
Ubuntu 16.04/18.04 安装及卸载 ROS
一、检查下Ubuntu初始环境
在正式的安装前,先检查下Ubuntu初始环境是否配置正确。
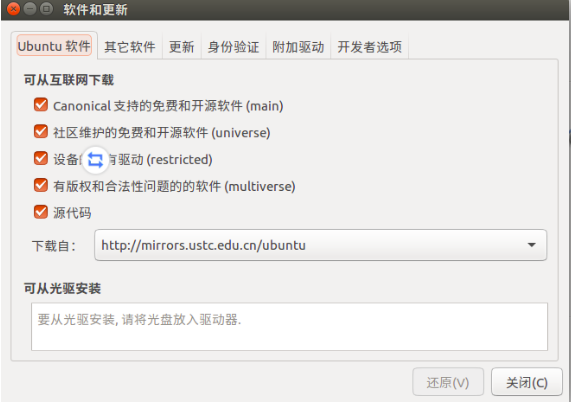
打开Ubuntu的设置->软件与更新->Ubuntu软件->勾选关键字universe,restricted,multiverse三项。 如图所示
二、添加sources.list
1 | sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' |
三、添加keys
1 | sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 |
四、系统更新
1 | sudo apt update && sudo apt-get upgrade |
五、安装ROS
ROS中有很多函数库和工具,官网提供了四种默认的安装方式,当然也可以单独安装某个特定的软件包。这四种方式包括桌面完整版安装、桌面版安装,基础版安装、单独软件包安装。推荐安装桌面完整版安装(包含ROS、rqt、rviz、通用机器人函数库、2D/3D仿真器、导航以及2D/3D感知功能),如下:
1 2 3 4 5 | //16.04//sudo apt-get install ros-kinetic-desktop-full//18.04//sudo apt-get install ros-melodic-desktop-full |
六、安装依赖项
1 | sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential ros-melodic-ros //(根据自己实际的ROS版本确定中间的名字) |
七、配置ROS
配置ROS是安装完ROS之后必须的工作。
1、初始化rosdep
1 | sudo rosdep init && rosdep update |
这一步初始化rosdep,是使用ROS之前的必要一步。rosdep可以方便在你需要编译某些源码的时候为其安装一些系统依赖,同时也是某些ROS核心功能组件所必需用到的工具。
如果报错:
1 2 3 | ERROR: cannot download default sources list from:https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.listWebsite may be down. |
1.1 解决办法1(18.04) 是网络问题,切换网络。
1.2 改参数(16.04)
1 2 3 | sudo gedit /etc/hosts在打开的文件末尾一行添加: 151.101.84.133 raw.githubusercontent.comsudo rosdep init && rosdep update |
安装完ROS后,初始化指令sudo rosdep init失败,提示: sudo: rosdep:command not found
按照以下方式解决:
sudo apt install rospack-tools2、ROS环境配置
注意: ROS的环境配置,使得你每次打开一个新的终端,ROS的环境变量都能够自动配置好,也就是添加到bash会话中,因为命令source /opt/ros/kinetic/setup.bash 只在当前终端有作用,即具有单一时效性,要想每次新开一个终端都不用重新配置环境,就用echo语句将命令添加到bash会话中。
1 | echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc //16.04 |
1 | echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc //18.04 |
注:ROS节点权限问题,运行某些节点需要管理员权限(涉及硬件),则也要在root用户中设置环境变量。切换root 用户,添加环境变量
1 2 3 | sudo suecho "source /opt/ros/noetic/setup.bash" >> ~/.bashrc //16.04echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc //18.04source ~/.bashrcexit |
至此,ROS的安装就结束了,重启电脑,下面测试ROS能否正常运行。
八、测试ROS
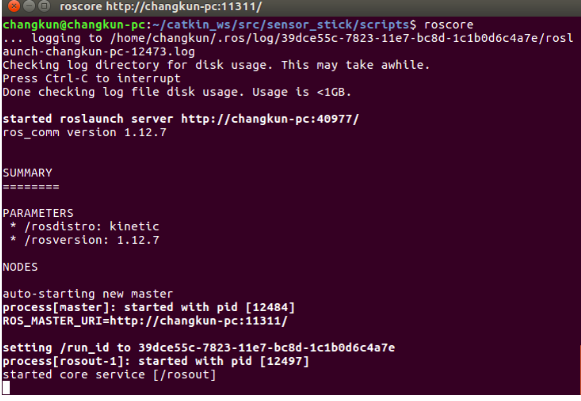
首先启动ROS,输入代码运行roscore:
1 | roscore |
如果出现下图所示,那么说明ROS正常启动了!
九、测试小乌龟
接着我们测试ROS的吉祥物--小海龟,来简单的测试ROS运行是否正常,同时也来体验一下ROS的神奇与精彩!
启动roscore后,重新打开一个终端窗口,输入:
1 | rosrun turtlesim turtlesim_node |
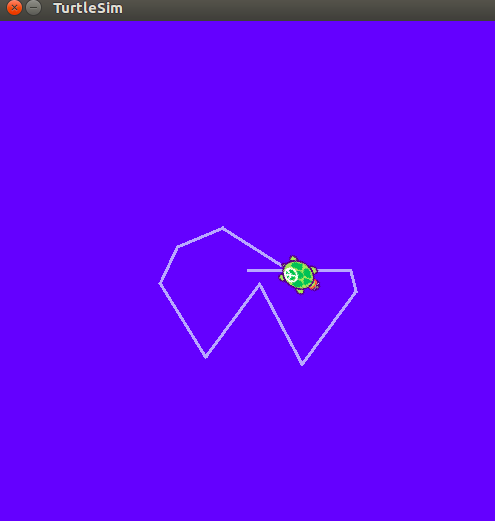
你还看到一只萌萌的海龟出现在屏幕上,那么该怎么样来操纵这只小海龟呢?重新打开新的一个终端,输入:
1 | rosrun turtlesim turtle_teleop_key |
将鼠标聚焦在第三个终端窗口上,然后通过键盘上的方向键,进行操作小海龟,如果小海龟正常移动,并且在屏幕上留下自己的移动轨迹,如下图。恭喜你,ROS已经成功的安装、配置并且运行!
十、卸载ROS
1 | sudo apt remove ros-* |
十一、catkin_tool安装
catkin 工具家族有一系列工具
catkin init,catkin config, catkin create pkg, catkin build, catkin list, catkin clean等工具
catkin build 和catkin_make 都是用来编译功能包的,但是catkin build会将工作空间里所有的包同时单独(isolated)编译,编译过程互不影响。
1 | sudo apt-get install python-catkin-tools |


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· Manus的开源复刻OpenManus初探
· AI 智能体引爆开源社区「GitHub 热点速览」
· 三行代码完成国际化适配,妙~啊~
· .NET Core 中如何实现缓存的预热?