
IMU和GPS ekf融合定位 从matlab到c++代码实现 基于位姿状态方程,松耦合
IMU和GPS ekf融合定位 从matlab到c++代码实现
基于位姿状态方程,松耦合
文档原创且详细
这段代码是一个数据融合程序,主要用于将GPS和IMU(惯性测量单元)数据进行融合,以估计车辆的位置和姿态。下面我将对代码进行详细的解释和分析。
首先,代码使用了MATLAB的一些函数和工具箱来进行数据处理和仿真。代码中的`clear`函数用于清除MATLAB的工作空间。
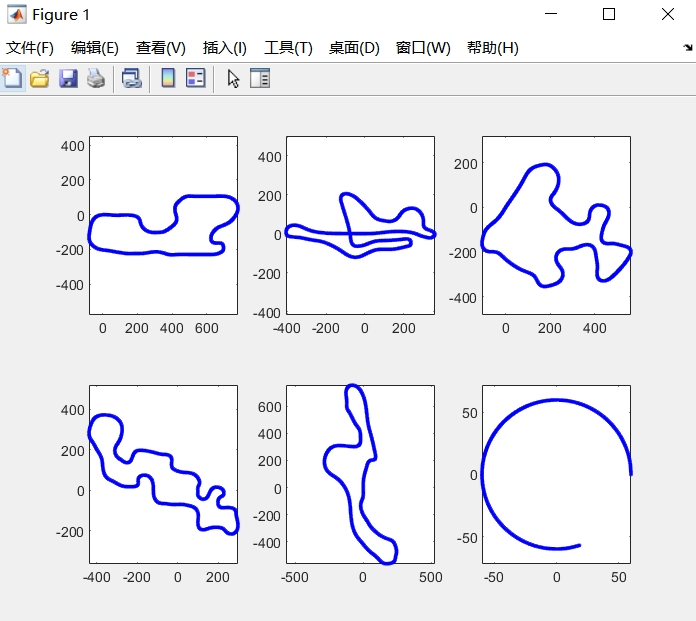
接下来,代码定义了一些变量和参数,如`imuFs`和`gpsFs`分别表示IMU和GPS的数据采样频率,`imuSamplesPerGPS`表示每个GPS数据点对应的IMU数据点数量。然后,代码加载了一个名为`trajData0.mat`的数据文件,其中包含了车辆的轨迹数据。
接下来,代码创建了一个名为`gndFusion`的数据融合对象,使用了`insfilterNonholonomic`函数进行初始化。该对象用于融合IMU和GPS数据,并估计车辆的位置和姿态。通过设置不同的参数,可以调整融合算法的性能和精度。
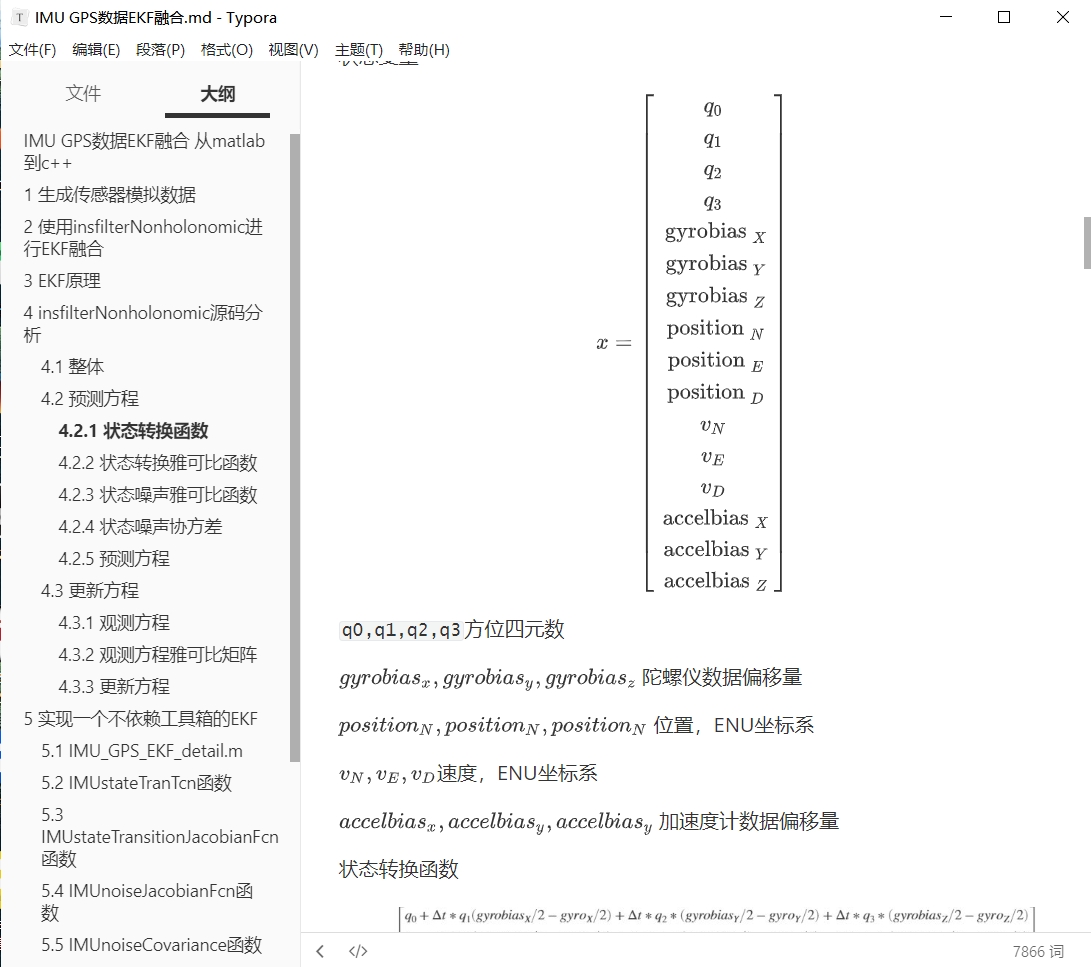
然后,代码初始化了融合对象的状态和噪声参数。状态包括姿态、速度和位置等信息,噪声参数用于模拟传感器的测量误差。此外,代码还定义了一些其他变量,如`Rpos`表示GPS水平位置的精度,`estPositions`用于保存估计的位置数据。
接下来,代码使用一个循环来处理IMU和GPS数据。循环中的每个迭代都包括以下步骤:
1. 预测:根据当前的IMU数据,使用`predict`函数对状态进行预测,得到车辆的姿态和位置估计。
2. 更新:根据当前的GPS数据,使用`fusegps`函数对状态进行更新,修正姿态和位置估计。
3. 保存数据:将预测和更新后的位置数据保存到`estPositions`和`gpsPoss`中。
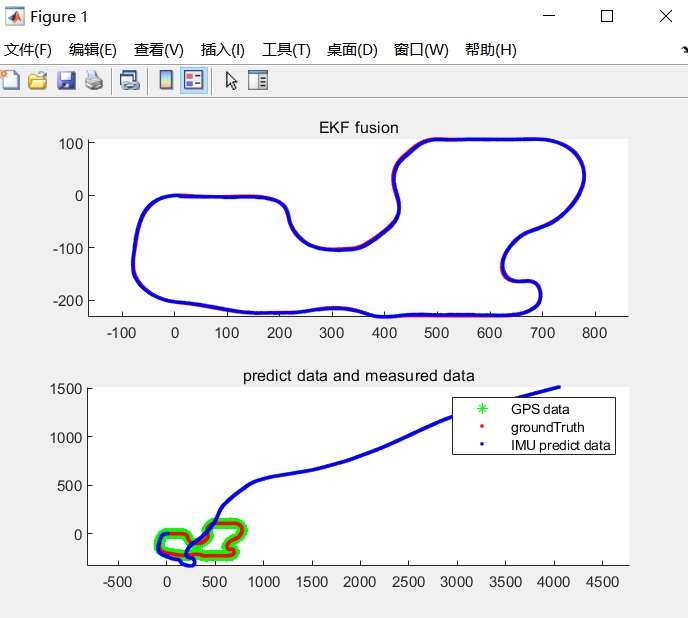
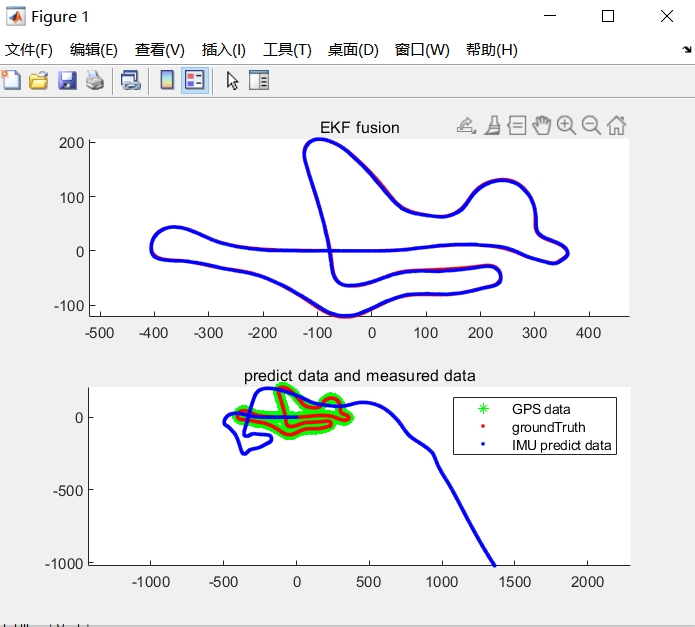
最后,代码使用`subplot`和`plot`函数将真实位置、估计位置和GPS数据进行可视化展示。
接下来,代码重复了上述的过程,并加载了另一个名为`trajData2.mat`的数据文件,其中包含了另一个车辆的轨迹数据。代码的结构和功能与前面的部分基本相同,只是使用了不同的数据文件和参数。
此外,代码还定义了一些子函数,如`IMUstateTranTcn`函数用于更新状态,`repairQuaternionFcn`函数用于修正四元数的值。这些子函数在主程序中被调用,用于实现状态的更新和修正。
总体而言,这段代码主要是一个数据融合程序,应用在车辆导航和定位领域。它通过融合GPS和IMU数据,估计车辆的位置和姿态。代码的主要思路是使用滤波算法(扩展卡尔曼滤波器)对IMU和GPS数据进行融合,通过预测和更新步骤来估计车辆的状态。代码涉及到了滤波算法、姿态估计、位置估计、传感器模型等知识点。
YID:6745659043907933


 浙公网安备 33010602011771号
浙公网安备 33010602011771号