标定和定位的关系
手眼标定
手眼标定可以利用某真值位置和传感器观测位置对比得到外参。
关联
本质上是外参不同引起的看同一外接参照物,认为自身运动轨迹的不同。
位置
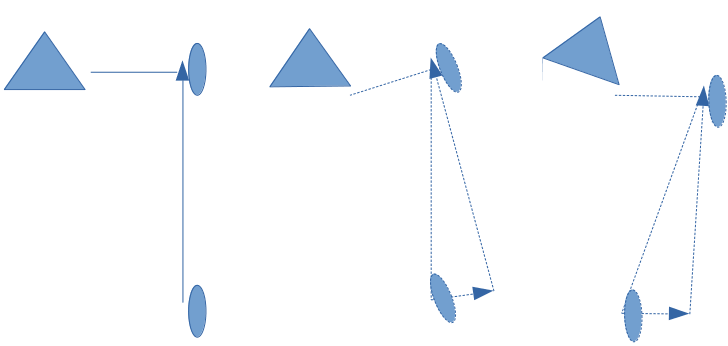
如上观测同一建筑(三角形,上顶点是北方),
真实轨迹(左图):是向北直行是在向正前方走
世界坐标系->偏置传感器轨迹(中间图):向北直行是在向正前方走
自身传感器坐标系(右图):向北直行是在向自己右前方走
由标定偏差引起的自身坐标系下方向错误。
解决办法是将自身传感器方向掰回右前方走的这个角度。
角度
行进过程中角度变化是一致的,只是当前传感器看到的自身角度与真值有固定偏差。
标定数据集可以由定位数据集加偏角度,yaw换算成xy方向上的位移。
pitch换算成xz方向上的位移。
roll换算成yz方向上的位移。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号