CFRunLoop 源码学习笔记(CF-1151.16)
1、CFRunLoopModeRef 什么时候创建的?
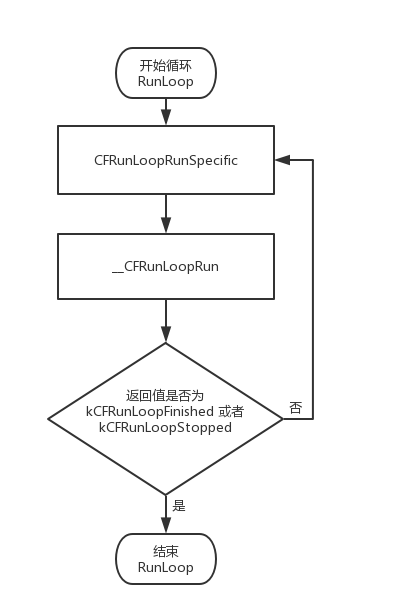
__CFRunLoopRun 源码, 去掉windows、disaptch_timer 支持
static int32_t __CFRunLoopRun(CFRunLoopRef rl, CFRunLoopModeRef rlm, CFTimeInterval seconds, Boolean stopAfterHandle, CFRunLoopModeRef previousMode) {
uint64_t startTSR = mach_absolute_time();
/* 首先判断 CFRunLoopRef 是否停止,停止的话,重置停止状态并且返回停止状态 */
if (__CFRunLoopIsStopped(rl)) {
/* 是否设置了停止位 */
__CFRunLoopUnsetStopped(rl);
/* 重置停止位、并返回停止状态 */
return kCFRunLoopRunStopped;
} else if (rlm->_stopped) {
/* 这个模式下是否停止了、并且重置模式停止状态 */
rlm->_stopped = false;
/* 返回停止 */
return kCFRunLoopRunStopped;
}
mach_port_name_t dispatchPort = MACH_PORT_NULL; /* 主线程端口或者空 */
Boolean libdispatchQSafe = pthread_main_np() &&
(
(HANDLE_DISPATCH_ON_BASE_INVOCATION_ONLY && NULL == previousMode) ||
(!HANDLE_DISPATCH_ON_BASE_INVOCATION_ONLY && 0 == _CFGetTSD(__CFTSDKeyIsInGCDMainQ))
);
if (libdispatchQSafe && (CFRunLoopGetMain() == rl) && CFSetContainsValue(rl->_commonModes, rlm->_name)) dispatchPort = _dispatch_get_main_queue_port_4CF(); /* libDispatch -> private.h */
/* 定义一个 dispatch_source_t 为了CFRunLoopRunInMode 自定义时间时存在,为了做唤醒使用 */
dispatch_source_t timeout_timer = NULL;
struct __timeout_context *timeout_context = (struct __timeout_context *)malloc(sizeof(*timeout_context));
if (seconds <= 0.0) { // instant timeout
seconds = 0.0;
timeout_context->termTSR = 0ULL;
} else if (seconds <= TIMER_INTERVAL_LIMIT/* TIMER_INTERVAL_LIMIT 504911232.0*/) {
/* 尝试超时后唤醒,如果当前线程出于等待状态的情况下 */
dispatch_queue_t queue = pthread_main_np() ? __CFDispatchQueueGetGenericMatchingMain() : __CFDispatchQueueGetGenericBackground();
/* 创建source */
timeout_timer = dispatch_source_create(DISPATCH_SOURCE_TYPE_TIMER, 0, 0, queue);
dispatch_retain(timeout_timer);
/* 写入source 的 上下文中 */
timeout_context->ds = timeout_timer;
timeout_context->rl = (CFRunLoopRef)CFRetain(rl);
timeout_context->termTSR = startTSR + __CFTimeIntervalToTSR(seconds);
/* 设置source的上下文 */
dispatch_set_context(timeout_timer, timeout_context); // source gets ownership of context
/* 设置时间事件的回调函数,调用了CFRunLoopWakeUp, 这个函数向等待端口发送了一个消息, 用来激活循环 */
dispatch_source_set_event_handler_f(timeout_timer, __CFRunLoopTimeout);
/* 设置时间事件的取消函数 */
dispatch_source_set_cancel_handler_f(timeout_timer, __CFRunLoopTimeoutCancel);
/* 计算触发的时间点(纳秒) */
uint64_t ns_at = (uint64_t)((__CFTSRToTimeInterval(startTSR) + seconds) * 1000000000ULL);
/* 设置source的timer, 仅仅延迟执行一次 */
dispatch_source_set_timer(timeout_timer, dispatch_time(1, ns_at)/* start */, DISPATCH_TIME_FOREVER/* interval */, 1000ULL); /* 只执行一次 */
/* 唤醒source */
dispatch_resume(timeout_timer);
} else { // infinite timeout
seconds = 9999999999.0;
timeout_context->termTSR = UINT64_MAX;
}
Boolean didDispatchPortLastTime = true;
int32_t retVal = 0;
do {
voucher_mach_msg_state_t voucherState = VOUCHER_MACH_MSG_STATE_UNCHANGED;
voucher_t voucherCopy = NULL;
/* 定义mach接收 msg 缓冲区 3k 大小 */
uint8_t msg_buffer[3 * 1024]; /* 3K */
mach_msg_header_t *msg = NULL;
mach_port_t livePort = MACH_PORT_NULL;
/* CFRunLoopModeRef->_portSet 实际上就是 mach_port_t -->>> __CFPort OR __CFPortSet */
__CFPortSet waitSet = rlm->_portSet; /* mac 下 就是 mach_port_t 等待端口集合 */
/* 重置 CFRunLoopRef->_perRunData->ignoreWakeUps = 0x57414B45; WAKUP 标识 */
__CFRunLoopUnsetIgnoreWakeUps(rl);
/* 回调 Before Timer && Source */
if (rlm->_observerMask & kCFRunLoopBeforeTimers) __CFRunLoopDoObservers(rl, rlm, kCFRunLoopBeforeTimers);
if (rlm->_observerMask & kCFRunLoopBeforeSources) __CFRunLoopDoObservers(rl, rlm, kCFRunLoopBeforeSources);
/* 回调block, 只能回到一次block? */
__CFRunLoopDoBlocks(rl, rlm);
/* source0 是否handled(回调) */
Boolean sourceHandledThisLoop = __CFRunLoopDoSources0(rl, rlm, stopAfterHandle/* __CFRunLoopRun 参数 */); //source 0 必须signed
if (sourceHandledThisLoop) {
/* 回调了Source0 */
__CFRunLoopDoBlocks(rl, rlm); //source 0
}
/* 确定端口集合接收消息是否设置永远超时,如果poll为真,则立即返回,否则无限等待直到有消息过来 */
Boolean poll = sourceHandledThisLoop || (0ULL == timeout_context->termTSR); /* 从CFRunLoopRun 过来的话 timeout_context->termTSR 永远不等于0*/
if (MACH_PORT_NULL != dispatchPort && !didDispatchPortLastTime) {
/* 首次循环不执行,因为外部定义 didDispatchPortLastTime 为 true */
msg = (mach_msg_header_t *)msg_buffer;
if (__CFRunLoopServiceMachPort(dispatchPort, &msg, sizeof(msg_buffer), &livePort, 0/*timeout == 0*/, &voucherState, NULL)) {
/* 主队列接收消息,接收消息成功则跳转到处理消息过程source1 */
goto handle_msg;
}
}
/* 执行到这里意味着 dispatchPort 没有成功接收到 mach message */
didDispatchPortLastTime = false; /* do while 循环外定义,初始化值 true */
/* 没有回调并且timerTSR 大于 0 的情况下 并且 有等待掩码, poll 定义为 -> source0 处理了 或者 定义唤醒时间为0 */
if (!poll && (rlm->_observerMask & kCFRunLoopBeforeWaiting)) __CFRunLoopDoObservers(rl, rlm, kCFRunLoopBeforeWaiting);
/* 设置CFRunLoopRef 睡眠标志位。因为后面有进行一个 mach_msg 的等待操作 */
__CFRunLoopSetSleeping(rl);
__CFPortSetInsert(dispatchPort, waitSet); /* 将主端口 插入等待集合中 */
__CFRunLoopModeUnlock(rlm);
__CFRunLoopUnlock(rl);
CFAbsoluteTime sleepStart = poll ? 0.0 : CFAbsoluteTimeGetCurrent();
if (kCFUseCollectableAllocator) {
memset(msg_buffer, 0, sizeof(msg_buffer));
}
msg = (mach_msg_header_t *)msg_buffer;
__CFRunLoopServiceMachPort(waitSet, &msg, sizeof(msg_buffer), &livePort, poll ? 0 : TIMEOUT_INFINITY, &voucherState, &voucherCopy);
__CFRunLoopLock(rl);
__CFRunLoopModeLock(rlm);
rl->_sleepTime += (poll ? 0.0 : (CFAbsoluteTimeGetCurrent() - sleepStart));
/* 从端口集合中移除 disaptchPort */
__CFPortSetRemove(dispatchPort, waitSet);
__CFRunLoopSetIgnoreWakeUps(rl);
// user callouts now OK again
__CFRunLoopUnsetSleeping(rl); //重置睡眠状态
/* pool代表: 回调过 或者 触发时间为0, 根据掩码进行回调 */
if (!poll && (rlm->_observerMask & kCFRunLoopAfterWaiting)) __CFRunLoopDoObservers(rl, rlm, kCFRunLoopAfterWaiting);
/* 处理 mach 消息成功的标签*/
handle_msg:;
__CFRunLoopSetIgnoreWakeUps(rl);
if (MACH_PORT_NULL == livePort) {
CFRUNLOOP_WAKEUP_FOR_NOTHING();
} else if (livePort == rl->_wakeUpPort) {
CFRUNLOOP_WAKEUP_FOR_WAKEUP();
} else if (rlm->_timerPort != MACH_PORT_NULL && livePort == rlm->_timerPort) {
CFRUNLOOP_WAKEUP_FOR_TIMER();
if (!__CFRunLoopDoTimers(rl, rlm, mach_absolute_time())) {
// Re-arm the next timer
__CFArmNextTimerInMode(rlm, rl);
}
} else if (livePort == dispatchPort) {
CFRUNLOOP_WAKEUP_FOR_DISPATCH();
__CFRunLoopModeUnlock(rlm);
__CFRunLoopUnlock(rl);
_CFSetTSD(__CFTSDKeyIsInGCDMainQ, (void *)6, NULL);
__CFRUNLOOP_IS_SERVICING_THE_MAIN_DISPATCH_QUEUE__(msg);
_CFSetTSD(__CFTSDKeyIsInGCDMainQ, (void *)0, NULL);
__CFRunLoopLock(rl);
__CFRunLoopModeLock(rlm);
sourceHandledThisLoop = true;
didDispatchPortLastTime = true;
} else {
/* 接收端口不为空,并且没有满足 timer、主队列端口情况下,处理 source1 */
CFRUNLOOP_WAKEUP_FOR_SOURCE();
voucher_t previousVoucher = _CFSetTSD(__CFTSDKeyMachMessageHasVoucher, (void *)voucherCopy, os_release);
// Despite the name, this works for windows handles as well
CFRunLoopSourceRef rls = __CFRunLoopModeFindSourceForMachPort(rl, rlm, livePort);
if (rls) {
mach_msg_header_t *reply = NULL;
/* source1 出现了 */
sourceHandledThisLoop = __CFRunLoopDoSource1(rl, rlm, rls, msg, msg->msgh_size, &reply) || sourceHandledThisLoop;
if (NULL != reply) {
/* 收到消息后,返回一个消息体,通知内核响应???? */
(void)mach_msg(reply, MACH_SEND_MSG, reply->msgh_size, 0, MACH_PORT_NULL, 0, MACH_PORT_NULL);
CFAllocatorDeallocate(kCFAllocatorSystemDefault, reply);
}
}
// Restore the previous voucher
_CFSetTSD(__CFTSDKeyMachMessageHasVoucher, previousVoucher, os_release);
}
if (msg && msg != (mach_msg_header_t *)msg_buffer) free(msg);
__CFRunLoopDoBlocks(rl, rlm);
if (sourceHandledThisLoop && stopAfterHandle/* CFRunLoopRun ->false */) {
retVal = kCFRunLoopRunHandledSource;
} else if (timeout_context->termTSR < mach_absolute_time()) {
retVal = kCFRunLoopRunTimedOut;
} else if (__CFRunLoopIsStopped(rl)) {
__CFRunLoopUnsetStopped(rl);
retVal = kCFRunLoopRunStopped;
} else if (rlm->_stopped) {
rlm->_stopped = false;
retVal = kCFRunLoopRunStopped;
} else if (__CFRunLoopModeIsEmpty(rl, rlm, previousMode)) {
retVal = kCFRunLoopRunFinished;
}
voucher_mach_msg_revert(voucherState);
os_release(voucherCopy);
} while (0 == retVal); // 循环结束, retVal 等于 0
/* 释放超时timer */
if (timeout_timer) {
dispatch_source_cancel(timeout_timer);
dispatch_release(timeout_timer);
} else {
free(timeout_context);
}
return retVal;
} //__CFRunLoopRun
无论遇到什么困难、一往直前

 浙公网安备 33010602011771号
浙公网安备 33010602011771号