激光雷达与惯性测量单元标定Lidar和IMU的标定lidar_IMU_calib
一、环境编译
# init ROS workspace
mkdir -p ~/catkin_li_calib/src
cd ~/catkin_li_calib/src
catkin_init_workspace
# Clone the source code for the project and build it.
git clone https://github.com/APRIL-ZJU/lidar_IMU_calib
# ndt_omp
wstool init
wstool merge lidar_IMU_calib/depend_pack.rosinstall
wstool update
# Pangolin
./build_submodules.sh
## build
cd ../..
catkin_make
source ./devel/setup.bash
论文地址:https://arxiv.org/pdf/2007.14759.pdf
二、数据录制
鉴于是基于NDT匹配算法的里程计计算,
数据录制需要注意:
1.需要在平面多的房间里录制;
2.xyz轴方向都需要移动
3.不要旋转过/移动过猛
rosbag -record -o out /velodyne_packets /你的IMU数据话题
查看数据:
rosrun nodelet nodelet standalone velodyne_pointcloud/CloudNodelet _calibration:="/home/XXX(your username)/catkin_velodyne(your velodyne catkin工作环境)/src/velodyne/velodyne_pointcloud/params/VLP16db.yaml"
然后播放bag包 rosbag play yourbagname.bag
在rviz中查看即可rosrun rviz rviz
三、适配launch
修改licalib_gui.launch文件
注意此处的velodyne数据为velodyne_packets
<?xml version="1.0"?>
<launch>
<arg name="topic_imu" default="/你的imu数据话题" />
<arg name="path_bag" default="/home/$(env USER)/bag包位置" />
<arg name="bag_start" default="0" />
<arg name="bag_durr" default="48" />
<arg name="scan4map" default="15" />
<arg name="lidar_model" default="VLP_16" />
<arg name="ndtResolution" default="0.5" /> <!-- 0.5 for indoor case and 1.0 for outdoor case -->
<arg name="time_offset_padding" default="0.015" />
<arg name="show_ui" default="true" />
<node pkg="li_calib" type="li_calib_gui" name="li_calib_gui" output="screen">
<!-- <node pkg="li_calib" type="li_calib_gui" name="li_calib_gui" output="screen" clear_params="true" launch-prefix="gdb -ex run --args">-->
<param name="topic_imu" type="string" value="$(arg topic_imu)" />
<param name="topic_lidar" type="string" value="/velodyne_packets" />
<param name="LidarModel" type="string" value="$(arg lidar_model)" />
<param name="path_bag" type="string" value="$(arg path_bag)" />
<param name="bag_start" type="double" value="$(arg bag_start)" />
<param name="bag_durr" type="double" value="$(arg bag_durr)" /> <!-- for data association -->
<param name="scan4map" type="double" value="$(arg scan4map)" />
<param name="ndtResolution" type="double" value="$(arg ndtResolution)" />
<param name="time_offset_padding" type="double" value="$(arg time_offset_padding)" />
<param name="show_ui" type="bool" value="$(arg show_ui)" /><!-- 我们用ui界面来进行操作 -->
</node>
</launch>
三、运行及相关问题
运行:
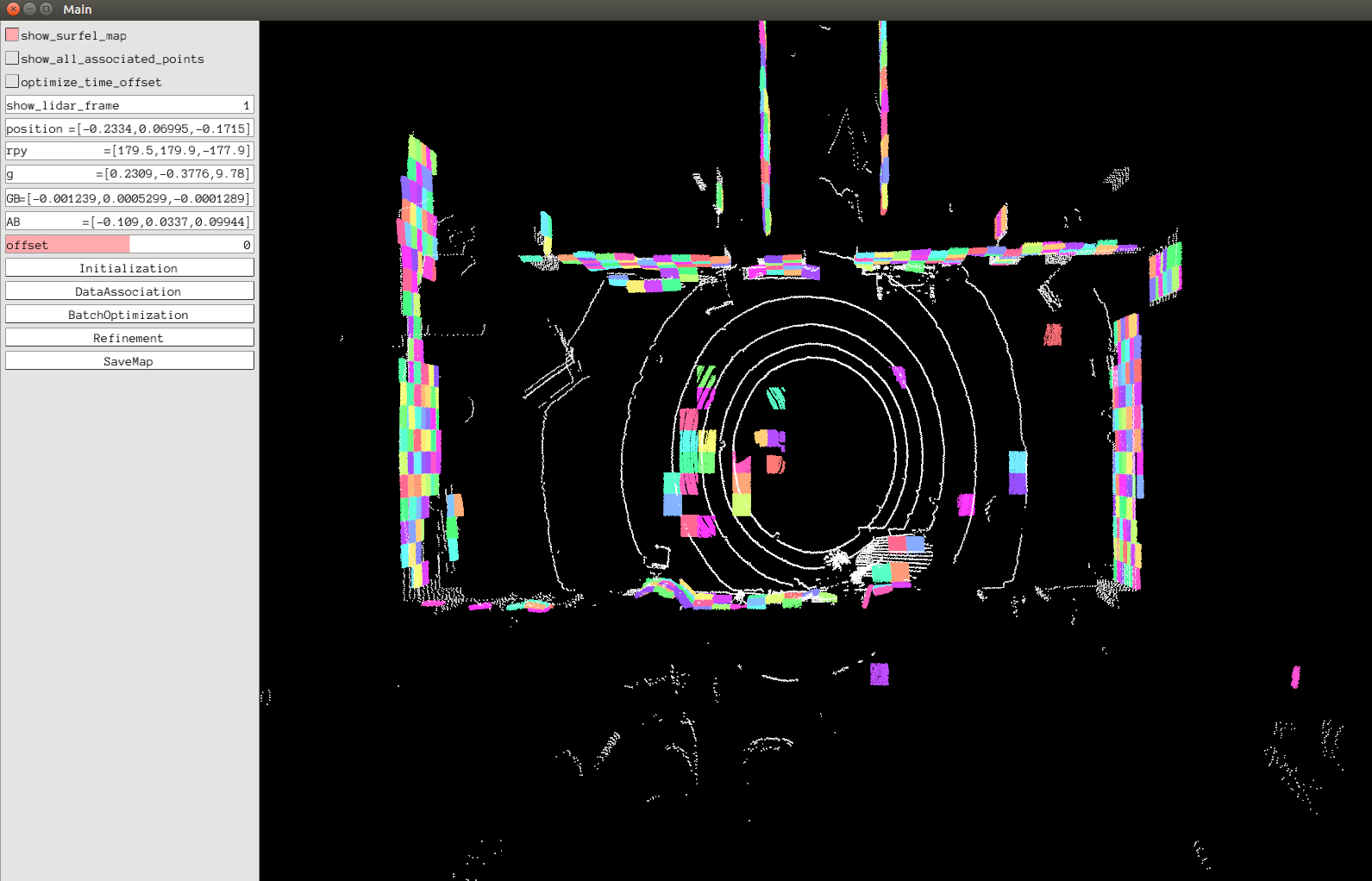
在UI界面依顺序点击:初始化(Initialization)->初始化(Initialization)...直到初始化成功(判定标准看问题1.)->数据关联(Data Association)->初始化优化(Batch Optimization)->迭代优化(Refinement)->迭代优化(Refinement)...直至数据不再变换
问题:
1.初始化失败问题
有可能遇到
[Initialization] fails.的问题,此时将lidar_IMU_calib -> src -> core -> inertial_initializer.cpp中最后几行前,加入 std::cout << "Vector4d cov(2)value :" << cov(2) << std::endl;这一行代码,一直初始化,直到输出结果为2.5左右即可初始化成功
std::cout << "Vector4d cov" << cov(2) << std::endl;
if (cov(2) > 0.25) {
q_ItoS_est_ = q_ItoS_est;
rotaion_initialized_ = true;
return true;
} else {
return false;
}
}
}

2.数据跑飞问题
如果你录取的数据,不是在平面多的房间里或者旋转过大,极有可能出现数据跑飞的问题,表现就是XYZ偏差超出正常值,这时候需要从录数据。
四、我的标定结果
精度无从考证。
我的是在小车上安装标定的,分别做了X方向的行进,一定高度的Z轴越野,以及带Y方向加速的旋转运动以进行标定,其中Z轴越野加减速较大!
附三次标定结果,我们取其平均数。
其平均数(以IMU为参考坐标系):X轴偏移量23CM Y轴:8CM Z轴:15.5厘米,由于不知道激光雷达中心在何处,我们手工测量大改X轴22-24cm Y轴0cm Z轴12-18CM
我们舍弃Y轴数据只用X,Z轴数据,因为想要一个沿IMU的X方向行进的小车做Y轴的平移实在困难,我们就将其视为Y轴无偏移,因为二者我们都是手工测量将其置于小车中间的。
角度偏移取平均:R(绕X)0.5° P(绕Y)0° Y(绕Z)2.1°
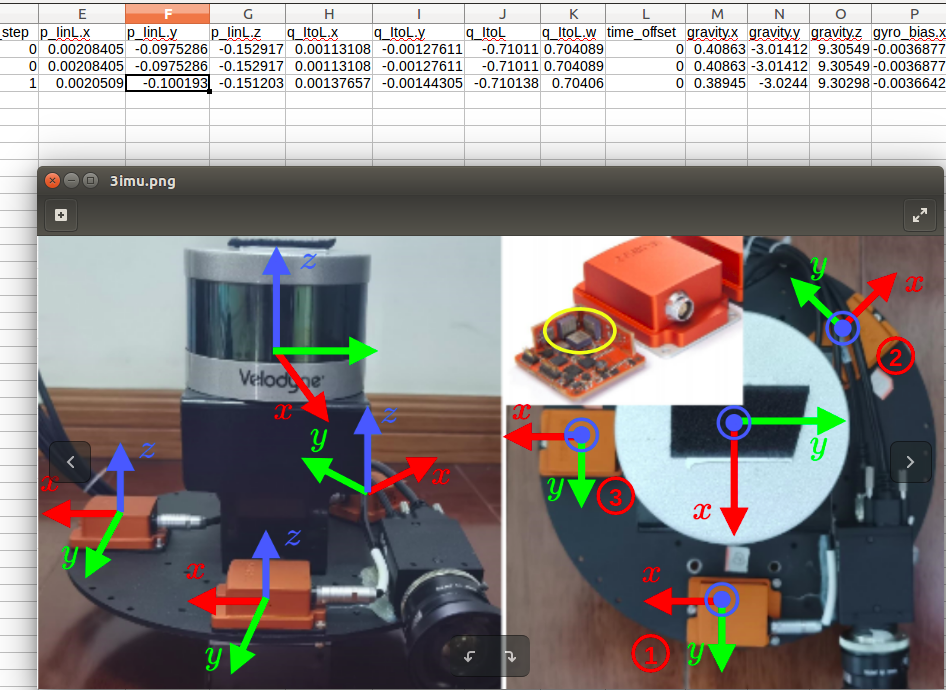
以下使我们的小车平台

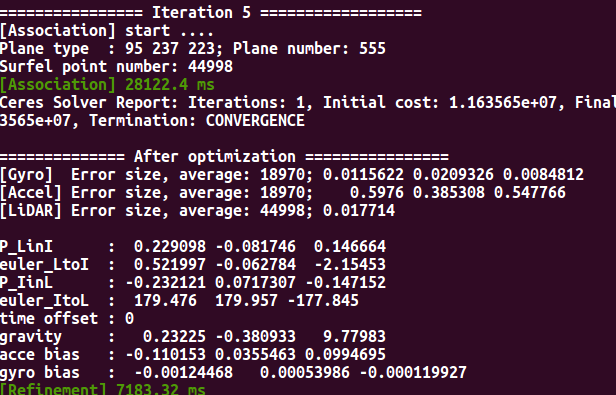
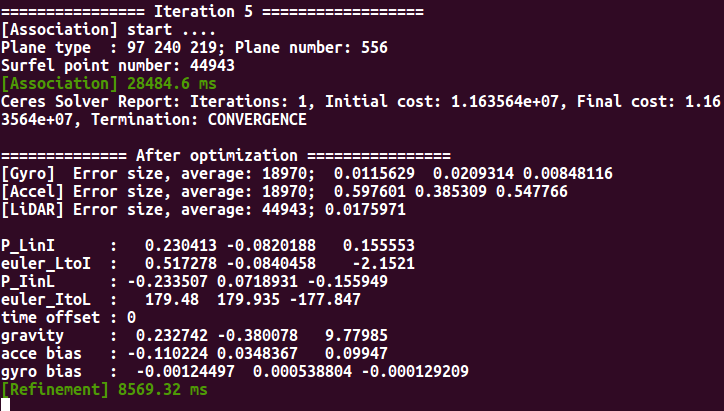
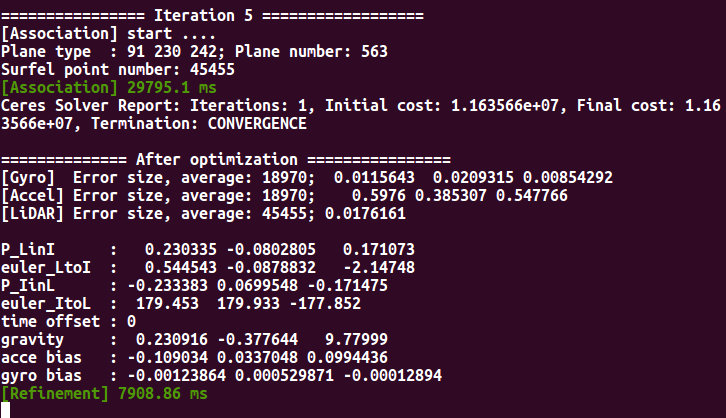
五、数据分析(作者示例数据分析)
我们看到x偏差为-10cm左右,y为0cm左右,z为-15cm左右。可以通过图中看到这是以IMU为参考系的激光雷达的距离!绕Z轴-90左右->即右手握住Z轴负方向旋转90度左右!示例标定结果很准确!虽然用的数据是Geogre01 但个人认为是Geogre03的数据及结果
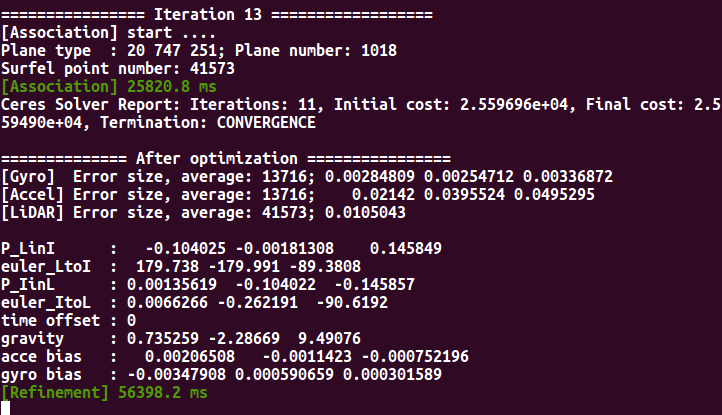
也有以激光雷达为参考坐标系的标定结果:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号