最简单的VSLAM/BA
问题定义
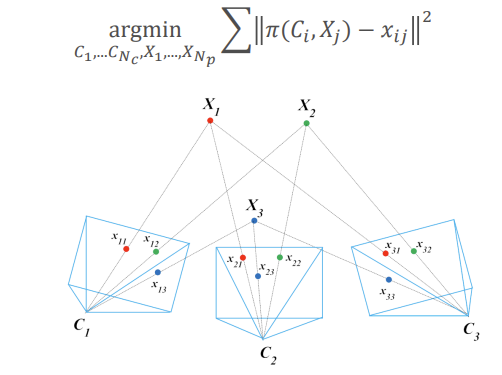
优化量相机位姿C,3D点坐标X
在连续k帧均观测到某点X,某位姿C下共观测到n个特征点
最小优化集及可求解性分析
位姿为6D(x y z yaw roll pitch),最少需要六个方程,每点投影误差x、y方向共两个方程,故每帧需要至少三个点来求解当前帧C
3D点坐标为3D(x y z),最少需要三个方程,每个位姿C中可提供投影误差x、y方向两个方程,故每个点至少需要两帧观测来确定位姿
综上Full(求解所有量)BA问题,至少需要连续两帧都至少观测到共同三个点,才能求解,子问题有已知相对位姿求3D点(3D点恢复问题),已知3D点求相对位姿(Lidar重建、双目重建)
其他情况,如:加入相机内外参作为待估计量
内参4-9维 基础投影模型cx cy fx fy + 畸变量,外参6维(6D) x y z yaw roll pitch,则需要更多15个求解方程, 两个方法可以增加方程数量:1、每帧观测到的点数;2、共同观测到这些点的帧数。
其中新增共同观测点数量k可以带来2m个新约束,并可以乘以观测到帧数k变为2mk个约束,同时需要减去其新引入的估计量位姿坐标3m,最后可以带来的新约束量为2mk-3m个;
共同观测到这些点的帧数,每帧可以带来每帧中共同观测到点数量n的倍数2n个约束同时需要减去引入的新观测量位姿6个求解量,即2n-6个新约束。
其他名词解释
明确输入
输入为某个初始位姿(可以是轮速计+IMU积分、GPS定位给的、纯IMU积分给的),连续的图像,真值点云(对比用)
明确输出
相机的位姿
关键点
BA、三角化、特征提取和匹配。
问题求解
目标拆解
三角化:输入(相邻两帧图像的关联像素点、与其初始位姿) 输出相机坐标系下的3D点
特征提取:任意方式即可(superpoint ORB SIFT 等等)
特征匹配:以上descrip(描述子-特征计算表述值)的匹配
BA:这个最难需要的输入最多,BA的目标就是得到更准确的3D点/位姿。目标是求解某个准确的3D点,首先需要第一帧观测到此和后面几帧观测到的二维像素特征点(对应图像上的2D点) ,然后你还需要某一帧(一般是接下来的第二帧、这个不影响、因为我们优化的就是这个不准确值) 和第一帧三角化的3D点,最后需要这几帧的位姿(如果有位姿容器直接记录于第几帧观测到即可)。(3(3D的xyz) + 2(px py)*n + 6(x y z r p y)*n)* m
特征点管理:这个同样很重要,因为没有看懂其他代码的。。我随便写的,大概就是观测到1、2两帧后就完成初始化->得到地图点mpsa(map points all)记录第一帧的3D点、第几帧观测到的、二维像素坐标,然后2、3两帧继续推断地图点mpsn(map points now),然后用mpsn的descrip(描述子)与mpsa的descrip(描述子)匹配,匹配上的就不再重复加入 但是记录mpsa匹配点在第几帧观测到的还会附带更新观测到这个点的二维像素坐标,没配上的直接塞到mpsa中,然后重复直到到达滑窗最大值。过了滑窗/mpsa数量达到一定值后开始删除旧的。
三角化代码:参考VINS
void TriangulatePoint(Eigen::Matrix<double, 3, 4> &proj0, Eigen::Matrix<double, 3, 4> &proj1,
cv::Point2f &point0, cv::Point2f &point1, Eigen::Vector3d &point_3d) {
Eigen::Matrix4d design_matrix = Eigen::Matrix4d::Zero();
design_matrix.row(0) = point0.x * proj0.row(2) - proj0.row(0);
design_matrix.row(1) = point0.y * proj0.row(2) - proj0.row(1);
design_matrix.row(2) = point1.x * proj1.row(2) - proj1.row(0);
design_matrix.row(3) = point1.y * proj1.row(2) - proj1.row(1);
Eigen::Vector4d triangulated_point;
triangulated_point =
design_matrix.jacobiSvd(Eigen::ComputeFullV).matrixV().rightCols<1>();
point_3d(0) = triangulated_point(0) / triangulated_point(3);
point_3d(1) = triangulated_point(1) / triangulated_point(3);
point_3d(2) = triangulated_point(2) / triangulated_point(3);
}
//pro设为3*4方便计算 与4*4 = 3*3旋转矩阵 + 3*1位移 没区别特征提取随便采用的SIFT 匹配描述子采用的余弦值大小
Frame GetFrameKeypoint(cv::Mat im, int frame_id) {
//undistort pic
cv::Ptr<cv::SIFT> detector = cv::SIFT::create(500);
std::vector<cv::KeyPoint> keyPoint;
cv::Mat descriptors;
detector->detectAndCompute(im, cv::Mat(), keyPoint, descriptors); //descriptors size[128 x 500] cols width 128 rows height 500
std::vector<std::vector<std::pair<std::size_t, cv::KeyPoint>>> keyPointv;
keyPointv.resize(ngridcells);
std::vector<Keypoint> vgridkps;
Frame frame;
for(std::size_t i{0U}; i < keyPoint.size(); i++) {
keyPointv[GetPointCell(keyPoint[i].pt)].push_back(std::make_pair(i, keyPoint[i]));
}
int kpid{0};
for(std::size_t i{0U}; i < keyPointv.size(); i++) {
if(keyPointv[i].size() > 1) {
std::sort(keyPointv[i].begin(), keyPointv[i].end(), compare_response);
if(keyPointv[i][0].second.response > 0.04){
Keypoint kps;
kps.lmid = kpid;
kps.px = keyPointv[i][0].second.pt;
kps.desc = descriptors.row(static_cast<int>(keyPointv[i][0].first));
vgridkps.push_back(kps);
kpid ++;
// cv::circle(im, keyPointv[i][0].second.pt, 1, cv::Scalar(255, 0, 0), cv::FILLED);
}
}
}
std::cout << "get keypoints" << kpid << std::endl;
frame.kfid_ = frame_id;
frame.vgridkps_ = vgridkps;
// vgrid 得到在某个gird的keypoint
return frame;
}
double DescriptorDistance(const Eigen::Matrix<double, 1, 128> &a, const Eigen::Matrix<double, 1, 128> &b){
Eigen::Matrix<double, 1, 128> a_n{a/a.norm()};
Eigen::Matrix<double, 1, 128> b_n{b/b.norm()};
Eigen::Matrix<double, 128, 1> an_t{a_n.transpose()};
return b_n*an_t;
}BA 同样参考VINS
struct PointReprojectionError{
public:
// observation is undistored
PointReprojectionError(cv::Point2f observed_in, Eigen::Matrix3d camera_K_in, Eigen::Vector4d camera_D_in, Eigen::Matrix4d Trans_in) :
observed(observed_in), camera_K(camera_K_in), camera_D(camera_D_in), Trans(Trans_in) {}
template<typename T>
bool operator()(const T* point3d, T* residuals) const {
Eigen::Matrix<T, 3, 3> camera_R;
camera_R << T(Trans(0, 0)), T(Trans(0, 1)), T(Trans(0, 2)),
T(Trans(1, 0)), T(Trans(1, 1)), T(Trans(1, 2)),
T(Trans(2, 0)), T(Trans(2, 1)), T(Trans(2, 2));
Eigen::Matrix<T, 3, 1> point3d_V{point3d[0], point3d[1], point3d[2]};
point3d_V = camera_R*point3d_V;
point3d_V.x() += T(Trans(0, 3));
point3d_V.y() += T(Trans(1, 3));
point3d_V.z() += T(Trans(2, 3));
T fx = (T)camera_K(0, 0);
T fy = (T)camera_K(1, 1);
T cx = (T)camera_K(0, 2);
T cy = (T)camera_K(1, 2);
T keypoint2d_x = fx * point3d_V[0]/point3d_V[2] + cx;
T keypoint2d_y = fy * point3d_V[1]/point3d_V[2] + cy;
residuals[0] = pow(keypoint2d_x - T(observed.x), 2);
residuals[1] = pow(keypoint2d_y - T(observed.y), 2);
return true;
}
static ceres::CostFunction* Create(cv::Point2f observed_in, Eigen::Matrix3d camera_K_in, Eigen::Vector4d camera_D_in, Eigen::Matrix4d Trans_in) {
return (new ceres::AutoDiffCostFunction<PointReprojectionError, 2, 3>(new PointReprojectionError(observed_in, camera_K_in, camera_D_in, Trans_in)));
}
private:
cv::Point2f observed;
Eigen::Matrix3d camera_K;
Eigen::Vector4d camera_D;
Eigen::Matrix4d Trans;
};特征点管理 参考的OV2SLAM(真的很想入门这个SLAM 大概是kitti排名单目第一的水平)
首先需三个struct 特征点Kepoint 帧Frame 地图点Mappoint
Keypoint 需要记录二维像素坐标、描述子、是否和Map点关联上了(retracked)、第几个特征点(id)
Frame 需要记录所有Keypoint、是第几帧
Mappoint 需要记录第几个地图点(id)、3D点坐标、被哪些帧看到了(set_kfid)、在某一帧内是第几个特征点(map_kf_desc)
用以下容器索引
或建立以下三个Struct
struct Keypoint {
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
int id;
cv::Point2f px;
int scale;
cv::Mat desc;
bool is_retracked;
Keypoint() : id(-1), scale(0), is_retracked(false)
{}
};class Frame {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
Frame() {};
Frame(const Frame &F) {
}
Frame& operator=(const Frame& F){
kfid_ = F.kfid_;
vgridkps_ = F.vgridkps_;
return *this;
}
std::vector<Keypoint> vgridkps_; //记录所有提取到的特征点
int kfid_; //记录是第几帧
};class MapPoint {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
MapPoint() {}
MapPoint(const MapPoint& mp){
id_ = mp.id_;
set_kfids_ = mp.set_kfids_;
ptxyz_ = mp.ptxyz_;
kfid_ = mp.kfid_;
invdepth_ = mp.invdepth_;
desc_ = mp.desc_;
map_kf_desc_ = mp.map_kf_desc_;
}
// MapPoint id
int id_;
// Set of observed KF ids
std::set<int> set_kfids_;
// 3D position
Eigen::Vector3d ptxyz_;
// Anchored position
int kfid_;
double invdepth_;
// Mean desc and list of descs
cv::Mat desc_;
std::unordered_map<int, cv::Mat> map_kf_desc_;
};首先我有两个vector容器 记录了到过当前的GPS坐标点inspos 图像picv->frame_all
关联关系:3D点:Mappoint.ptxyz_ 被哪些帧看到了:set_kfids_ 帧对应的二维坐标:frame_all[set_kfids_].vgridkps[map_kf_desc_].px翻译成人话就是 所有图像提取的过特征的帧里面 对应的mappoint保存的特征点/描述子 ID(这两者是一一对应的) 对应的二维像素点
void GetPoints(std::vector<std::pair<double, cv::Mat>> picv, std::vector<ins> ins_data,
const cv::Mat& K1, const cv::Mat& D1, Eigen::Matrix4d extrinsic) {
int nlmid{0};
int mpsid{0};
while(pcur < picv.size() - 1){
std::cout << pcur << "pari \n";
if(first_frame) {
std::unordered_map<int, MapPoint> map_pssigle;
Frame first_fr;
GetMapPoints(picv, ins_data, first_fr, K1, D1, extrinsic, map_pssigle);
map_pkfs.insert({pcur, first_fr});
for(std::unordered_map<int, MapPoint>::iterator its = map_pssigle.begin(); its != map_pssigle.end(); its++) {
map_psall.insert({mpsid, its->second});
mpkps.insert({mpsid, first_fr.vgridkps_[its->second.map_kf_desc_.begin()->first]});
mpsid ++;
}
set_kfids.emplace(pcur);
first_frame = false;
std::cout << "init \n";
} else {
// match to map
cv::Mat img{picv[pcur].second.clone()};
std::unordered_map<int, MapPoint> map_pssigle;
Frame fr;
GetMapPoints(picv, ins_data, fr, K1, D1, extrinsic, map_pssigle);
std::cout << "get Frame and Mappoints \n";
map_pkfs.insert({pcur, fr});
std::cout << "track begin \n";
int match_size{0};
for(std::unordered_map<int, MapPoint>::iterator ita = map_psall.begin(); ita != map_psall.end(); ita++){
double bestDist{0.0};
std::size_t bestIdx{0};
Eigen::Matrix<double, 1, 128> descriptorsmap;
// std::cout << ita->first << " ";
cv::cv2eigen(ita->second.desc_, descriptorsmap);
for(std::unordered_map<int, MapPoint>::iterator its = map_pssigle.begin(); its != map_pssigle.end(); its++) {
Eigen::Matrix<double, 1, 128> descriptorskp;
cv::cv2eigen(its->second.desc_, descriptorskp);
double dist = DescriptorDistance(descriptorsmap, descriptorskp);
if(dist > bestDist){
bestDist = dist;
bestIdx = its->first;
}
}
if(bestDist > 0.90) { //matched //cv匹配
Eigen::Matrix4d posecur;
InstoPose(ins_data[pcur], posecur);
Eigen::Vector3d points3d;
set_kfids.emplace(pcur);
map_psall[ita->first].set_kfids_.emplace(pcur);
map_psall[ita->first].map_kf_desc_.insert({bestIdx, map_pssigle.at(bestIdx).desc_});
map_psall[ita->first].desc_ = map_pssigle.at(bestIdx).desc_;
map_pssigle.at(bestIdx).isobs_ = true;
// 存n个frame id
// 存n个 keypoints id
// 存一个descripters
// 存一个point3d
// 加入新观测
// if( 0.9 * secdist < bestdist ) {
// bestid = -1;
// }
//
match_size ++;
cv::circle(img, fr.vgridkps_[bestIdx].px, 5, cv::Scalar(255, 0, 0), cv::FILLED);
} else {
// map_psall.erase(ita->first);
}
}
std::cout << match_size << " points tracked\n";
for(std::unordered_map<int, MapPoint>::iterator its = map_pssigle.begin(); its != map_pssigle.end(); its++) {
if(map_pssigle.at(its->first).isobs_ == false){
map_psall.insert({mpsid, its->second});
mpkps.insert({mpsid, fr.vgridkps_[its->second.map_kf_desc_.begin()->first]});
mpsid ++;
}
}
cv::imwrite("./" + std::to_string(pcur) + ".jpeg", img);
}
pcur ++;
}串起来
callback(picin, posin){
inspos = slerpins2pos(posin, picin);
vector<pair<mat, pos>> picinsv;
picinsv.push_back({getframe(pic), inspos});
pcur = 0;
if(first_frame && picinsv.size > 2){
mpsa = triangulate(picinsv[pcur]);
pcur++;
}else {
match2map();
if(winsize > n){
pose,3Dpoints = BA();
mpsa.erase(pcur - n);
}
}
}
 浙公网安备 33010602011771号
浙公网安备 33010602011771号