

Ubuntu22.04安装ros-humble(ros2)
一、简介
ros2的humble版本是支持ubuntu22.04 的长期版本。Ubuntu22.04和ros2 humble搭配使用。此Ubuntu版本没有官方支持的ros1
二、更新系统软件源
#1.备份Ubuntu源
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
#2.修改Ubuntu源
sudo vim /etc/apt/sources.list
#方式一:执行如下指令自动替换(推荐),然后手动屏蔽deb-src链接和jammy-proposed链接
sudo sed -i "s@http://.*archive.ubuntu.com@https://mirrors.aliyun.com@g" /etc/apt/sources.list
sudo sed -i "s@http://.*security.ubuntu.com@https://mirrors.aliyun.com@g" /etc/apt/sources.list
#方式二:手动替换(不推荐)
#删除默认全部内容快捷键:按esc键后,先按gg(到达顶部),然后dG
#默认注释了deb-src源码镜像和proposed预发布源,以提高apt update速度,如有需要可自行取消注释
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-updates main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-backports main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-backports main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-security main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-security main restricted universe multiverse
# deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-proposed main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ jammy-proposed main restricted universe multiverse然后终端执行如下指令:
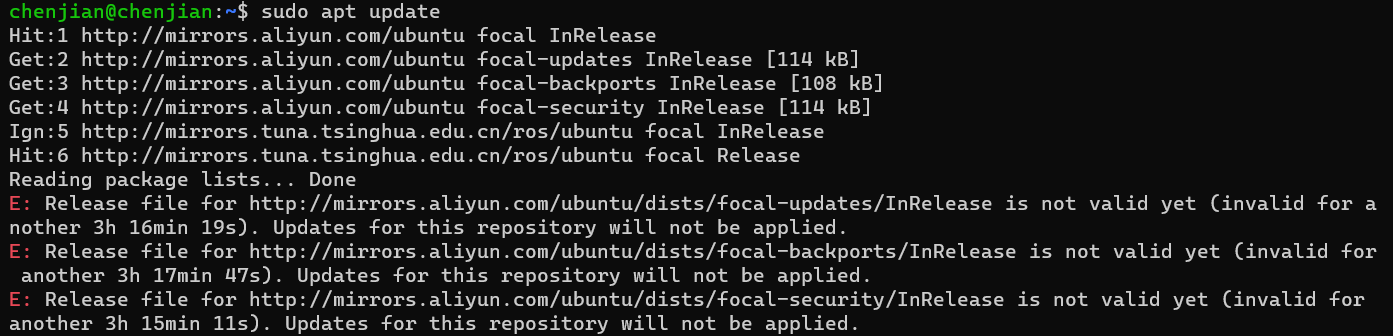
sudo apt update如果sudo apt update更新出现如下错误,是系统时间不对。
三、设置ros2软件源
#设置ros2源
sudo apt install curl gnupg2
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] https://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu jammy main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update
#如果网络不行,可以使用如下链接中描述的方法安装ros2
http://fishros.com四、安装ros2
sudo apt install ros-humble-desktop五、设置环境变量
echo "source /opt/ros/humble/setup.bash" >> ~.bashrc
#设置colcon命令补全,作用很大,提高效率
echo "source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash" >> ~/.bashrc
