强化学习DQN算法实战之CartPole(百度PARL)
简介
这篇笔记主要是记录了百度PARL的学习过程中感觉还比较经典且入门的部分。
CartPole也相当于强化学习里面的Helloworld了吧。
环境描述
基本环境可以参考:https://gym.openai.com/envs/CartPole-v1/ 以及https://github.com/PaddlePaddle/PARL/tree/develop/examples/DQN
学习的目标是使得木棍在小车上树立的时间尽量长。action的选择只有向左或者是向右。环境会自动给出给出反馈,每一步后的得分,下一个局面的描述的状态,是否是结束。环境状态被gym自动封装成一个np.array,可以通过有关的API获取信息。 在这个例子中,环境的描述是一个4维的向量,我们不必管这4维向量的意义,只需要知道有这个描述即可(当然,如果你感兴趣,可以深究)。每个环境,gym都封装了一分数reward。而且,如果是结束状态,gym会给出描述符。这些在下面的代码中会有说明。
算法介绍和说明
先给出基本算法描述,算法来自上面的参考连接:
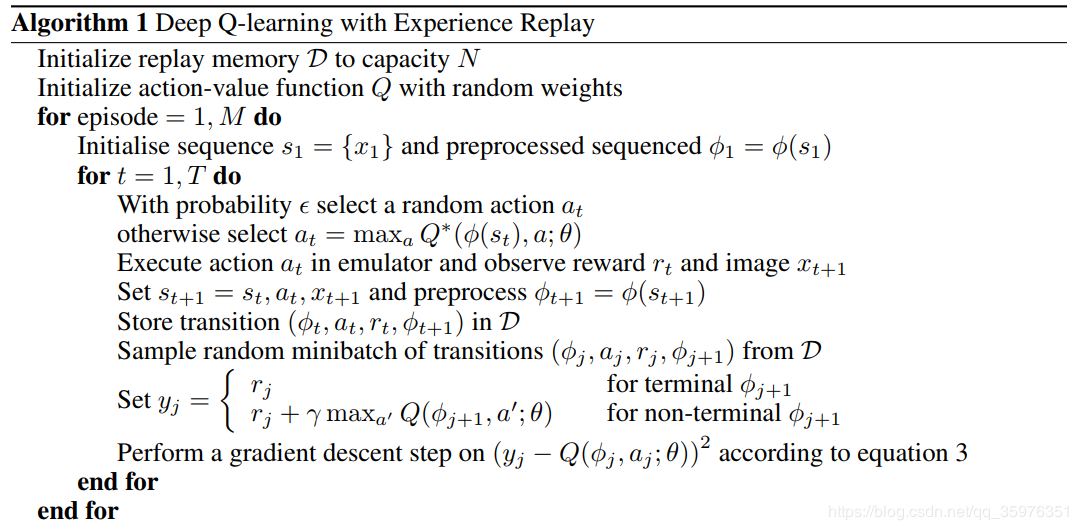
这是一个最基本的Off-Policy借助Replay-Buffer和神经网络实现的算法。上面的ϕ,是表示一个连贯的输入,因为上述的算法是输入了一系列的图片。不过在这个例子中,可以把ϕ理解成仅仅输入当前的局面,即 。之后会有exploration的操作,这是为了随机的选取那些评估分数比较低,但是可能会有较好表现的行动。Q(s,a) Q(s,a)Q(s,a)表示一个Q-function,它的作用是给状态s下的每个行动a一个评估分数。实际操作中,Q是一个神经网络,每个状态作为神经网络的输入,神经网络的输出是所有的行动a的评估分数。算法给出了 yi的计算法则。对神经网络进行BP的时候,就根据这个公式来即可。每次从buffer中选取一个批次的数据,执行随机梯度下降SGD算法,即可进行修正。
。之后会有exploration的操作,这是为了随机的选取那些评估分数比较低,但是可能会有较好表现的行动。Q(s,a) Q(s,a)Q(s,a)表示一个Q-function,它的作用是给状态s下的每个行动a一个评估分数。实际操作中,Q是一个神经网络,每个状态作为神经网络的输入,神经网络的输出是所有的行动a的评估分数。算法给出了 yi的计算法则。对神经网络进行BP的时候,就根据这个公式来即可。每次从buffer中选取一个批次的数据,执行随机梯度下降SGD算法,即可进行修正。
代码示例(在AI Studio平台)
Step1 安装依赖
!pip uninstall -y parl !pip uninstall -y pandas scikit-learn !pip install gym !pip install paddlepaddle==1.6.3 #尽量确保版本为此 !pip install parl==1.3.1 #尽量确保版本为此
Step2 导入依赖
import parl from parl import layers import paddle.fluid as fluid import copy import numpy as np import os import gym from parl.utils import logger
Step3 设置超参数
LEARN_FREQ = 5 # 训练频率,不需要每一个step都learn,攒一些新增经验后再learn,提高效率 MEMORY_SIZE = 20000 # replay memory的大小,越大越占用内存 MEMORY_WARMUP_SIZE = 200 # replay_memory 里需要预存一些经验数据,再开启训练 BATCH_SIZE = 32 # 每次给agent learn的数据数量,从replay memory随机里sample一批数据出来 LEARNING_RATE = 0.001 # 学习率 GAMMA = 0.99 # reward 的衰减因子,一般取 0.9 到 0.999 不等
Step4 搭建Model、Algorithm、Agent架构
class Model(parl.Model):
def __init__(self, act_dim):
hid1_size = 128
hid2_size = 128
# 3层全连接网络
self.fc1 = layers.fc(size=hid1_size, act='relu')
self.fc2 = layers.fc(size=hid2_size, act='relu')
self.fc3 = layers.fc(size=act_dim, act=None)
def value(self, obs):
# 定义网络
# 输入state,输出所有action对应的Q,[Q(s,a1), Q(s,a2), Q(s,a3)...]
h1 = self.fc1(obs)
h2 = self.fc2(h1)
Q = self.fc3(h2)
return Q
class DQN(parl.Algorithm):
def __init__(self, model, act_dim=None, gamma=None, lr=None):
""" DQN algorithm
Args:
model (parl.Model): 定义Q函数的前向网络结构
act_dim (int): action空间的维度,即有几个action
gamma (float): reward的衰减因子
lr (float): learning rate 学习率.
"""
self.model = model
self.target_model = copy.deepcopy(model)
assert isinstance(act_dim, int)
assert isinstance(gamma, float)
assert isinstance(lr, float)
self.act_dim = act_dim
self.gamma = gamma
self.lr = lr
def predict(self, obs):
""" 使用self.model的value网络来获取 [Q(s,a1),Q(s,a2),...]
"""
return self.model.value(obs)
def learn(self, obs, action, reward, next_obs, terminal):
""" 使用DQN算法更新self.model的value网络
"""
# 从target_model中获取 max Q' 的值,用于计算target_Q
next_pred_value = self.target_model.value(next_obs)
best_v = layers.reduce_max(next_pred_value, dim=1)
best_v.stop_gradient = True # 阻止梯度传递
terminal = layers.cast(terminal, dtype='float32')
target = reward + (1.0 - terminal) * self.gamma * best_v
pred_value = self.model.value(obs) # 获取Q预测值
# 将action转onehot向量,比如:3 => [0,0,0,1,0]
action_onehot = layers.one_hot(action, self.act_dim)
action_onehot = layers.cast(action_onehot, dtype='float32')
# 下面一行是逐元素相乘,拿到action对应的 Q(s,a)
# 比如:pred_value = [[2.3, 5.7, 1.2, 3.9, 1.4]], action_onehot = [[0,0,0,1,0]]
# ==> pred_action_value = [[3.9]]
pred_action_value = layers.reduce_sum(
layers.elementwise_mul(action_onehot, pred_value), dim=1)
# 计算 Q(s,a) 与 target_Q的均方差,得到loss
cost = layers.square_error_cost(pred_action_value, target)
cost = layers.reduce_mean(cost)
optimizer = fluid.optimizer.Adam(learning_rate=self.lr) # 使用Adam优化器
optimizer.minimize(cost)
return cost
def sync_target(self):
""" 把 self.model 的模型参数值同步到 self.target_model
"""
self.model.sync_weights_to(self.target_model)
class Agent(parl.Agent):
def __init__(self,
algorithm,
obs_dim,
act_dim,
e_greed=0.1,
e_greed_decrement=0):
assert isinstance(obs_dim, int)
assert isinstance(act_dim, int)
self.obs_dim = obs_dim
self.act_dim = act_dim
super(Agent, self).__init__(algorithm)
self.global_step = 0
self.update_target_steps = 200 # 每隔200个training steps再把model的参数复制到target_model中
self.e_greed = e_greed # 有一定概率随机选取动作,探索
self.e_greed_decrement = e_greed_decrement # 随着训练逐步收敛,探索的程度慢慢降低
def build_program(self):
self.pred_program = fluid.Program()
self.learn_program = fluid.Program()
with fluid.program_guard(self.pred_program): # 搭建计算图用于 预测动作,定义输入输出变量
obs = layers.data(
name='obs', shape=[self.obs_dim], dtype='float32')
self.value = self.alg.predict(obs)
with fluid.program_guard(self.learn_program): # 搭建计算图用于 更新Q网络,定义输入输出变量
obs = layers.data(
name='obs', shape=[self.obs_dim], dtype='float32')
action = layers.data(name='act', shape=[1], dtype='int32')
reward = layers.data(name='reward', shape=[], dtype='float32')
next_obs = layers.data(
name='next_obs', shape=[self.obs_dim], dtype='float32')
terminal = layers.data(name='terminal', shape=[], dtype='bool')
self.cost = self.alg.learn(obs, action, reward, next_obs, terminal)
def sample(self, obs):
sample = np.random.rand() # 产生0~1之间的小数
if sample < self.e_greed:
act = np.random.randint(self.act_dim) # 探索:每个动作都有概率被选择
else:
act = self.predict(obs) # 选择最优动作
self.e_greed = max(
0.01, self.e_greed - self.e_greed_decrement) # 随着训练逐步收敛,探索的程度慢慢降低
return act
def predict(self, obs): # 选择最优动作
obs = np.expand_dims(obs, axis=0)
pred_Q = self.fluid_executor.run(
self.pred_program,
feed={'obs': obs.astype('float32')},
fetch_list=[self.value])[0]
pred_Q = np.squeeze(pred_Q, axis=0)
act = np.argmax(pred_Q) # 选择Q最大的下标,即对应的动作
return act
def learn(self, obs, act, reward, next_obs, terminal):
# 每隔200个training steps同步一次model和target_model的参数
if self.global_step % self.update_target_steps == 0:
self.alg.sync_target()
self.global_step += 1
act = np.expand_dims(act, -1)
feed = {
'obs': obs.astype('float32'),
'act': act.astype('int32'),
'reward': reward,
'next_obs': next_obs.astype('float32'),
'terminal': terminal
}
cost = self.fluid_executor.run(
self.learn_program, feed=feed, fetch_list=[self.cost])[0] # 训练一次网络
return cost
Step5 ReplayMemory
import random
import collections
import numpy as np
class ReplayMemory(object):
def __init__(self, max_size):
self.buffer = collections.deque(maxlen=max_size)
# 增加一条经验到经验池中
def append(self, exp):
self.buffer.append(exp)
# 从经验池中选取N条经验出来
def sample(self, batch_size):
mini_batch = random.sample(self.buffer, batch_size)
obs_batch, action_batch, reward_batch, next_obs_batch, done_batch = [], [], [], [], []
for experience in mini_batch:
s, a, r, s_p, done = experience
obs_batch.append(s)
action_batch.append(a)
reward_batch.append(r)
next_obs_batch.append(s_p)
done_batch.append(done)
return np.array(obs_batch).astype('float32'), \
np.array(action_batch).astype('float32'), np.array(reward_batch).astype('float32'),\
np.array(next_obs_batch).astype('float32'), np.array(done_batch).astype('float32')
def __len__(self):
return len(self.buffer)
Step6 Training && Test(训练&&测试)
def run_episode(env, agent, rpm):
total_reward = 0
obs = env.reset()
step = 0
while True:
step += 1
action = agent.sample(obs) # 采样动作,所有动作都有概率被尝试到
next_obs, reward, done, _ = env.step(action)
rpm.append((obs, action, reward, next_obs, done))
# train model
if (len(rpm) > MEMORY_WARMUP_SIZE) and (step % LEARN_FREQ == 0):
(batch_obs, batch_action, batch_reward, batch_next_obs,
batch_done) = rpm.sample(BATCH_SIZE)
train_loss = agent.learn(batch_obs, batch_action, batch_reward,
batch_next_obs,
batch_done) # s,a,r,s',done
total_reward += reward
obs = next_obs
if done:
break
return total_reward
# 评估 agent, 跑 5 个episode,总reward求平均
def evaluate(env, agent, render=False):
eval_reward = []
for i in range(5):
obs = env.reset()
episode_reward = 0
while True:
action = agent.predict(obs) # 预测动作,只选最优动作
obs, reward, done, _ = env.step(action)
episode_reward += reward
if render:
env.render()
if done:
break
eval_reward.append(episode_reward)
return np.mean(eval_reward)
Step7 创建环境和Agent,创建经验池,启动训练,保存模型
env = gym.make('CartPole-v0') # CartPole-v0: 预期最后一次评估总分 > 180(最大值是200)
action_dim = env.action_space.n # CartPole-v0: 2
obs_shape = env.observation_space.shape # CartPole-v0: (4,)
rpm = ReplayMemory(MEMORY_SIZE) # DQN的经验回放池
# 根据parl框架构建agent
model = Model(act_dim=action_dim)
algorithm = DQN(model, act_dim=action_dim, gamma=GAMMA, lr=LEARNING_RATE)
agent = Agent(
algorithm,
obs_dim=obs_shape[0],
act_dim=action_dim,
e_greed=0.1, # 有一定概率随机选取动作,探索
e_greed_decrement=1e-6) # 随着训练逐步收敛,探索的程度慢慢降低
# 加载模型
# save_path = './dqn_model.ckpt'
# agent.restore(save_path)
# 先往经验池里存一些数据,避免最开始训练的时候样本丰富度不够
while len(rpm) < MEMORY_WARMUP_SIZE:
run_episode(env, agent, rpm)
max_episode = 2000
# 开始训练
episode = 0
while episode < max_episode: # 训练max_episode个回合,test部分不计算入episode数量
# train part
for i in range(0, 50):
total_reward = run_episode(env, agent, rpm)
episode += 1
# test part
eval_reward = evaluate(env, agent, render=False) # render=True 查看显示效果
logger.info('episode:{} e_greed:{} test_reward:{}'.format(
episode, agent.e_greed, eval_reward))
# 训练结束,保存模型
save_path = './dqn_model.ckpt'
agent.save(save_path)
感觉吧,与监督学习相比,强化学习多了action,environment等概念。虽然可以将reward类比成监督学习中的label(或者反过来,label也可以认为是强化学习中最终的reward),但通过action与environment不断的交互甚至改变environment这一特点,是监督学习中所没有的。在构建应用的时候,监督学习的学习的目标:label,灌入的数据都是一个定值。比如,图像的分类的问题,在用CNN训练的时候,图片本身不发生变化,label也不会发生变化,唯一变化的是神经网络中的权重值。但强化学习在训练的时候,除了神经网络中的权重会发生变化(如果用NN建模的话),environment、reward等都会发生动态的变化。
从结果曲线来看,强化学习跟监督学习也不太一样,监督的曲线是下降的。RL的曲线会波动的很厉害(上上下下的),不过如果模型好的话,大体上会是上升的。不知道是不是参数选择上面还要改一改