spi 总线协议记录
摘抄至: http://blog.csdn.net/skyflying2012/article/details/11710801
-
概述:
SPI, Serial Perripheral Interface , 串行外部接口,是摩托罗拉公司提出的一种同步串行接口技术。
SPI 在物理上连接了外围微控制器设备(PICmicro)上面的微控制单元(MCU)上面一个叫作同步串行端口的模块来实现的,他运行MCU以全双工的同步串行方式,与各种外围设备进行高速数据通信。 -
特点
-
通过主从模式控制。(master-slave)
SPI 规定了两个SPI设备必须由主设备(master)来控制从设备(slave),一个主设备可以通过提供clock以及对slave进行片选(slave select)来控制多个SPI设备,SPI协议还规定,slave设备的时钟通过master SPICK引脚提供给 slave设备,slave自身不能产生时钟,没有clock salve不能正常工作。
-
采用同步方式(synchronous)传输数据。
master 设备会根据将要交换的数据产生对应的时钟脉冲(clock pulse),时钟脉冲组成时钟信号(clock signal)
时钟信号通过时钟极性(CPOL)和时钟相应(CPHA)控制两个SPI 设备间何时数据交换及何时对接收到的数据进行采样,来保证数据在两个设备间是同步传输的。-
数据交换(data exchanges)
SPI 设备间的数据传输之所以叫数据交换而不是数据传输,是因为 SPI 协议规定一个 SPI 设备不能再数据通信的时候仅仅充当一个 transmitter 或者是 receiver,在每个时钟周期内,SPI设备都会发送 1bit大小的数据,相当于该设备有1bit的数据被交换了。
-
一个slave设备要想能够接收到 master 发送给来的控制信号,必须在此之前能够被 master 进行访问, 所以, master 设备必须先通过 CS Pin 对slave 设备进行片选,把要访问的 slave 都片选上。
-
在数据的传输过程中,每次接收到的数据必须在下一次数据传输之前被采样,如果之前接收的数据没有被采样,那么这些 已经收到到的数据可能被丢弃,导致 SPI 模块最终失效,因此,在程序中,一般都会在 SPI 传输完数据之后,去读取 SPI 设备里面的数据,即使这些数据是在我们程序中是没有用的。
-
-
工作机制
-
概述:
-
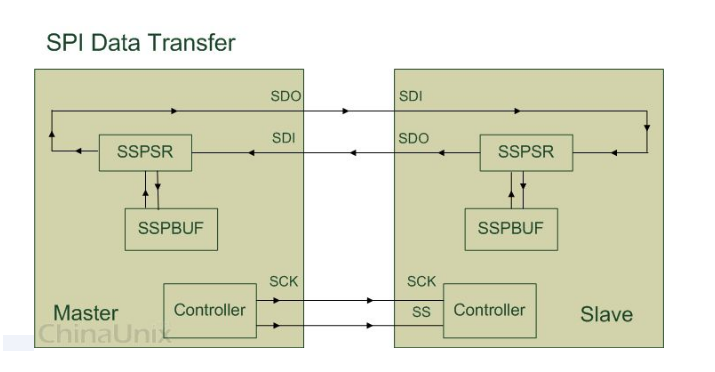
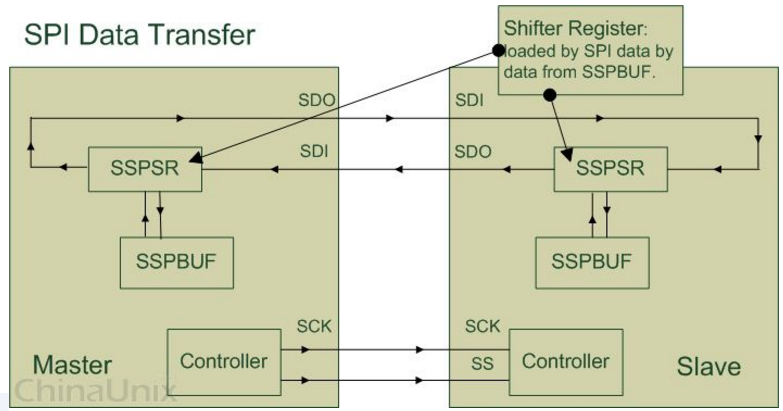
上图只是对 SPI 设备间通信的一个简单的描述,几个模块名称详解如下:
-
SSPBUF Synchronous Serial Port Buffer, 泛指 SPI 设备店里面的内部缓冲区,一般在物理上以 FIFO 的形式存在,保存传输过程中的临时数据。
-
SSPSR, Synchronous Serial Port Register, 指的是 SPI 设备里面的移位寄存器(shift register),j 他的作用是根据设置好的数据位宽(bit-width)把数据移入或者移出 SSPBUF.
-
Controller , 指的是 SPI 设备里面的控制寄存器,控制通过配置他们来配置SPI 总线的传输模式。
-
通常情况,我们只需要对上面的四个引脚进行编程即可控制整个 SPI 设备间的数据通信。
-
SCK : Serial Clock , master 往 slave 传输时钟信号,控制交换的时机和速率。
-
SS/CS, slave select/ chip select 片选信号, 用于master 片选 slave设备,被片选的slave设备能与master进行通信。
-
SDI / SDO , master数据输入, master数据输出。
-
时序分析
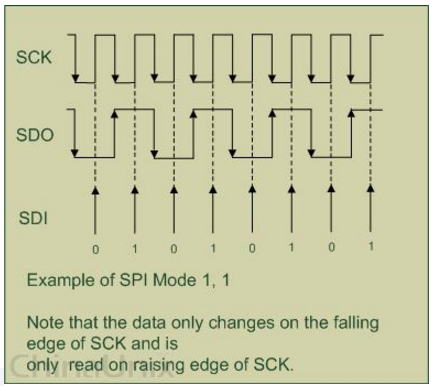
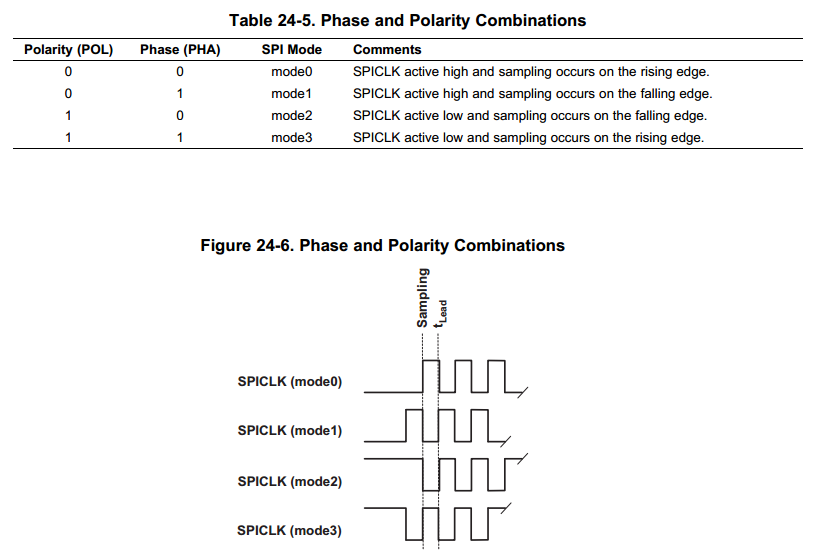
上图通过 master 设备与 slave 设备之间交换 1 BYTE 数据来说明 SPI 协议的工作机制。- CPOL : 时钟极性,表示 SPI 空闲时,时钟信号是高电平还是低电平,如果是 CPOL 设为 1, 那么空闲时 SCK 的时间时钟信号为高, 当 CPOL 被设为 0 时正好相反。
- CPHA : 时钟相应,若是 CPHA 被设置为1, 说明从空闲电平变化开始,从 0 开始计算,第 CPHA 个电平变化的时候开始采样,如果 CPHA = 0 , 说明空闲电平变为非空电平的那个沿就开始采样,如果为1 , 说明是非空闲电平变为空闲电平的那个沿开始采样。如下图所示
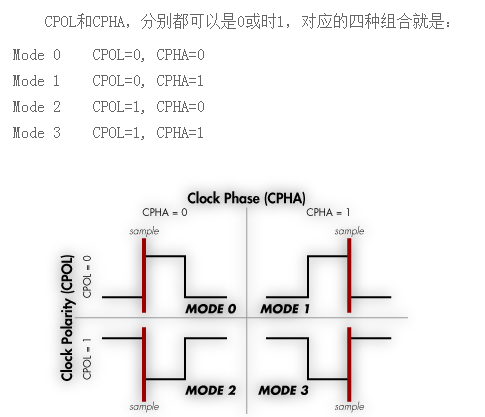
参考: http://blog.chinaunix.net/uid-20620288-id-3164384.html - 上图的 Mode 1, 1, 说明 CPOL = 1, CPHA = 1, 说明空闲时 SCK 信号为高电平, 低电平非空闲 第 1 次电平发生变化时开始采样。
-
SSPSR
-
SSPSR 是 SPI 设备内的移位寄存器(shift register),他主要的作用是根据SPI 的时钟信号状态,往SSPBUF 里移入或者移出数据
-
每次移动的数据由 BUS-width 以及 channel-width 所决定
-
BUS-width 的作用是指定地址总线到 master设备之间数据传输的单位。
-
channel-width 的作用是指定 master 与 slave 设备之间传输的单位。
-
SSPBUF
-
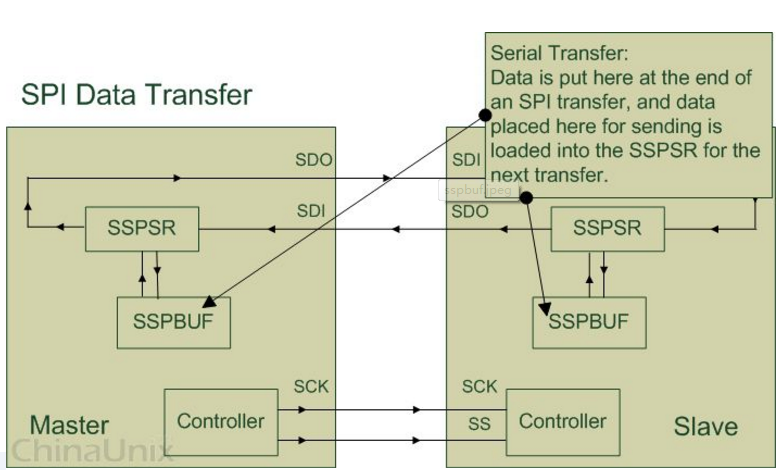
我们知道,在每个时钟周期内,master 与slave 之间交换的数据其实都是 SPI 内部移位寄存器从SSPBUF 里面拷贝的,我们可以通过往 SSPBUF 对应的寄存器读写数据,间接地去控制SPI 设备内部的SSPBUF。
-
Controller
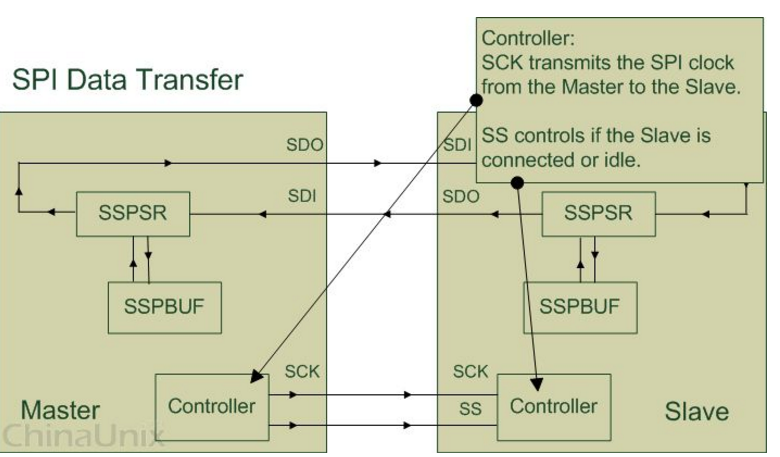
- master 设备里面的controller 主要通过时钟信号(clock signal)以及片选信号来控制 slave 设备,salve 设备会一直等待,直到接收到 master 设备发过来的片选信号,然后根据时钟信号来工作。
-

 浙公网安备 33010602011771号
浙公网安备 33010602011771号