorials.git
进入如下路径:
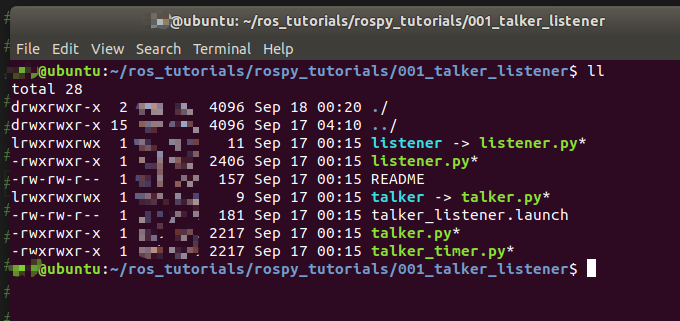
ros_tutorials/rospy_tutorials/001_talker_listener,可以看到如下文件分布
在RoboWare Studio 创建工程,按照上面教程,添加对应文件目录。
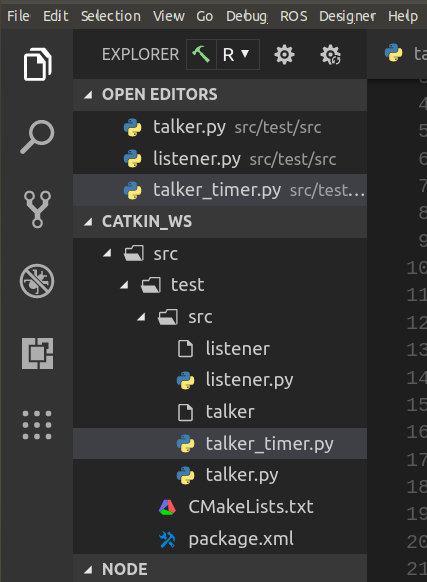
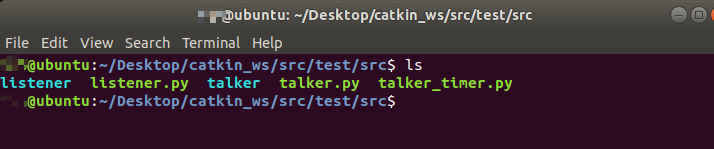
如下将下载的教程文件复制到该目录
执行: catkin_make 编译工程
分别打开三个终端 每个终端执行 source ./devel/setup.bash 加载环境变量
然后
终端1:
roscore 执行ROS 核心进程 节点管理器
终端2:
rosrun test talker 执行发布节点
终端3:
rosrun test listener 执行订阅节点
(注意使用需要修改python 文件的可执行权限)
修改py文件增加执行权限 chmod +x xxx.py 将对应python 文件创建符号连接 ln -s xxx.py xxx
只是测试过程做记录使用,写得匆忙,有误的地方多包涵。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号