基于驾驶员轨迹跟踪辅助系统的 CarSim/Simulink联合仿真 建立了独立的基
基于驾驶员轨迹跟踪辅助系统的 CarSim/Simulink联合仿真
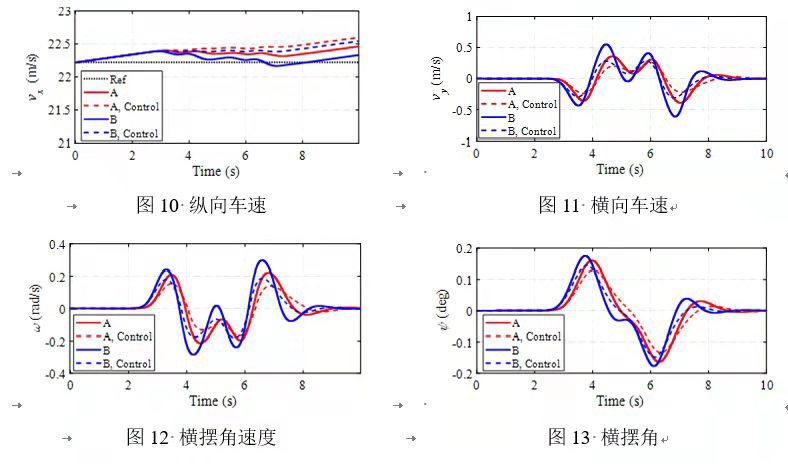
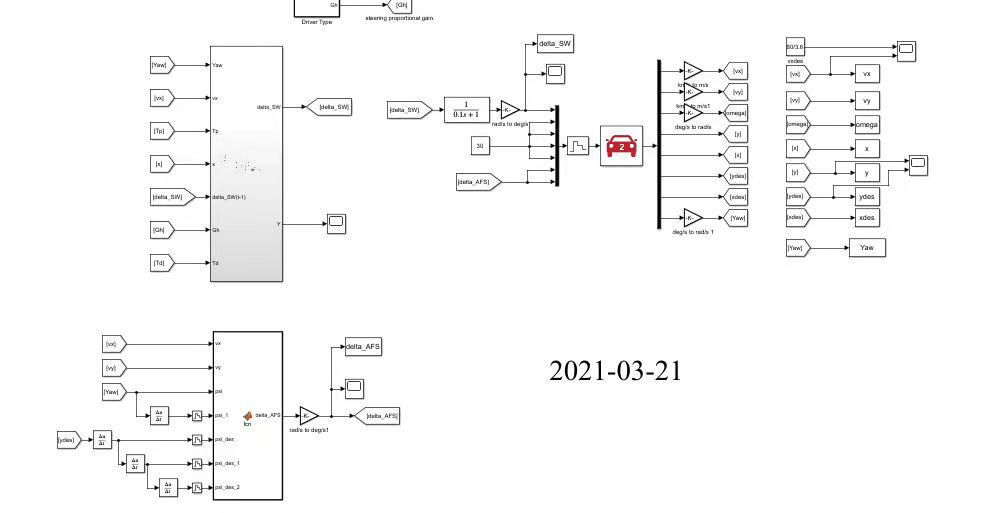
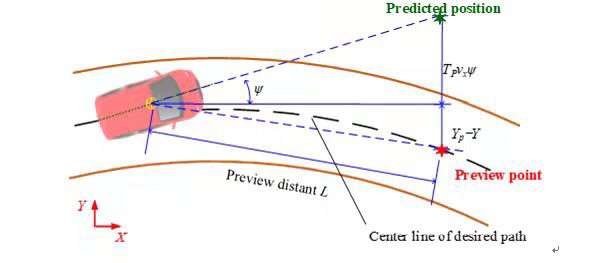
建立了独立的基于控制论的simulink驾驶员模型,使用鲁棒性好的滑模控制提高驾驶员的航向角跟踪精度。
提供的文档包括CarSim文件导入教程,和控制算法推导过程,包括了滑模控制基于李雅普诺夫的稳定性证明。
MATLAB版本为2018b CarSim版本为2018
ID:3899656133874618



基于驾驶员轨迹跟踪辅助系统的 CarSim/Simulink联合仿真
建立了独立的基于控制论的simulink驾驶员模型,使用鲁棒性好的滑模控制提高驾驶员的航向角跟踪精度。
提供的文档包括CarSim文件导入教程,和控制算法推导过程,包括了滑模控制基于李雅普诺夫的稳定性证明。
MATLAB版本为2018b CarSim版本为2018
ID:3899656133874618

 浙公网安备 33010602011771号
浙公网安备 33010602011771号